Vehículo marino para transporte y operación de vehículos no tripulados.
Vehículo marino para transporte y operación de vehículos no tripulados,
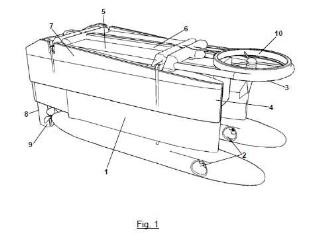
donde el vehículo marino comprende: al menos un casco (1) que contiene, equipos de alimentación energética, tanques y depósitos, equipos de impulsión, una estructura principal (3) para soporte, apoyo, transporte y anclaje de al menos una góndola (4, 5) configurada para albergar, amarrar y estibar una pluralidad de vehículos no tripulados, un módulo central (6) de comunicaciones y datos, medios de control de la dirección (8), y medios de propulsión (9). El vehículo está configurado para funcionar de manera autónoma sin contacto y/o conexión física con puesto de control remoto. El vehículo comprende medios de captación de energía propios, seleccionables entre paneles solares (7), aerogeneradores (10), otros sistemas de captación de energía o una combinación de los mismos.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201232045.
Solicitante: UNIVERSIDAD POLITECNICA DE MADRID.
Nacionalidad solicitante: España.
Inventor/es: PEREZ ARRIBAS,FRANCISCO, COSMA,Ernö Péter, CASTELLS ARNAL,Jaime Francisco.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B63B35/40 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63B BUQUES U OTRAS EMBARCACIONES FLOTANTES; EQUIPAMIENTO PARA EMBARCACIONES (disposiciones relativas a la ventilación, calefacción, refrigeración o acondicionamiento de aire en los buques B63J 2/00; subestructuras flotantes como soportes de las dragas o máquinas par el movimiento de tierras E02F 9/06). › B63B 35/00 Buques o estructuras flotantes similares especialmente adaptadas a fines específicos y no previstas de otra manera. › para transporte de embarcaciones.
- B63B38/00
- B63G8/00 B63 […] › B63G INSTALACIONES OFENSIVAS Y DEFENSIVAS EN LOS BUQUES; COLOCACION DE MINAS; DRAGADO DE MINAS; SUBMARINOS; PORTAAVIONES (medios de ataque o de defensa en general, p. ej. torretas, F41H). › Embarcaciones sumergibles, p. ej. submarinos (cascos de submarinos B63B 3/13; cámaras de buceo unidas mecánicamente a una base, p. ej. mediante un cable B63C 11/34; artefactos automotores de buceo B63C 11/46; torpedos F42B 19/00).
Fragmento de la descripción:
Vehículo marino para transporte y operación de vehículos no tripulados.
Campo de la invención La invención se encuadra en el sector técnico de la tecnología naval, y en el de las tecnologías de las comunicaciones, concretamente tecnologías de control y guía a distancia aplicadas a vehículos marinos no tripulados.
Antecedentes de la invención Los vehículos submarinos no tripulados, como por ejemplo los ROV (Remote Operated underwater Vehicles) , los cuales son vehículos submarinos no tripulados operados por control remoto o los gliders u otros vehículos submarinos no tripulados que se pueden operar sin cordón umbilical siguiendo instrucciones preprogramadas, ofrecen grandes posibilidades para multitud de aplicaciones. En la actualidad la gran totalidad de ROV conocidos trabajan siempre condicionados por una ligadura necesaria con la superficie que se denomina cordón umbilical a través del cual, por un lado, se transmite alimentación o energía al vehículo no tripulado para su funcionamiento para su desplazamiento y, por otro lado, se transmiten datos, ya sean distintas señales para controlar, por ejemplo, el movimiento del vehículo no tripulado o datos recogidos por diferentes tipos de sensores instalados en el vehículo no tripulado.
Asumiendo la necesidad de la presencia de ese cordón umbilical, se observa que el transporte del conjunto vehículo submarino no tripulado + Cordón umbilical + sistema de control, se realiza normalmente mediante una embarcación dotada con una tripulación más o menos numerosa, lo cual implica una limitación importante en el uso de estos vehículos por la necesaria presencia de un equipo humano que lo maneje desde la embarcación, así como del resto de tripulación que pueda ser necesaria para el traslado al punto de operación. A todo esto habría que sumarle el propio coste de flete de la embarcación. Por consiguiente, esta “ligadura” merma de forma considerable la operatividad de este tipo de vehículos.
En la patente US2011144836 A1 se describe un sistema de investigación submarina en el cual se incluyen medios para controlar y alimentar ROVs, dependiendo el guiado de los mismos de un buque de superficie (con la consiguiente tripulación) al que va unida mediante un cordón umbilical físico.
En la patente KR20110012324 A se describe un sistema de carga para un robot submarino de exploración en la cual se incluyen medios para alimentar vehículos submarinos no tripulados, no se describe el vehículo en sí, si no el sistema de carga que se haya fijo al fondo marino y se encarga del aporte energético de vehículos no tripulados.
En la patente GB2453645 A se describe un método para operar un vehículo submarino autónomo que incluye un cordón umbilical unido a un buque de superficie.
Finalmente, la patente WO2005030571 A2 se describe un sistema con una unidad que permite la operación de vehículos submarinos o de superficie de forma que éstos puedan repostar en la misma (en este caso no está sumergido) , pero la unidad depende de un buque nodriza de superficie al que se haya unido por cordón umbilical. La unidad permite usar y recuperar estos vehículos no tripulados en zonas a las que el buque nodriza no puede acceder por distintos motivos.
Por todo ello, se ha detectado la necesidad de diseñar un vehículo intermedio que haga de puente de control, comunicaciones y transporte para al menos un vehiculo submarino no tripulado, como por ejemplo un ROV para que desde una base remota pueda ser controlado tanto el vehículo intermedio, con todo su potencial, como el de el o los vehículos no tripulados que transporte y opere.
Este objetivo se consigue por medio de la invención tal y como está definida en la reivindicación 1. En las reivindicaciones dependientes se definen realizaciones preferidas de la invención.
Descripción de la invención La invención se refiere a un vehículo marino para transporte y operación de vehículos no tripulados, donde el vehículo marino comprende al menos un casco que contiene equipos de alimentación energética, tanques y depósitos y equipos de impulsión del vehiculo, , una estructura principal para soporte, apoyo, transporte y anclaje de al menos una góndola configurada para albergar, amarrar y estibar una pluralidad de vehículos no tripulados, un modulo central de comunicaciones y datos, medios de control de la dirección, y medios de propulsión.
El vehículo marino para transporte y operación de vehículos no tripulados objeto de la presente invención tiene la particularidad de que está configurado para funcionar de manera autónoma sin contacto y/o conexión física con un puesto de control remoto.
De esta manera, el vehículo marino descrito es capaz de transportar varios vehículos no tripulados a un determinado emplazamiento de forma segura, transmitiéndose la información recogida bien por los vehículos no tripulados o por el propio vehículo que contará con sensores adecuados a una determinada misión.
En otro aspecto de la invención el vehículo podrá comprender medios de captación de energía propios, seleccionables entre paneles solares, aerogeneradores, otros sistemas de captación de energía o una combinación de los mismos. De esta forma el vehículo utilizará fuentes de energía renovable para tener una mayor autonomía y alcance operativos y para ahorrar de forma ostensible en costes de operación.
El vehículo podrá comprender al menos una unidad de propulsión lateral, pudiendo disponer de dos o más unidades, no siendo esta característica en ningún caso limitativa.
El control del vehículo se podrá realizar desde el puesto de control remota, de forma remota, o bien se podrá realizar desde el propio vehículo el cual puede disponer de un puesto de control a bordo, en el caso de que se pretenda operar por un operario de forma más directa, convirtiéndose en un vehículo tripulado especializado para transporte y operación vehículos no tripulados.
El vehículo puede contar con sistemas que permiten su operación de forma autónoma en caso de pérdida de conexión con el puesto de control y dispone de capacidad de decisión a la hora de recuperar los vehículos que transporta y opera en caso de presentarse malas condiciones de trabajo así como de la capacidad, una vez conseguida la recuperación de los vehículos, de realizar una inmersión a una profundidad segura hasta que las condiciones en superficie sean adecuadas. A tal efecto, en el vehículo se pueden disponer sistemas propios de monitorización y toma de decisiones, un sistema de recuperación automática de vehículos no tripulados en caso de detección de condiciones adversas.
Los medios de inmersión del vehículo podrán estar configurados para la inmersión automática a profundidad segura en caso de condiciones adversas y para la emersión automática a superficie en caso de mejora de las condiciones adversas.
La estructura principal del vehículo marino objeto de la presente invención podrá ser extensible telescópicamente y podrá estar configurada para albergar vehículos no tripulados de diferentes tipos, tamaños y pesos en sus respectivas góndolas. Además cuando la estructura principal se recoja se podrá conseguir reducir las dimensiones del vehículo para de este modo facilitar su manejo y transporte.
Breve descripción de los dibujos A continuación se pasa a describir de manera muy breve una serie de dibujos que ayudan a comprender mejor la invención y que se relacionan expresamente con una realización de dicha invención que se presenta como un ejemplo no limitativo de ésta.
La Figura 1 representa una vista en perspectiva del vehículo marino para transporte y operación de vehículos no tripulados objeto de la presente invención.
En las figuras anteriormente citadas se identifican una serie de referencias que corresponden a los elementos indicados a continuación, sin que ello suponga carácter limitativo alguno:
1. casco del vehiculo
2. unidad de propulsión lateral
3. estructura principal
4. góndola principal
5. góndola secundaria
6. módulo central de comunicaciones y datos
7. paneles solares
8. sistema de control de la dirección
9. medios de propulsión
10. mini-aerogenerador.
Descripción detallada de un modo de realización preferido de la invención En la figura 1 se ha representado una vista en perspectiva del vehiculo marino para transporte y operación de vehículos no tripulados objeto de la presente invención el cual comprende en primer lugar unos cascos 1 los cuales comprenden todos los equipos de iluminación, de alimentación energética, tales como depósitos de combustible en el caso...
Reivindicaciones:
1. Vehículo marino para transporte y operación de vehículos no tripulados, donde el vehículo marino comprende: Al menos un casco (1) que contiene, equipos de alimentación energética, tanques y depósitos, equipos de impulsión, una estructura principal (3) para soporte, apoyo, transporte y anclaje de al menos una góndola (4, 5) configurada para albergar, amarrar y estibar una pluralidad de vehículos no tripulados, un módulo central (6) de comunicaciones y datos, medios de control de la dirección (8) , y medios de propulsión (9) ,
caracterizado porque el vehículo está configurado para funcionar de manera autónoma sin contacto y/o conexión física con puesto de control remoto.
2. Vehículo marino para transporte y operación de vehículos no tripulados según la reivindicación 1, caracterizado porque comprende medios de captación de energía propios, seleccionables entre paneles solares (7) , aerogeneradores (10) , otros sistemas de captación de energía o una combinación de los mismos.
3. Vehículo marino para transporte y operación de vehículos no tripulados según las reivindicaciones 1 y 2 caracterizado porque comprende al menos una unidad de propulsión lateral (2) .
4. Vehículo marino para transporte y operación de vehículos no tripulados según las reivindicaciones 1 a 3, caracterizado porque el control del vehículo se realiza desde el propio vehículo el cual dispone de un puesto de control a bordo.
5. Vehículo marino para transporte y operación de vehículos no tripulados según las reivindicaciones anteriores, caracterizado porque comprende sistemas propios de monitorización y toma de decisiones.
6. Vehículo marino para transporte y operación de vehículos no tripulados según las reivindicaciones anteriores, caracterizado porque comprende un sistema de recuperación automática de vehículos no tripulados en caso de detección de condiciones adversas.
7. Vehículo marino para transporte y operación de vehículos no tripulados según las reivindicaciones anteriores, caracterizado porque los medios de inmersión del vehículo están configurados para la inmersión automática a profundidad segura en caso de condiciones adversas y para la emersión automática a superficie en caso de mejora de las condiciones adversas.
8. Vehículo marino para transporte y operación de vehículos no tripulados según las reivindicaciones anteriores, caracterizado porque la estructura principal (3) es extensible telescópicamente y está configurada para albergar vehículos no tripulados de diferentes tipos, tamaños y pesos alojados en sus respectivas góndolas (4) y (5) .
Patentes similares o relacionadas:
SISTEMA DE AJUSTE DE MOTORES PARA VEHÍCULOS SUBMARINOS DE OPERACIÓN REMOTA PARA APROVECHAMIENTO DE EMPUJE DE MOTORES, del 16 de Julio de 2020, de UNIVERSIDAD SIMÓN BOLIVAR: La presente invención pertenece al campo de buques u otras embarcaciones flotantes, sus equipos y medios de localización o recuperación de objetos […]
Método para instalar un cable submarino, del 17 de Junio de 2020, de FUNDACION TECNALIA RESEARCH & INNOVATION: Un método para instalar un cable submarino con un aparato sumergible , comprendiendo el método: suministrar alimentación eléctrica […]
Un dispositivo de limpieza de superficie, del 17 de Junio de 2020, de HullWiper Limited: Un dispositivo para limpiar superficies sumergidas en agua, que comprende un miembro de disco soportado de manera giratoria por […]
Comunicaciones entre robots móviles de medio acuático, del 6 de Mayo de 2020, de SAUDI ARABIAN OIL COMPANY: Un sistema robótico de medio acuático, que comprende: - una estación de control ; - un robot submarino que tiene un cuerpo, una […]
Conjunto de batería para submarino, del 15 de Abril de 2020, de NAVAL GROUP: Conjunto de batería para submarino que incluye al menos un ensamblaje mecánico y eléctrico de ramas , incluyendo cada rama al menos un módulo […]
 Vehículo de inspección in-situ de transformador con un casco de jaula, del 25 de Marzo de 2020, de ABB Power Grids Switzerland AG: Un dispositivo de inspección para usar en un contenedor de fluido, que comprende:
al menos un dispositivo de empuje ;
al menos un dispositivo […]
Vehículo de inspección in-situ de transformador con un casco de jaula, del 25 de Marzo de 2020, de ABB Power Grids Switzerland AG: Un dispositivo de inspección para usar en un contenedor de fluido, que comprende:
al menos un dispositivo de empuje ;
al menos un dispositivo […]
Dispositivo de elevación para un submarino, del 8 de Enero de 2020, de ThyssenKrupp Marine Systems GmbH: Dispositivo de elevación para un submarino para transportar una carga útil a lo largo de una dirección de elevación, caracterizado porque […]
SISTEMA DE RECUPERACIÓN ROBÓTICA DE FONDO DE ESPACIO ACUÁTICO CON NANOPARTICULAS DE OXIGENO, del 12 de Diciembre de 2019, de MIRANDA AGÜERO, Manuel: La presente invención se relaciona con un conjunto de recuperación robótica de fondo de espacio acuático mediante nanopartículas de oxígeno, que comprende […]