Unidad de riego robótica.
Un método para regar plantas, comprendiendo el método:
responder a la recepción de un mapa de un área (114),
que determina de si el área (114) necesita agua utilizandoun sistema de procesamiento (200, 302);
responder a la determinación de que el área (114) necesita agua identificando las limitaciones actuales;
determinar si las limitaciones actuales identificadas permiten el riego en el área (114) utilizando el sistema deprocesamiento (200, 302);
responder a la determinación de que las limitaciones actuales permiten el riego en el área (114) generando un plande aplicación de solución de riego (338, 422) utilizando el sistema de procesamiento; y
ejecutar el plan de aplicación de solución de riego (338, 422) utilizando un vehículo de uso general móvil (104, 300).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10160613.
Solicitante: DEERE & COMPANY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: ONE JOHN DEERE PLACE MOLINE, ILLINOIS 61265-8098 ESTADOS UNIDOS DE AMERICA.
Inventor/es: ANDERSON,NOEL WAYNE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A01G25/09 NECESIDADES CORRIENTES DE LA VIDA. › A01 AGRICULTURA; SILVICULTURA; CRIA; CAZA; CAPTURA; PESCA. › A01G HORTICULTURA; CULTIVO DE HORTALIZAS, FLORES, ARROZ, FRUTOS, VID, LÚPULO O ALGAS; SILVICULTURA; RIEGO (recolección de frutas, verduras, lúpulo o productos similares A01D 46/00; crecimiento de algas unicelulares C12N 1/12). › A01G 25/00 Riego de jardines, campos, terrenos de deporte o similares (aparatos o adaptaciones especiales para líquidos fertilizantes A01C 23/00; boquillas o rosetones, aparellajes para pulverización B05B). › Sistemas de riego mediante la utilización de instalaciones móviles sobre ruedas o análogos.
- A01G25/16 A01G 25/00 […] › Control del riego.
- G05D1/02 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
PDF original: ES-2411919_T3.pdf
Fragmento de la descripción:
Unidad de riego robótica Campo de la invención La presente invención se refiere en general a un sistema de control de irrigación y, más particularmente, a un sistema y un método para regar plantas en patios y jardines.
Antecedentes de la invención La irrigación se utiliza típicamente para regar áreas homogéneas grandes, tales como campos, prados y jardines. Se supone que el agua está disponible desde una sola fuente, tal como un pozo, canal o sistema de agua municipal. El agua procedente de sistemas municipales de agua se sobreexplota a menudo durante las épocas de calor o sequía y frecuentemente se implementan restricciones de riego para proporcionar suficiente agua para usos de mayor prioridad. Estas restricciones pueden comenzar como riego de césped en días pares-impares y progresar para completar prohibiciones en el riego de césped y finalmente completar prohibiciones en el riego de jardines.
Los campos y prados tienen típicamente una sola especie de planta y las aplicaciones de agua se basan en sensores de agua, modelos o reglas de evapotranspiración. Este tipo de sistema de irrigación puede ser inadecuado para patios y jardines en los que numerosas especies se cultivan en estrecha proximidad, particularmente para grandesconsumidores de agua como árboles y arbustos junto a menores consumidores de agua. Árboles, arbustos y estructuras también proporcionan sombra, lo cual afecta a la evapotranspiración, que es la suma de la evaporación y la transpiración de las plantas.
Un sistema para el riego de plantas conocido a partir del documento WO-A-2006/060854 comprende un sistema de control para guiar automáticamente un transportador terrestre robótico a lo largo de una trayectoria entre puntos de paso predeterminados tales como puntos de inicio y parada o ubicaciones de fuentes de agua. Para alterar la trayectoria del transportador y para ejecutar programas de aplicación específica el sistema de control incluye un sistema de guía que incluye un sistema de piloto automático que tiene control automático integrado y sistemas de posicionamiento y guía.
El documento US-A-5 927 603 describe un sistema de irrigación automático que comprende un dispositivo de irrigación movible que tiene un sistema de control y sensores que determinan si un área necesita agua. En respuesta a la información de que un área determinada necesita agua, el sistema de control produce la irrigación del área determinada.
El documento US-A1-2004/078092 revela un sistema y un método para reducir los elevados valores de pico de uso de agua que comprenden un sistema de procesamiento que modifica un programa de riego en base a la información recibida de un proveedor de agua y de la información del uso del agua.
Compendio Una realización de la presente invención proporciona un método y un sistema para el riego de plantas. Se recibe un mapa de un área y se hace una determinación en cuanto a si el área necesita agua utilizando una unidad de procesamiento. Si el área necesita agua, se identifican las limitaciones actuales y se hace una determinación utilizando el sistema de procesamiento en cuanto a si las limitaciones actuales permiten el riego. Si las limitaciones actuales permiten el riego, se genera un plan de aplicación de riego utilizando el sistema de procesamiento y se ejecuta el plan de aplicación de agua utilizando un vehículo de uso general móvil.
La presente invención está relaciona con la Solicitud de Patente de EE.UU., comúnmente cedida y en tramitación, Nº. de Serie 12/427051 (Expediente Nº. 18642-US) titulada “Un Método para Proporcionar una Aplicación a Plantas”; la Solicitud de Patente de EE.UU. Nº. de Serie 12/427059 (Expediente Nº. 18643-US) , titulada “Base del Conocimiento Hortícola para la Gestión de Patios y Jardines”; la Solicitud de Patente de EE.UU. Nº. de Serie 12/427076 (Expediente Nº. 18955-US) titulada “Gestión de Uso de Recursos”; la Solicitud de Patente de EE.UU. Nº. de Serie 12/427043 (Expediente Nº. 18641-US) titulada “Sistema y Método para la Gestión de Uso de Recursos”.
Las características, funciones y ventajas pueden lograrse independientemente en varias realizaciones de la presente invención o pueden combinarse en todavía otras realizaciones en las que se pueden ver más detalles con referencia a la siguiente descripción y dibujos.
Descripción breve de los dibujos Las características novedosas que se creen distintivas de las realizaciones ilustrativas se exponen en las reivindicaciones adjuntas. Las realizaciones ilustrativas, sin embargo, así como un modo preferido de utilización, otros objetivos y ventajas de las mismas, serán, mejor comprendidos haciendo referencia a la siguiente descripción detallada de una realización ilustrativa de la presente invención cuando se lea conjuntamente con los dibujos adjuntos, en los que:
La Figura 1 es un diagrama de bloques de un sistema de riego robótico en el que puede implementarse una realización ilustrativa;
la Figura 2 es un diagrama de bloques de un sistema de procesamiento de datos según una realización ilustrativa;
la Figura 3 es un diagrama de bloques de un vehículo de uso general móvil según una realización ilustrativa;
la Figura 4 es un diagrama de bloques de una base de conocimiento hortícola según una realización ilustrativa;
la Figura 5 es un diagrama de bloques de un sistema de sensores según una realización ilustrativa;
la Figura 6 es un diagrama de bloques de una unidad de riego según una realización ilustrativa;
la Figura 7 es un diagrama de flujo que ilustra un proceso para el riego robotizado según una realización ilustrativa; y
la Figura 8 es una diagrama de flujo que ilustra un proceso para la ejecución de un plan de aplicación de una solución de riego según una realización ilustrativa.
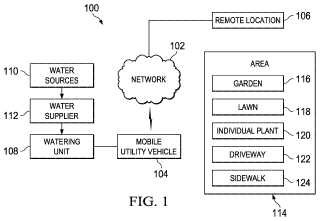
Descripción de la realización preferida La Figura 1 es un diagrama de bloques de un sistema de riego robótico en el que puede implementarse una realización ilustrativa. El sistema de riego robótico 100 puede implementarse en una red de ordenadores en la que las realizaciones ilustrativas pueden implementarse. El sistema robótico 100 contiene la red 102, que es el medio utilizado para proporcionar enlaces de comunicaciones entre varios dispositivos y ordenadores conectados juntos dentro del sistema de riego robótico 100, tales como el vehículo de uso general móvil 104, el lugar distante 106 y la unidad de riego 108. La red 102 puede incluir conexiones, tales como cables, enlaces de comunicación inalámbricos o cables de fibra óptica.
En el ejemplo representado, el vehículo de uso general móvil 104 se conecta a la red 102 en una configuración inalámbrica mientras que el lugar distante 106 tiene una conexión física a la red 102. En otra realización ilustrativa, tanto el vehículo de uso general móvil 104 como el lugar distante 106 pueden conectarse a la red 102 en una configuración inalámbrica. El lugar distante 106 puede ser, por ejemplo, ordenadores personales u ordenadores en red. En un ejemplo ilustrativo, el lugar distante 106 proporciona datos, tales como archivos de inicio, imágenes del sistema operativo y aplicaciones, al vehículo de uso general móvil 104. El vehículo de uso general móvil 104 es un cliente del lugar distante 106 en este ejemplo. La unidad de riego 108 puede integrarse con el vehículo de uso general móvil 104 en una realización ilustrativa, o puede ser capaz de fijarse al vehículo de uso general móvil 104 en otra realización ilustrativa. El sistema de riego robótico 100 puede incluir servidores adicionales, clientes y otros dispositivos que no se muestran.
El sistema de riego robotizado 100 incluye fuentes de agua 110, el suministro de agua 112 y el área 114. Las fuentes de agua 110 son un ejemplo ilustrativo de una fuente de solución de riego que el vehículo de uso general móvil 104 puede aprovechar para proporcionar una solución de riego a un número de plantas en un área, tal como el área 114. Las fuentes de agua 110 pueden incluir fuentes tales como, por ejemplo, sin limitaciones, agua municipal, agua de pozo, agua de embalse y similares. En un ejemplo ilustrativo, las fuentes de agua 110 pueden ser un tanque de agua de lluvia enterrado utilizado para la retención de aguas pluviales. En otra realización ilustrativa, las fuentes de agua 110 pueden ser agua de pozo a la que se accede desde un pozo que es una excavación o estructura creada en el terreno para acceder al agua en acuíferos subterráneos. En una realización ilustrativa, se puede acceder al agua de pozo mediante una bomba sumergible eléctrica o una bomba mecánica utilizada para elevar agua a la superficie. En otro ejemplo ilustrativo,... [Seguir leyendo]
Reivindicaciones:
1. Un método para regar plantas, comprendiendo el método:
responder a la recepción de un mapa de un área (114) , que determina de si el área (114) necesita agua utilizando un sistema de procesamiento (200, 302) ; responder a la determinación de que el área (114) necesita agua identificando las limitaciones actuales; determinar si las limitaciones actuales identificadas permiten el riego en el área (114) utilizando el sistema de procesamiento (200, 302) ; responder a la determinación de que las limitaciones actuales permiten el riego en el área (114) generando un plan de aplicación de solución de riego (338, 422) utilizando el sistema de procesamiento; y ejecutar el plan de aplicación de solución de riego (338, 422) utilizando un vehículo de uso general móvil (104, 300) .
2. El método de la reivindicación 1, en el que las limitaciones actuales se seleccionan de una lista de al menos una de las reglas de riego actuales para un lugar, información de la escasez de agua, restricciones de agua impuestas al lugar y una cantidad de agua actualmente disponible para un vehículo de uso general móvil (104, 300) .
3. El método de la reivindicación 1, en el que generar el plan de aplicación de solución de riego (338, 422) utilizando el sistema de procesamiento (200, 302) comprende además: identificar un suministrador de agua (112) asociado con el vehículo de uso general móvil (104, 300) ; y generar el plan de aplicación de solución de riego (338, 422) que corresponde al suministrador de agua (112) identificado.
4. El método de la reivindicación 3, en el que el suministrador de agua (112) comprende al menos uno de un tanque a
bordo, un tanque remolcado y una manguera. 25
5. El método de la reivindicación 3, en el que ejecutar el plan de aplicación de riego (338, 422) comprende además: vigilar al suministrador de agua (112) ; y determinar si el suministrador de agua (112) se está moviendo con el vehículo de uso general móvil (104, 300) .
6. El método de la reivindicación 5, que comprende además: responder a una determinación de que el suministrador de agua (112) no se está moviendo con el vehículo de uso general móvil (104, 300) , completando el plan de aplicación de solución de riego (338, 422) en consecuencia.
7. El método de la reivindicación 5, que comprende además:
responder a la determinación de que el suministrador de agua (112) se está moviendo con el vehículo de uso general móvil (104, 300) , completando el plan de aplicación de solución de riego (338, 422) .
8. Un sistema para riego autónomo de plantas, comprendiendo el sistema (100) : un controlador de máquina (302) capaz de controlar al menos un vehículo de uso general móvil (104, 300) para ejecutar un plan de aplicación de solución de riego (338, 422) , en el que el controlador de máquina (302) incluye un procesador (324) del generador de luz estructurada; un enlace a una fuente de datos (318, 400, 402, 404, 406) capaz de recibir información (408, 410, 412, 414, 416, 418, 420, 424, 426, 428, 430) sobre las limitaciones actuales; y una unidad de riego (108, 310, 600) conectada a un sistema de procesamiento (200) , en el que el sistema de procesamiento (200) controla la unidad de riego (108, 310,
600) para ejecutar el plan de aplicación de solución de riego (338, 422) , y en el que la unidad de riego (108, 310, 600) está conectada a un suministrador de agua (112) que transporta solución de riego desde una fuente de agua (110) de la solución de riego a la unidad de riego (108, 310, 600) , y en el que el procesador (324) del generador de luz estructurada es capaz de vigilar un trayecto del suministrador de agua (112) mediante la identificación de un lugar actual del suministrador de agua (112) respecto a un lugar actual del vehículo de uso general móvil (104, 300) , y en el que el controlador de máquina (302) identifica un siguiente lugar para el vehículo de uso general móvil (104, 300) y planea una ruta para el siguiente lugar que mantiene el suministrador de agua (112) desplazándose junto con el vehículo de uso general móvil (104, 300) , y en el que el controlador de máquina (302) ajusta el plan de aplicación de solución de agua (338, 422) en respuesta a una determinación mediante el procesador (324) del generador de luz estructurada de que el suministrador de agua (112) no se está desplazando junto con el vehículo 55 de uso general móvil (104, 300) con el fin de resolver un problema que impida al suministrador de agua (112) desplazarse junto al vehículo de uso general móvil (104, 300) .
9. El sistema de la reivindicación 8, en el que la unidad de riego (108, 310, 600) comprende además: un sistema de aplicación de solución de riego (332, 606) ; y un conectador (328, 602) del suministrador de agua, capaz de aplicar solución de riego desde la fuente de agua (110) para ser utilizada por el sistema de aplicación de solución de riego (332, 606) .
10. El sistema de la reivindicación 8, en el que el sistema de aplicación de solución de riego (332, 606) comprende además:
un sistema de tuberías (330, 604) capaz de conducir solución de riego a través del sistema de aplicación de solución de riego (332, 606) ; y un sistema de presión capaz de forzar solución de riego a través del sistema de tuberías (330, 604) .
11. El sistema de la reivindicación 8; en el que sistema de aplicación de solución de riego (332, 606) comprende al
menos uno de un aspersor de pauta fija, un cabezal de pulverización, una boquilla, un aspersor de impacto, un 5 aspersor oscilante, un aspersor pulsante y una espita.
12. El sistema de la reivindicación 8; en el que el suministrador de agua (112) comprende al menos uno de un tanque a bordo, un tanque remolcado y una manguera.
13. El sistema de la reivindicación 8, que comprende además: un sistema de sensores (312, 500) capaz de detectar información acerca del área (114) .
14. El sistema de la reivindicación 8, que comprende además:
un dispositivo de comunicación (314) capaz de recibir entradas desde un número de sensores (502, 504, 506, 508, 15 510, 512, 514, 516, 518, 520, 522, 524) .
15. El sistema de la reivindicación 8, en el que el enlace a la fuente de datos (318, 400, 402, 404, 406) recibe un mapa referenciado geográficamente de un entorno operativo del vehículo de uso general móvil (104, 300) que identifica una multitud de diferentes lugares etiquetados dentro del entorno operativo, y en el que el controlador de máquina (302) determina si un lugar etiquetado en la multitud de diferentes lugares etiquetados requiere la aplicación de solución de riego basándose en el etiquetado que se encuentra en el mapa referenciado geográficamente.
16. El sistema de la reivindicación 8, en el que las limitaciones actuales identifican restricciones de agua impuestas a un lugar específico que incluye un entorno operativo del vehículo de uso general móvil (104, 300) , y en el que el
controlador de máquina (302) determina si las restricciones de agua permiten la aplicación de la solución de riego dentro del entorno operativo.
Patentes similares o relacionadas:
Sensores de pista para detectar la posición del vehículo con respecto a las pistas, del 15 de Julio de 2020, de Autostore Technology AS: Un método para rastrear la posición de un vehículo operado remotamente siguiendo una ruta establecida en relación con las pistas establecidas en una estructura de marco que forma […]
Un aparato, método y programa informático para habilitar la carga de un vehículo, del 15 de Julio de 2020, de Nokia Technologies OY: Un método que comprende: obtener información de un vehículo alimentado por energía solar, en el que la información comprende al […]
Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática, del 1 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática dentro de un entorno, en el que el aparato de limpieza limpia una superficie […]
Robot móvil autónomo para ejecutar asignaciones de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, del 1 de Julio de 2020, de OMRON CORPORATION: Un robot móvil para ejecutar una asignación de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, comprendiendo […]
Procedimiento de limpieza temporizada, dispositivo y medio de almacenamiento, del 17 de Junio de 2020, de Beijing Xiaomi Mobile Software Co., Ltd: Un procedimiento de limpieza temporizada que comprende: obtener un mapa topográfico de una región de limpieza, en el que el mapa […]
Conjunto compuesto por un sistema de alimentación en tierra y un vehículo eléctrico, del 17 de Junio de 2020, de ALSTOM Transport Technologies: Conjunto formado por un sistema de alimentación en tierra y un vehículo eléctrico , el sistema de alimentación en tierra es del […]
Procedimiento para el control de una unidad de luz de una iluminación exterior de automóvil, automóvil, dispositivo externo al vehículo y sistema, del 17 de Junio de 2020, de AUDI AG: Procedimiento para el control de al menos una unidad de luz de una iluminación exterior de automóvil de un primer automóvil (10a, 10b, 10c) en una columna de vehículos […]
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]