Sistema de tratamiento para tratar una pieza móvil.
Sistema de tratamiento (10) para tratar una pieza móvil (12) por medio de un robot industrial (16),
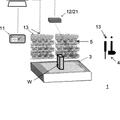
que puede acoplarse rígidamente, de forma intermitente, a la pieza (12) y/o a una unidad portapieza móvil (14), en el que el robot industrial (16) está en la posición operativa desacoplada (42) soportado por un dispositivo portador (18), que puede moverse por medio de una unidad de tracción que actúa con tracción activa (20) independientemente de la pieza, y está en la posición operativa acoplada (44) montado de forma flotante con respecto al dispositivo portador (18) por medio de un sistema de alojamiento flotante (22), caracterizado por que
una unidad de control (36) del robot industrial (16) y/o al menos una unidad de producción (49) se sitúan adicionalmente en el dispositivo portador (18), en el que la unidad de tracción (10) no actúa con tracción activa sobre el dispositivo portador (18) en la posición operativa acoplada (44) del robot industrial (16) y el dispositivo portador (18) se desplaza al menos intermitentemente de forma concomitante por la pieza móvil (12) y/o por la unidad portapieza móvil (14) por medio del sistema de alojamiento flotante (22).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2007/001262.
Solicitante: DAIMLER AG.
Nacionalidad solicitante: Alemania.
Dirección: Mercedesstrasse 137 70327 Stuttgart ALEMANIA.
Inventor/es: HABISREITINGER, UWE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B23P21/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23P OTROS PROCEDIMIENTOS PARA EL TRABAJO DEL METAL NO PREVISTOS EN OTRO LUGAR; OPERACIONES MIXTAS; MAQUINAS HERRAMIENTAS UNIVERSALES (dispositivos para el copiado o el control B23Q). › Máquinas para el montaje de numerosas piezas diferentes destinadas a componer conjuntos, con o sin trabajo de estas piezas antes o después de su montaje, p. ej. por control programado.
- B25J5/02 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 5/00 Manipuladores montados sobre ruedas o sobre soportes móviles (B25J 1/00 tiene prioridad; manipuladores de control programado B25J 9/00). › que se desplazan sobre un camino-guía.
- B25J9/00 B25J […] › Manipuladores de control programado.
- B62D65/02 B […] › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 65/00 Diseño, fabricación, p.ej. ensamblado o medidas encaminadas a facilitar el desensamblaje o la modificación estructural de vehículos de motor o remolques, no previstos en otro lugar. › Ensamblaje o desensamblaje de subconjuntos o componentes, posicionado de subconjuntos o componentes a la carrocería o a otros subconjuntos o componentes.
PDF original: ES-2536754_T3.pdf
Fragmento de la descripción:
Sistema de tratamiento para tratar una pieza móvil.
La invención se refiere a un sistema de tratamiento para tratar una pieza móvil por medio de un robot industrial que puede acoplarse rígidamente, de forma intermitente, a la pieza y/o a una unidad portapieza móvil, transportándose el robot industrial, cuando se encuentra en una posición operativa desacoplada, por un dispositivo portador que es móvil, independientemente de una pieza, por medio de una unidad de tracción que actúa con tracción activa, y, cuando está en una posición operativa acoplada, montándose de forma flotante con respecto al dispositivo portador por medio de un sistema de alojamiento flotante, de acuerdo con el preámbulo de la reivindicación 1.
Se conocen en la técnica sistemas de tratamiento y procedimientos del tipo indicado al principio. Por ejemplo, el documento DE103 13 463 B3 da a conocer un procedimiento y un dispositivo para realizar una operación de trabajo en una pieza móvil por medio de un robot industrial desplazado concomitantemente en sincronía. El robot industrial desplazado concomitantemente avanza durante toda la fase de trabajo, es decir, en un estado acoplado a la pieza, por término medio a la velocidad del dispositivo de transporte que mueve la pieza. Para este fin, la velocidad de transporte medida en el dispositivo de transporte se introduce como una velocidad de consigna en un regulador de velocidad, y se impone al accionamiento de un bastidor desplazable del robot industrial.
Además, el documento US 4 627 158 A describe un sistema de tratamiento para el montaje de una puerta en un carrocería de un vehículo. Este comprende un robot industrial, que es desplazable a lo largo de la línea de montaje y que recoge la puerta, la transporta y la monta en la carrocería.
La invención tiene el objetivo de proporcionar un sistema de tratamiento alternativo del tipo indicado al principio.
El objetivo se consigue mediante un sistema de tratamiento que tiene las características de la reivindicación 1. El sistema de tratamiento de acuerdo con la invención se distingue en que una unidad de control del robot industrial y/o al menos una unidad de producción se disponen adicionalmente en el dispositivo portador. Además, en una posición operativa acoplada del robot industrial, la unidad de tracción no actúa con tracción activa sobre el dispositivo portador y el dispositivo portador se desplaza concomitantemente, al menos intermitentemente, por la pieza móvil y/o por la unidad portapieza móvil, por medio del sistema de alojamiento flotante.
En este caso, por "robot industrial que puede acoplarse" se entiende un robot industrial que, con respecto a su base -o su unidad portadora -puede acoplarse a una pieza, pudiendo realizarse los movimientos de trabajo del robot 35 industrial independientemente del sistema de acoplamiento usado. Por lo tanto, el sistema de tratamiento incluye una unidad de tracción que es independiente de una pieza, para desplazar el robot industrial desacoplado independientemente de una pieza. Cuando el robot industrial se acopla a la pieza móvil y/o a la unidad portapieza móvil, el dispositivo portador se arrastra concomitantemente, por medio del sistema de alojamiento flotante interpuesto, mediante el robot industrial que ahora se desplaza concomitantemente con la pieza móvil. En esta posición operativa acoplada del robot industrial, por lo tanto, la unidad de tracción no actúa con tracción activa sobre el dispositivo portador y, por lo tanto, sobre el robot industrial.
De esta manera, es posible crear un sistema de tratamiento prácticamente autónomo con respecto a su entorno. Aquí, si es apropiado, el dispositivo portador puede realizarse en forma de una plataforma.
Además, ya no hay necesidad de elaborados sistemas de control de retroalimentación para la adaptación del movimiento del robot industrial con respecto a la pieza móvil. La pieza puede ser, por ejemplo, una carrocería del vehículo, o también otras piezas, en particular aquellas que se van a producir o montar en el marco de una producción en serie.
La unidad de producción puede ser ventajosamente otro robot industrial y/o un portador de carga y/o una unidad de tratamiento. Además, la unidad de producción puede realizarse como un módulo intercambiable y/o expandible. La unidad portadora en este caso puede realizarse como un módulo intercambiable y/o expandible. El sistema de tratamiento es particularmente adecuado para realizar tareas de tratamiento complejas y/o distintas en el marco de 55 una producción en serie o de un montaje en serie.
Ventajosamente, el dispositivo portador tiene una unidad portadora flotante para desplazar el robot industrial con una fricción reducida. La unidad portadora flotante en este caso puede realizarse en forma de una unidad de cojín de aire. El movimiento del dispositivo portador con fricción reducida hace posible, en una posición operativa acoplada,
una operación de arrastre imperturbable, reproducible de forma precisa del robot industrial que desplaza concomitantemente el dispositivo portador.
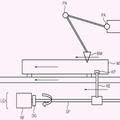
De acuerdo con una realización preferida, la unidad de tracción se realiza como un sistema de rueda de fricción, en particular un sistema de rueda de fricción que puede activarse y que incluye al menos una rueda de fricción, que se conecta o puede conectarse a un sistema de guía proporcionado para el dispositivo portador. El sistema de guía puede ser, por ejemplo, uno o más rieles guía, que pueden montarse con una facilidad relativa en un taller. Un sistema de rueda de fricción es particularmente adecuado para el movimiento, o desplazamiento, definido del dispositivo portador, que puede moverse sobre el subsuelo con una fricción reducida por medio de la unidad portadora flotante, o la unidad de cojín de aire. El movimiento en este caso es un movimiento cuya dirección se define por el sistema de guía.
El dispositivo portador puede tener una plataforma, a la que se conecta rígidamente el robot industrial cuando está en una posición operativa desacoplada y se conecta de forma flotante cuando está en una posición operativa 15 acoplada. El robot industrial puede conectarse así a la plataforma en una manera posicionalmente definida cuando está en una posición operativa desacoplada, mientras que se dispone flotante con respecto a la plataforma cuando está en una posición operativa acoplada, de tal forma que no puede transferirse ninguna fuerza perturbadora (posiblemente fuerzas de reacción) de la plataforma a la pieza acoplada al robot industrial. En cada posición operativa del robot industrial, por lo tanto, se asegura una conexión (rígida o flotante) entre el robot industrial y el dispositivo portador que es favorable con respecto al posicionamiento, o el tratamiento.
El robot industrial está conectado a la plataforma preferiblemente a través de un sistema de compensación de altura interpuesto, en particular conmutable. El sistema de compensación de altura sirve para compensar, en una manera tan automática como sea posible, tolerancias que se producen posiblemente del robot industrial acoplado en la dirección Z (dirección de la altura) con respecto a la plataforma. Dichas tolerancias de altura pueden producirse, por ejemplo, debido al movimiento flotante del dispositivo portador o debido a inexactitudes posicionales en el caso de la pieza móvil.
De acuerdo con una posible variante de realización, la plataforma puede portarse por la unidad portadora flotante con una fuerza de movimiento reducida. Una plataforma es particularmente idónea para la realización de un movimiento sobre el subsuelo con una fricción reducida, en particular por medio de una unidad de cojín de aire, y hace posible adicionalmente una disposición flexible de un robot industrial montado de forma flotante que tiene un sistema de compensación de altura conmutable, así como, posiblemente, dispositivos funcionales adicionales para el tratamiento de piezas. En este caso, en una posición operativa acoplada, el robot industrial puede conectarse de forma flotante a la plataforma por medio de un sistema de cojín de aire. En una posición operativa desacoplada, por el contrario, el robot industrial, con el alojamiento flotante desactivado, puede conectarse rígidamente, y de este modo en una manera posicionalmente definida, a la plataforma.
Ventajosamente, el robot industrial tiene una unidad de compensación de peso, que, en dependencia de un movimiento del robot industrial, puede ponerse en una posición de compensación apropiada, en particular a través de un movimiento de traslado, por medio de una unidad de control del robot industrial. La unidad de compensación de peso puede incluir, por ejemplo elementos de peso apropiadamente desplazables... [Seguir leyendo]
Reivindicaciones:
1. Sistema de tratamiento (10) para tratar una pieza móvil (12) por medio de un robot industrial (16) , que puede acoplarse rígidamente, de forma intermitente, a la pieza (12) y/o a una unidad portapieza móvil (14) , en el que el robot industrial (16) está en la posición operativa desacoplada (42) soportado por un dispositivo portador (18) , que puede moverse por medio de una unidad de tracción que actúa con tracción activa (20) independientemente de la pieza, y está en la posición operativa acoplada (44) montado de forma flotante con respecto al dispositivo portador (18) por medio de un sistema de alojamiento flotante (22) , caracterizado por que una unidad de control (36) del robot industrial (16) y/o al menos una unidad de producción (49) se sitúan adicionalmente en el dispositivo portador (18) , en el que la unidad de tracción (10) no actúa con tracción activa sobre el dispositivo portador (18) en la posición operativa acoplada (44) del robot industrial (16) y el dispositivo portador (18) se desplaza al menos intermitentemente de forma concomitante por la pieza móvil (12) y/o por la unidad portapieza móvil (14) por medio del sistema de alojamiento flotante (22) .
2. Sistema de tratamiento de acuerdo con la reivindicación 1, caracterizado por que la unidad de producción (40) es un robot industrial adicional y/o un portador de carga y/o una unidad de tratamiento.
3. Sistema de tratamiento de acuerdo con la reivindicación 1 o 2, caracterizado por que la unidad de producción (40) está diseñada como un módulo intercambiable y/o expandible.
4. Sistema de tratamiento de acuerdo con cualquiera de las reivindicaciones 1 a 3, caracterizado por que el dispositivo portador (18) está diseñado como un módulo intercambiable y/o expandible.
5. Sistema de tratamiento de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado por que el dispositivo portador (18) comprende una unidad portadora flotante (24) para mover el robot industrial (16) con una 30 fricción reducida.
6. Sistema de tratamiento de acuerdo con la reivindicación 5, caracterizado por que la unidad portadora flotante (24) está diseñada como un unidad de cojín de aire (26) . 35
7. Sistema de tratamiento de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado por que la unidad de tracción (20) está diseñada como un sistema de rueda de fricción activable en particular que comprende al menos una rueda de fricción que se conecta o puede conectarse a un sistema de guía (54) proporcionado para el 40 dispositivo portador (18) .
8. Sistema de tratamiento de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado por que el dispositivo portador (18) comprende una plataforma (30) , a la que se conecta rígidamente el robot industrial (16) 45 en la posición operativa desacoplada (42) y de forma flotante en la posición operativa acoplada.
9. Sistema de tratamiento de acuerdo con la reivindicación 8, caracterizado por que el robot industrial (16) está conectado a la plataforma (30) con la interposición de un sistema de compensación de 50 altura conmutable en particular (46) .
10. Sistema de tratamiento de acuerdo con la reivindicación 8 o 9, caracterizado por que la plataforma (30) se soporta por la unidad portadora flotante (24) con una fuerza de movimiento reducida. 55
11. Sistema de tratamiento de acuerdo con cualquiera de las reivindicaciones 8 a 10, caracterizado por que el robot industrial (16) se conecta de forma flotante a la plataforma (30) por medio de un sistema de cojín de aire (32) en la posición operativa acoplada (44) .
12. Sistema de tratamiento de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado por que el robot industrial (16) comprende una unidad de compensación de peso (34) , puede ponerse en una posición de 5 compensación adecuada en dependencia de un movimiento del robot industrial (16) por medio de una unidad de control (36) del robot industrial (16) , en particular en el transcurso de un movimiento de traslado.
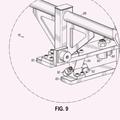
13. Sistema de tratamiento de acuerdo con cualquiera de las reivindicaciones anteriores, caracterizado por que comprende un dispositivo de acoplamiento (66) conectado al robot industrial (16) por medio de una unidad de alojamiento flotante activable (72) .
14. Sistema de tratamiento de acuerdo con la reivindicación 13, caracterizado por que el dispositivo de acoplamiento (66) se conecta al robot industrial (16) de una manera dinámicamente rígida en la posición operativa acoplada (44) y flotante en la posición operativa desacoplada (42) .
15. Sistema de tratamiento de acuerdo con la reivindicación 13 o 14, caracterizado por que el dispositivo de acoplamiento (66) comprende un sistema de conexión (84) para establecer una conexión a la unidad portapieza móvil (14) y un sistema de agarre (80) para establecer una conexión a la pieza móvil (12) .
Patentes similares o relacionadas:
 Puesto de mecanizado, del 25 de Septiembre de 2019, de HOMAG GmbH: Puesto de mecanizado, en particular puesto de trabajo de montaje, en el que pueden ejecutarse operaciones de mecanizado manuales y/o parcialmente automatizadas, en particular […]
Puesto de mecanizado, del 25 de Septiembre de 2019, de HOMAG GmbH: Puesto de mecanizado, en particular puesto de trabajo de montaje, en el que pueden ejecutarse operaciones de mecanizado manuales y/o parcialmente automatizadas, en particular […]
Instalación de fabricación y procedimiento de fabricación, del 4 de Septiembre de 2019, de KUKA SYSTEMS GMBH: Planta de fabricación para piezas de trabajo , especialmente para componentes de carrocería, presentando la instalación de fabricación una zona de fabricación con […]
Línea de fabricación provista de uno o varios módulos para transportar recipientes para suministrar piezas o componentes a puestos de montaje a lo largo de la línea, del 21 de Agosto de 2019, de COMAU S.P.A.: Línea de fabricación , que comprende: - como mínimo un puesto de montaje , - un dispositivo transportador de cadena que comprende una cadena […]
 Dispositivo y procedimiento para la sincronización del movimiento de un medio de mecanizado automático con el movimiento de una pieza de trabajo, del 31 de Julio de 2019, de SIEMENS AKTIENGESELLSCHAFT: Dispositivo para la sincronización del movimiento de un medio de mecanizado automático (BM) con el movimiento de una pieza de trabajo (WS) transportada durante el mecanizado […]
Dispositivo y procedimiento para la sincronización del movimiento de un medio de mecanizado automático con el movimiento de una pieza de trabajo, del 31 de Julio de 2019, de SIEMENS AKTIENGESELLSCHAFT: Dispositivo para la sincronización del movimiento de un medio de mecanizado automático (BM) con el movimiento de una pieza de trabajo (WS) transportada durante el mecanizado […]
 Sistema de transporte flexible, del 31 de Mayo de 2019, de Kuka Systems North America LLC: Sistema de transporte flexible para la fabricación de líneas de montaje, que comprende:
- un raíl que transporta piezas;
- un elemento […]
Sistema de transporte flexible, del 31 de Mayo de 2019, de Kuka Systems North America LLC: Sistema de transporte flexible para la fabricación de líneas de montaje, que comprende:
- un raíl que transporta piezas;
- un elemento […]
Sistema integrado de entrega y construcción de piezas de vehículo, del 14 de Mayo de 2019, de Comau LLC: Un procedimiento para proporcionar una entrega de piezas coordinada para su uso en una secuencia de construcción aleatoria predeterminada en líneas de montaje […]
Sistema y procedimiento de montaje guiado por luz, del 20 de Marzo de 2019, de OPS Solutions, LLC: Un método para proyectar indicadores visuales sobre un objeto físico para guiar las acciones de un individuo, comprendiendo dicho método: […]
Línea de producción, del 21 de Febrero de 2019, de COMAU S.P.A.: Línea de producción que comprende: - al menos una estación de ensamblaje , - un dispositivo transportador de cadena que comprende una cadena […]