SUBMARINO - AVION.
El Submarino-Avión, es una nave que puede viajar por el fondo de los mares,
a la vez que puede elevarse sobre las aguas, utilizando para ello el mismo motor y el mismo sistema de propulsión de fluidos. Este Submarino-Avión tiene unas alas (2) que favorecerán la sustentación y un sistema de propulsión (26-33), que se multiplica a sí mismo todo lo que permitan sus dimensiones, partiendo del empuje de un solo motor eléctrico (16), o, de unos pedales (35).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201001344.
Solicitante: PORRAS VILA,F. JAVIER.
Nacionalidad solicitante: España.
Inventor/es: PORRAS VILA,F. JAVIER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60F5/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60F VEHICULOS RAIL-CARRETERA; VEHICULOS CAPACES DE DESPLAZARSE EN O SOBRE MEDIOS DIFERENTES, p. ej. VEHICULOS ANFIBIOS (vehículos de colchón de aire B60V). › B60F 5/00 Otros vehículos capaces de desplazarse en o sobre medios diferentes (vehículos utilizando alternativamente patines y ruedas B62B 13/18; hidroaviones de casco o de flotadores B64C 35/00). › transformables en avión.
- B63G8/00 B […] › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63G INSTALACIONES OFENSIVAS Y DEFENSIVAS EN LOS BUQUES; COLOCACION DE MINAS; DRAGADO DE MINAS; SUBMARINOS; PORTAAVIONES (medios de ataque o de defensa en general, p. ej. torretas, F41H). › Embarcaciones sumergibles, p. ej. submarinos (cascos de submarinos B63B 3/13; cámaras de buceo unidas mecánicamente a una base, p. ej. mediante un cable B63C 11/34; artefactos automotores de buceo B63C 11/46; torpedos F42B 19/00).
Fragmento de la descripción:
SUBMARINO-AVION
OBJETIVO DE LA INVENCIÓN
El objetivo de la presente invención es el de poder crear un Submarino que pueda funcionar, al mismo tiempo, como un Avión. El sistema de propulsión será el mismo en los dos casos porque sus motores (4) , Ó, (16) , o, sus pedales (35) , dan el primer empuje a un sistema (4-12) , que mueve un fluido, que puede ser, o bien agua, o bien, aire. Este Submarino-Avión tiene, también, un sistema formado por Grupos de Tubos Aceleradores de Fluidos, (GTAF) , que se multiplica a sí mismo varias veces, de manera que la fuerza del fluido se renueva en cada ocasión en que se n~plica el sistema, y, así, las salidas del fluido por los últimos Conotubos (22) de cada (GTAF) , se van a multiplicar tantas veces como lo permitan las dimensiones de la nave, y, en cada una de estas salidas, la fuerza del fluido será la misma, habiendo comenzado el empuje con un solo motor eléctrico (16) , o, con unos simples pedales de bicicleta (35) .
ANTECEDENTES DE LA INVENCIÓN
Los únicos antecedentes que tiene la invención son los Submarinos de Monturiol e Isaac Peral, a los que se añade un sistema de propulsión de fluidos que le permiten viajar en dos medios tan distintos como son el agua y el air, e. Nada nuevo se aporta a los Submarinos de estos dos inventores españoles en lo que se refiere a todos los mecanismos y sistemas que le permiten funcionar como un Submarino. Lo que cambia es el sistema que le permite remontar altura y elevarse sobre las aguas. Para esto, el motor que utiliza este Submarino-Avión, no tiene unas hélices en la popa que lo empujan hacia delante, sino que tiene un sistema de propulsión de fluidos formado por un motor eléctrico (4) y unas hélices (5) , que empujan el agua hacia un (GTAF) , lo que multiplica mucho la fuerza que le imprimen al agua sus hélices (5) . De esta manera, el agua, lO, el aire, saldrá por la salida (12) con mucha fuerza, empujando hacia delante al Submarino-Avión. De otra manera, si el último Conotubo (9, 10) de este (GTAF) , se dobla ha, cia abajo, se puede dirigir el fluido hacia una tobera vertical (11) que lo enviará hacia abajo con mucha fuerza, haciendo que el Submarino-Avión se eleve hacia las alturas.. Este sistema de propulsión se puede multiplicar varias veces a todo lo ancho del Submarino, de manera que se pueden poner varios (GTAF) , lo que asegura el movimiento de avance de la nave.
DESCRIPCIÓN DE LA INVENCIÓN
El Submarino-Avión, es una nave que puede viajar en dos medios de fluidos tan distintos como son el agua o el aire. Para esto utilizará el mismo sistema de propulsión que está formado por un Grupo de Tubos Aceleradores de Fluidos (GT AF) que multiplican mucho la fuerza del fluido que los recorre por su interior. El sistema más simple, -tal como se aprecia en la figura nO 2-, parte de un tubü (7) en el que entra el fluido, -sea el agua o el aire-, por la abertura (6) de uno de sus extremos. En la parte central, un motor eléctrico (4) , con unas hélices (5) , remueven el fluido y lo hacen atravesar un (GTAF) que puede desembocar en la salida horizontal (12) del tubo (7) . También, el último Conotubo (9, 10) puede doblar hacia abajo su Cono largo (10) Y dirigir el fluido hacia una tobera de salida vertical (11) que dirigirá el fluido hacia abajo. para favorecer así el despegue en vertical. Aquí hay que tener en cuenta que los Conotubos (9, 10) del (GTAF) van a ser los encargados de multiplicar mucho la fuerza que las hélices (5) de los motores (4) van a imprimir al fluido. Por lo demás, el Submarino-Avión, va a llevar, como es lógico e imprescindible, el sistema típico de los Submarinos que les permite sumergirse en el fondo de los océanos. Me refiero al mecanismo que hace entrar el agua por la entrada (l3) del tubo (15) que la mantendrá allí mientras ell Submarino se halle bajo el agua, y, la sacará de nuevo del tubo (15) cuando quiera elevars (~ hacia la superficie. Se añade, en la figura n° 3, un sistema múltiple de propulsión de fluidüs, que se puede añadir, o, que puede sustituir al que acabo de describir. Se trata de un sist'ema que puede partir, o bien de un único motor eléctrico (16) , o bien, de unos pedales (35) . Las hélices (19, 42) que mueven estos dos mecanismos, se instalan en el interior de un embudo (20, 34) que se dirige hacia un (GTAF) en el que, su último Conotubo (22) bifurca su salida en dos partes. La primera salida (23) dirige el aire hacia atrás, con lo que empujaría hacia delante a la nave. La otra bifurcación (24) dirige sólo una parte del aire que había llegado al Cono largo (22) , -ya con mucha fuerza-, hacia un tubo semicircular (25) , -q[ue tiene en su interior unos Conos Internos (43) , iguales que Jos que tienen los Conotubos el) , 10) en su interior-o Este tubo semicircular (25) se dirige hacia atrás y desemboca en unas cuñas de aire (28) que se sitúan alrededor de un eje de giro, en el que hay una rueda dentada (29) . Esta rueda dentada moverá a otra rueda dentada pequeña (33) que será la rueda que hay en el extremo del eje de unas segundas hélices (19) , situadas en el interior de un segundo emb~do (20) , que también se conecta a otro (GTAF) , en donde, de nuevo, la fuerza del fluido se va a multiplicar mucho en sus Conotubos (9, 10) . Por segunda vez, en el último de estos Conotubos (9, 10) podemos hacer que funcione como una salida simple, o bien, podemos hacer que funcione como el Cono largo (22) que hemos descrito antes, que se bifurcaba en dos partes (23, 24) , lo que enviaría al fluido hacia otro tubo semicircular como el (25) , hacia otras cuñas de aire (28) , etc... Como la fuerza del fluido en el Cono largo (22) es muy grande, podemos utilizar una parte de esa fuerza para hacer que mueva las cuñas de otras hélices (19) , y, esto lo podremos hacer siempre en el último Cono largo del último Conotubo (22) . Por lo tanto, tenemos así un sistema que se multiplica a sí mismo todo lo que se quiera, o, todo lo que lo permitan las dimensiones de la nave. Mientras se viaja por el fondo del mar, o, bien, cuando ya se está en el aire, se puede sustituir el motor eléctrico (16) por el empuje de unos pedales (35) , tal como se observa en la figura n° 3. El aire que removerán sus hélices (42) se dirige hacia el embudo (34) que se conecta con el embudo (20) en el extremo de salida. En esta tobera de salida hay una tapadera que pivota (21) sobre un eje, que deja pasar el aire que le llega, bien por un embudo (20) , o bien por el otro embudo (34) . El (GTAF) que se conecta a continuación se encargará de multiplicar mucho la fuerza de este aire, con lo que el empuje estará así asegurado. Los Conotubos (9, 10) se pueden poner tal como se observa en esta figura n° 3, y, también se pued, en poner al revés, como se ven en la figura n°
4. En este caso, también los Conos Internos (43) habrá que ponerlos al revés, o sea, haciendo que el fluido entre por el vértice dell Cono largo (10) , el que se halla en la parte derecha de la figura nO 4 , y, que salga por lt;el vértice del Cono corto (9) , el de la parte izquierda de la figura. Esta disposición parece ser un poco más potente que la anterior. Fechas de la invención: (03-05) 09.10) .
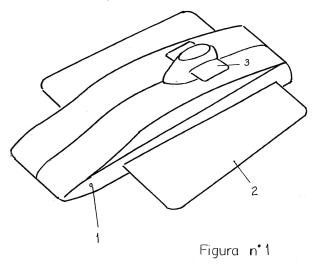
DESCRIPCIÓN DE LAS FIGURAS Figura n° I: Vista en perspectiva del Submarino-Avión en el que se apreCIan sus elementos externos, el fuselaje (1) , las alas (2) y los estabilizadores (3) .
Figura n° 2: Vista en planta del mecanismo básico de los motores (4) , con sus hélices (5) , situadas en un tubo (7) por el que entra el fluido, sea el agua o el aire. Las hélices (5) conducen el fluido hacia el primer tubo en forma de Cono (8) de un Grupo de Tubos Aceleradores de Fluidos (9, 10) , - (GTAF) -, que desembocan, bien en una salida (12) del tubo (7) , o bien en una tobera (11) que se dirige hacia abajo para que la reacción del movimiento del fluido eleve al Submarino-Avión hacia arriba.
Figura nO 3: Vista en planta del sistema múltiple que puede hacer que el SubmarinoAvión funcione con un solo motor (16) , o, con unos simples pedales, (35) . Ambos sistemas pueden mover por separado sus respectivas hélices ' (19, 42) Y el fluido al que remueven se envía por un embudo (20, 34) , hacia el (GTAF) que se bifurca en el último Conotubo (22) en dos salidas. Una de ellas, la salida (23) , dirige el fluido en el mismo sentido que llevaba y lo extrae de) (GTAF) . La otra salida (24) diirige al fluido hacia un tubo (25) que se dobla en semicírculo, y, hacia atrás, de manera que puede dirigir el fluido hacia un juego de cuñas de aire (28) , -situadas a la misma altura que las hélices (19) anteriores-, que tienen una rueda dentada (29) , que va a mover, -mediiante otra rueda dentada (31) de su mismo diámetro-, a una rueda dentada pequeña (33) del eje de otras hélices (19) , como las que movía el motor (16)...
Reivindicaciones:
1) Submarino-Avión, caracterizado por ser una nave que puede viajar por el mar y por el
aire utilizando para ello el mismo sistema de propulsión de fluidos. Su aspecto exterior es el de un Submarino (1) al que se le afiaden lmas alas (2) y unos estabilizadores (3) . En ambos laterales, este Submarino llevará dos tubos (15) con el sistema interno de inmersión típico de los Submarinos de Monturiol y Peral. En su forma más simple, el Sistema de Propulsión de Fluidos que ejerce el empuje, está formado por un tubo (7) , -abierto por sus dos extremos (6) -, en cuyo centro instalamos lm motor eléctrico (4) con unas hélices (5) de palas anchas, que se extienden en perpendicullar sobre su eje de giro. Por delante de estas hélices (5) ponemos un Cono (8) que es el primer elemento de un Grupo de Tubos Aceleradores de Fluidos, (GTAF) , formado por muchos Conotubos (9, 10) . Estos Conotubos (9, 10) están formados, a su vez, por un Cono Corto (9) , que une su base abierta a la base de un Cono Largo (10) . En el interior de estos Conotubos (9, 10) , situamos unos Conos Internos (43) que se hallan encerrados en un Cilindro (45) que se estrecha en el
extremo del vértice del Cono Interno (43) . Unas varillas (44) permiten fijar en su posición a este Cilindro (45) con su Cono Interno (43) . En el interior del Conotubo (9, 10) , se añade un conjunto de Conos Internos (43) . Si los ponemos formando una cruceta, o, una estrella,
cabrán muchos Conos Internos (43) . Por otra parte, estos Conos Internos (43) los vamos a poner en los dos sentidos, de la misma manera que ponemos en los dos sentidos a los Conbtubos (9, lOF Por lo tanto, la orientación de los Conos Internos (43) deberá ser
coherente con la dirección y sentido del fluido. El último Conotubo (9, lO) de cada (GTAF) , dirigirá el fluido, bien en horizontal, hacia la salida (12) del tubo (7) , o bien, el
Cono Largo (10) de ese último Conotubo (9, 10) , se puede doblar hacia abajo y dirigirse hacia una tobera vertical (11) . El mecanismo que permite conmutar la salida en horizontal
del fluido', con la salida en vertical, es un dispositivo que acerca o aleja un segmento de tubo cilíndrico semicircular hacia el Cono Largo (10) de este último Conotubo, (9, 10) .
2) Submarino-Avión, -según reivindicación primera-, caracterizado por el Sistema de Propulsión Múltiple que sustituye al Sistema de Propulsión descrito anteriormente. Este Sistema de Propulsión Múltiple, está basado, bien en un solo motor eléctrico (16) , o bien,
en unos pedales (35) . Describiré, en primer lugar, el que se basa en el motor eléctrico (16) ,
y, después, el Grupo de Tubos Aceleradores die Fluidos que se situará en las dos variantes.
, Tenemos, por tanto, dos embudos (20) y (34) que se conectan en la misma tobera estrecha de salida. En esta tobera hay una tapadera pivotante (21) . En cada embudo (20, 34) hemos puesto unas hélices distintas (19) y (42) . En ell embudo (20) ponemos unas hélices (19) , -de palas perpendiculares al eje de giro-, conectadas a la rueda dentada de un motor eléctrico
(16) . Los dos embudos (20, 34) están cone:ctados, -por el extremo estrecho-, al mismo Grupo de Tubos Aceleradores de Fluidos, (GTAF) , que está fonnado por un conjunto 10
extenso de Conotubos (9, 10) . El ultimo Conotubo (22) de este (GTAF) está bifurcado en dos partes. Una de ellas es más ancha (23) . La otra salida es mucho más estrecha (24) , y se conecta con un tubo (25) que se dobla en semicírculo y vuelve hacia atrás en un tubo largo15
(26) que también está lleno, -como los Conotulbos (9.
10. , de muchos Conos Internos (43) .
El extremo de salida (27) del tubo (26) se pone delante de unas cuñas huecas de aire, (28) , 20
situadas en un eje que tiene una rueda dentada (29) que se articula a un rodamiento (30) . Esta rueda dentada (29) se conecta con otra rueda dentada (31) de su mismo diámetro, la que, a su vez, se conecta a la rueda dentada ¡pequeña (33) del eje de las segundas hélices 25 (19) del sistema múltiple, las que estarán, también, encerradas en un segundo embudo (20) , conectado a un segundo (GTAF) . En el t~xtremo de salida de este segundo (GTAF)
podemos hacer, también, que su último Conotubo (22) se pueda bifurcar en otras dos partes. Si no se bifurca, el último Conotubo (9, 10) será como los demás. Pero, si se bifurca en dos parles, · el sistema ~~ replicará igual que el que acabo de describir en el extremo de salida bifurcado del primer (GTAF) , con lo que podremos conseguir unas terceras hélices (19) , con un tercer embudo (20) y un tercer (GTAF) , que, en su extremo de salida, podrá,
también, bifurcar, Q no, el último tubo (22) . Y, si lo bifurca, podremos conseguir unas cuartas hélices (19) , con un cuarto embudo, un cuarto (GTAF) , etc... Según sean las dimensiones de la nave, podremos multiplicar todo lo que queramos este sistema.
3) Submarino-Avión, -según reivindicación segunda-, caracterizado por ser una variante del sistema de empuje, en la que las hélices (42) del embudo (34) están movidas por el 50 engranaje de un mecanismo de bicicleta (35-41) , que comienza con unos pedales (35) , una correa de transmisión (36) , y, unas ruedas dentadas (37-40) que se conectan con la rueda pequeña (41) de las hélices (42) . Los dos sistemas de empuje descritos, el que comienza con un motor eléctrico (16) y el que comienza con unos pedales de bicicleta (35) , pueden ser bien independientes, o bien, pueden situarse el uno al lado del otro. Sus embudos respectivos (20) y (34) estarán unidos en su estrechamiento, -en donde habrá una placa pivotante (21 ) -, al mismo Grupo de Tubos At:::eleradores de Fluídos, que está fonnado por
varios Conotubos (9, 10) , y, que se ha descrito en la reivindicación anterior. 4) Submarino-Avión, -según reivindicación segunda-, caracterizado por el hecho de que este mismo Sistema de Propulsión Múltiple es, al mismo tiempo, un Generador Eléctrico, si es que hacemos que la derivación practicada en el último Conotubo (22) , en vez de dirigirse hacia el tubo semicircular (25) , como en el sistema descrito anterionnente, se dirija hacia unas cufías huecas, de aire, situadas en el eje de un Generador Eléctrico, en el que hemos situado unas hélices. Estas hélices se situarán en el interior del campo magnético de muchas parejas de imanes enfrentados, ambos con solenoides a su alrededor.
Patentes similares o relacionadas:
SISTEMA DE AJUSTE DE MOTORES PARA VEHÍCULOS SUBMARINOS DE OPERACIÓN REMOTA PARA APROVECHAMIENTO DE EMPUJE DE MOTORES, del 16 de Julio de 2020, de UNIVERSIDAD SIMÓN BOLIVAR: La presente invención pertenece al campo de buques u otras embarcaciones flotantes, sus equipos y medios de localización o recuperación de objetos […]
Método para instalar un cable submarino, del 17 de Junio de 2020, de FUNDACION TECNALIA RESEARCH & INNOVATION: Un método para instalar un cable submarino con un aparato sumergible , comprendiendo el método: suministrar alimentación eléctrica […]
Un dispositivo de limpieza de superficie, del 17 de Junio de 2020, de HullWiper Limited: Un dispositivo para limpiar superficies sumergidas en agua, que comprende un miembro de disco soportado de manera giratoria por […]
Comunicaciones entre robots móviles de medio acuático, del 6 de Mayo de 2020, de SAUDI ARABIAN OIL COMPANY: Un sistema robótico de medio acuático, que comprende: - una estación de control ; - un robot submarino que tiene un cuerpo, una […]
Conjunto de batería para submarino, del 15 de Abril de 2020, de NAVAL GROUP: Conjunto de batería para submarino que incluye al menos un ensamblaje mecánico y eléctrico de ramas , incluyendo cada rama al menos un módulo […]
 Vehículo de inspección in-situ de transformador con un casco de jaula, del 25 de Marzo de 2020, de ABB Power Grids Switzerland AG: Un dispositivo de inspección para usar en un contenedor de fluido, que comprende:
al menos un dispositivo de empuje ;
al menos un dispositivo […]
Vehículo de inspección in-situ de transformador con un casco de jaula, del 25 de Marzo de 2020, de ABB Power Grids Switzerland AG: Un dispositivo de inspección para usar en un contenedor de fluido, que comprende:
al menos un dispositivo de empuje ;
al menos un dispositivo […]
Dispositivo de elevación para un submarino, del 8 de Enero de 2020, de ThyssenKrupp Marine Systems GmbH: Dispositivo de elevación para un submarino para transportar una carga útil a lo largo de una dirección de elevación, caracterizado porque […]
SISTEMA DE RECUPERACIÓN ROBÓTICA DE FONDO DE ESPACIO ACUÁTICO CON NANOPARTICULAS DE OXIGENO, del 12 de Diciembre de 2019, de MIRANDA AGÜERO, Manuel: La presente invención se relaciona con un conjunto de recuperación robótica de fondo de espacio acuático mediante nanopartículas de oxígeno, que comprende […]