SISTEMA Y PROCEDIMIENTO DE REHABILITACIÓN.
Un sistema de rehabilitación con un sistema articulado (1) que tiene articulaciones integradas (3) que se pueden aplicar al cuerpo de un ser humano,
de tal manera que el sistema articulado aplicado (1) puede seguir movimientos seleccionados del cuerpo, en el que una articulación integrada (3) tiene un accionamiento (4) para mover la articulación (3) y un detector de posición (10, 13) para detectar la posición del accionamiento (4), y un control (14) para activar un accionamiento (4) y para detectar una secuencia de movimientos por medio de la evaluación de la posición del accionamiento (4), estando diseñado el citado accionamiento (4) como un servo accionamiento rotativo, que se caracteriza porque - el citado el accionamiento (4) tiene un motor (7) para hacer girar un árbol de accionamiento (9), un sensor (10) del motor para detectar la posición del motor y un sensor (13) de articulación para detectar la posición de la articulación, permitiendo el citado accionamiento (4) un desfase angular en el accionamiento (4) entre un movimiento del motor y un movimiento de la articulación y - estando diseñado el citado de control (14) para establecer un movimiento de las articulaciones (3) del sistema articulado (1) activando un accionamiento (4) o varios accionamientos (4) y para determinar y registrar un movimiento de las articulaciones (3) del sistema articulado (1) en la desviación de una activación del accionamiento (4)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08014972.
Solicitante: ISTITUTO S. ANNA DI EZIO PUGLIESE S.R.L.
DOLCE, GIULIANO, PROF. DR.
Nacionalidad solicitante: Italia.
Dirección: VIA SIRIS, 11 88900 CROTONE ITALIA.
Inventor/es: Dolce,Giuliano,Prof. Dr, Colizzi,Lucio,Dr.
Fecha de Publicación: .
Fecha Solicitud PCT: 25 de Agosto de 2008.
Clasificación Internacional de Patentes:
- A61H1/02M
Clasificación PCT:
- A61H1/02 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61H APARATOS DE FISIOTERAPIA, p. ej. DISPOSITIVOS PARA LOCALIZAR O ESTIMULAR LOS PUNTOS EN DONDE SE LOCALIZAN LOS CUERPOS; RESPIRACION ARTIFICIAL; MASAJE; DISPOSITIVOS DE BAÑO PARA USOS TERAPEUTICOS O HIGIENICOS PARTICULARES O PARA PARTES DETERMINADAS DEL CUERPO (electroterapia, magnetoterapia, radioterapia, terapia por ultrasonidos A61N). › A61H 1/00 Aparatos para el ejercicio pasivo (A61H 5/00 tiene prioridad ); Aparatos vibradores; Dispositivos quiroprácticos, p. ej. dispositivos para aplicar impactos al cuerpo, dispositivos externos para estirar o alinear de forma ligera los huesos no fracturados . › Aparatos para ejercicios de extensión o flexión.
- B25J9/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores de control programado.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2357519_T3.pdf
Fragmento de la descripción:
La invención se refiere a un sistema de rehabilitación con un sistema articulado que se puede aplicar al cuerpo de un ser humano de acuerdo con el preámbulo de la reivindicación 1.
La rehabilitación por medio de ejercicios terapéuticos se emplea, entre otras cosas, en los daños cerebrales que pueden ser de origen traumático, haberse producido por otra causa (hemorragias, infecciones o situaciones 5 similares) y que puede producir un estado comatoso o trastornos sensores - motrices que dan lugar a una discapacidad. Más preferiblemente en este último caso, se puede intentar curar la discapacidad o aliviar sus efectos por medio del adiestramiento del cerebro. Sin embargo, la presente invención no está limitada a esta área de aplicación preferida en particular, sino que siempre se puede emplear en una manera de asistencia con cualesquiera ejercicios terapéuticos. 10
Hoy en día, tales ejercicios terapéuticos suelen ser conducidos por un terapeuta adiestrado que establece la secuencia de movimientos para que el paciente los emule. Como alternativa, el mismo terapeuta mueve ciertas partes del cuerpo, por ejemplo, los brazos o las piernas del paciente, con el fin de ejecutar la secuencia deseada de movimientos con el paciente, siempre que el citado paciente no pueda hacerlo independientemente.
Además, también son conocidos dispositivos de adiestramiento que pueden ser empleados para la 15 rehabilitación, los cuales permiten un número limitado de ciertas secuencias de movimientos que el paciente tiene ejecutar repetidamente venciendo una resistencia ajustable, si esto es aplicable.
Estos sistemas tienen la desventaja de que normalmente sólo permiten una o unas pocas secuencias seleccionadas de movimientos y no proporcionan posibilidades de detección en lo que se refiere a la calidad con la cual se ejecutan los movimientos establecidos. 20
El documento norteamericano número 2004/0102723 A1 describe un procedimiento para controlar el movimiento utilizando un dispositivo que incluye un actuador, un sensor de posición de las articulaciones, un sensor de la tensión muscular y un sistema de control. El dispositivo proporciona asistencia a los músculos y las articulaciones y está diseñado para que funcione en varios modos para proporcionar ya sea asistencia o resistencia a un músculo con el fin de aumentar la movilidad, prevenir lesiones o aumentar la fuerza muscular. El sistema está 25 diseñado para funcionar autónomamente o estando acoplado a otros dispositivos similares para proporcionar asistencia o resistencia simultáneamente a múltiples músculos. El actuador es preferentemente un motor electrostático. Sin embargo, también son posibles motores de corriente continua, servomotores o motores de engranajes. En los modos de funcionamiento diferentes, se proporciona un detector de músculo para detectar la activación muscular con el fin de ejecutar un modo de asistencia del dispositivo. 30
En el documento norteamericano número 2004/0106881 A1 se describe un dispositivo ortopédico accionado similar, que detecta señales relativamente bajas en la proximidad de la articulación, generadas por un paciente que sufre daños nerviosos. Como respuesta a las señales de nivel relativamente bajo, el dispositivo ortopédico accionado hace que la articulación del paciente se mueva en consecuencia.
El documento WO 2005/074371 A2 desvela un dispositivo de rehabilitación que comprende un bastidor, un 35 actuador que incluye un mecanismo de movimiento que puede aplicar una fuerza que interactúa con un movimiento de la extremidad del paciente en al menos tres grados de libertad de movimiento del actuador y que puede prevenir el movimiento sustancial en cualquier punto y en cualquier dirección en un volumen de al menos 30 cm de diámetro. Aunque el dispositivo es normalmente un marco independiente, también se desvela un dispositivo de sistema articulado para los movimientos del codo. Además, se describe asistir el movimiento de la extremidad del paciente 40 por medio de un dispositivo de realidad virtual.
Para proporcionar cantidades de resistencia controladas al movimiento en el equipo de ejercicios o dispositivos ortopédicos, un módulo de control de acuerdo con el documento norteamericano US. 5.954.621 A tiene elementos de resistencia cooperativos. La fuerza entre los elementos es modificada de acuerdo con la posición de los elementos relativamente entre sí. Por ejemplo, el módulo de control puede conectar dos férulas de una rodillera 45 para que la resistencia a la flexión y a la extensión se programe de acuerdo con la posición de la pierna y de una con respecto a la otra.
El documento EP 1 442 704 A1 desvela un dispositivo y procedimiento de determinación la condición de caminar. Con esta finalidad, un medio de medición mide un parámetro que indica la velocidad de desplazamiento o aceleración de una porción inferior de una pierna con respecto a la otra pierna. En un medio de almacenamiento, se 50 almacenan los patrones de las condiciones de caminar, de tal manera que las diferentes condiciones se asocian entre sí. Usando estos patrones almacenados, un medio de determinación determina las condiciones de caminar del caminante.
En el documento EP 1 723 941 A1 se desvela un dispositivo de ayuda del comportamiento de un tipo que se usa de manera similar, que detecta un ángulo de la articulación y una señal mioeléctrica. En función de la 55 diferencia de estas dos señales, una señal de fenómeno físico y una bioseñal, se determina la reacción del dispositivo.
Por último, el documento norteamericano número 2004/0172097 A1 desvela un dispositivo terapéutico que comprende un elemento ortopédico mecánico que constituye una superficie de contacto con la extremidad del paciente y un elemento de estimulación neuromuscular, que incluye por lo menos una pareja de electrodos. El elemento ortopédico incluye articulaciones motorizadas, estando equipada cada una de las cuales con un sensor angular, un sensor de fuerza y un sensor de par de rotación para posibilitar un control de retroinformación. 5
El objeto de la presente invención, por lo tanto, es proponer un sistema de rehabilitación que haga posible el establecimiento de un gran número de secuencias diferentes de movimientos y que asiste y monitoriza la ejecución de las citadas secuencias de movimientos.
De acuerdo con la invención, este objeto se alcanza con las características de la reivindicación 1 y con las reivindicaciones dependientes. 10
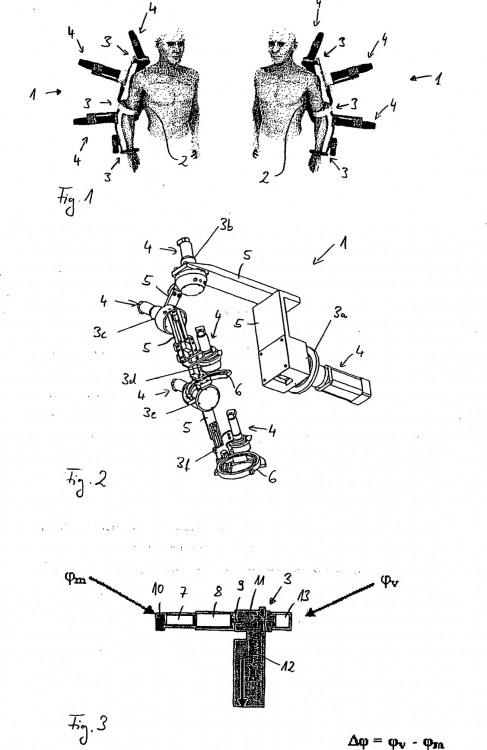
Con esta finalidad, un sistema articulado con articulaciones integradas se puede aplicar al cuerpo de un ser humano de acuerdo con la invención, de manera que el sistema articulado aplicado pueda reconstruir los movimientos seleccionados del cuerpo. Una articulación integrada tiene un accionamiento para mover la articulación y por lo menos un detector de posición para detectar la posición del accionamiento y / o de la articulación. Además, se proporciona en el sistema un control para activar los accionamientos y / o para detectar la secuencia de 15 movimientos mediante la evaluación de la posición de los accionamientos y / o de las articulaciones. Por ejemplo, el sistema de acuerdo con la invención puede ser un sistema articulado para aplicarlo a un brazo o una pierna, que puede reconstruir las secuencias típicas de los movimientos del brazo o de la pierna. En otras palabras, el sistema articulado asume la función de un esqueleto externo que hace posible reconstruir o iniciar la secuencia de movimientos del esqueleto humano. Debido al diseño como un sistema articulado con articulaciones integradas, el 20 sistema de acuerdo con la invención se construye de manera que sea ligero en comparación con la mayor parte de los dispositivos de ejercicio convencionales, de manera que una vez aplicado, por ejemplo, al brazo o la pierna de un paciente, no es tan pesado como para interferir con un movimiento natural y libre. Al proporcionar un detector de posición y un accionamiento preferentemente para cada articulación accionada o evaluada de manera coordinada por medio de un control común, el sistema de acuerdo con la invención se puede utilizar tanto para monitorizar la 25 ejecución de un movimiento establecido como para la asistencia a la ejecución de un movimiento establecido o una combinación de ambos, en el que se detecta y se asiste un movimiento correcto del paciente y en su caso un se contrarresta movimiento incorrecto.
Para implementar un sistema de este tipo, el accionamiento está diseñado como un accionamiento rotativo con un motor que hace girar un... [Seguir leyendo]
Reivindicaciones:
1. Un sistema de rehabilitación con un sistema articulado (1) que tiene articulaciones integradas (3) que se pueden aplicar al cuerpo de un ser humano, de tal manera que el sistema articulado aplicado (1) puede seguir movimientos seleccionados del cuerpo, en el que una articulación integrada (3) tiene un accionamiento (4) para mover la articulación (3) y un detector de posición (10, 13) para detectar la posición 5 del accionamiento (4), y un control (14) para activar un accionamiento (4) y para detectar una secuencia de movimientos por medio de la evaluación de la posición del accionamiento (4), estando diseñado el citado accionamiento (4) como un servo accionamiento rotativo, que se caracteriza porque
- el citado el accionamiento (4) tiene un motor (7) para hacer girar un árbol de accionamiento (9), un sensor (10) del motor para detectar la posición del motor y un sensor (13) de articulación para 10 detectar la posición de la articulación, permitiendo el citado accionamiento (4) un desfase angular en el accionamiento (4) entre un movimiento del motor y un movimiento de la articulación y
- estando diseñado el citado de control (14) para establecer un movimiento de las articulaciones (3) del sistema articulado (1) activando un accionamiento (4) o varios accionamientos (4) y para determinar y registrar un movimiento de las articulaciones (3) del sistema articulado (1) en la 15 desviación de una activación del accionamiento (4).
2. El sistema de acuerdo con la reivindicación 1, que se caracteriza porque el movimiento del accionamiento (4) y el movimiento de la articulación (3) están desacoplados por medio de un acoplamiento (11), cuyo efecto de acoplamiento se incrementa con el desfase angular creciente.
3. El sistema de acuerdo con una cualquiera de las reivindicaciones anteriores, que se caracteriza porque el 20 control (14) realiza el seguimiento del accionamiento (4).
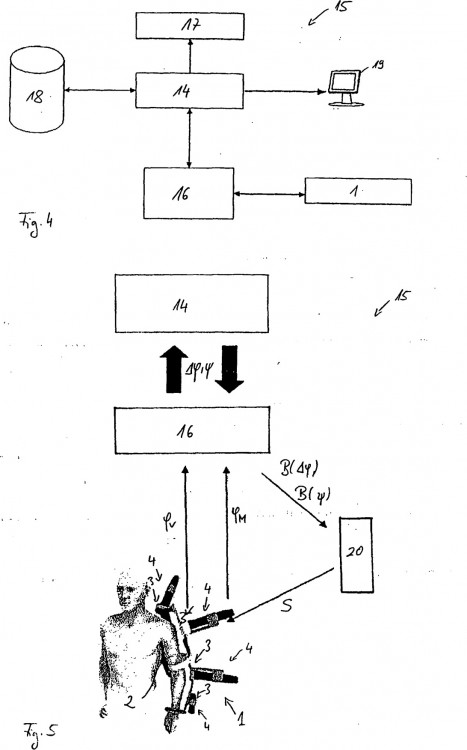
4. El sistema de acuerdo con una cualquiera de las reivindicaciones anteriores, que se caracteriza por un dispositivo para crear una realidad virtual con una presentación visual y una unidad de cálculo (17) en el que, teniendo en cuenta las coordenadas de un objetivo de movimiento del sistema articulado (1) y la posición actual del sistema articulado (1), se muestra una escena que asiste el objetivo de movimiento. 25
5. El sistema de acuerdo con la reivindicación 4, que se caracteriza porque el dispositivo para crear una realidad virtual tiene una presentación visual de tres dimensiones con una presentación visual separada para cada ojo.
6. El sistema de acuerdo con la reivindicaciones 4 ó 5, que se caracteriza porque el dispositivo para crear una realidad virtual tiene en cuenta los movimientos de la cabeza y / o de los ojos con respecto al sistema 30 articulado (1).
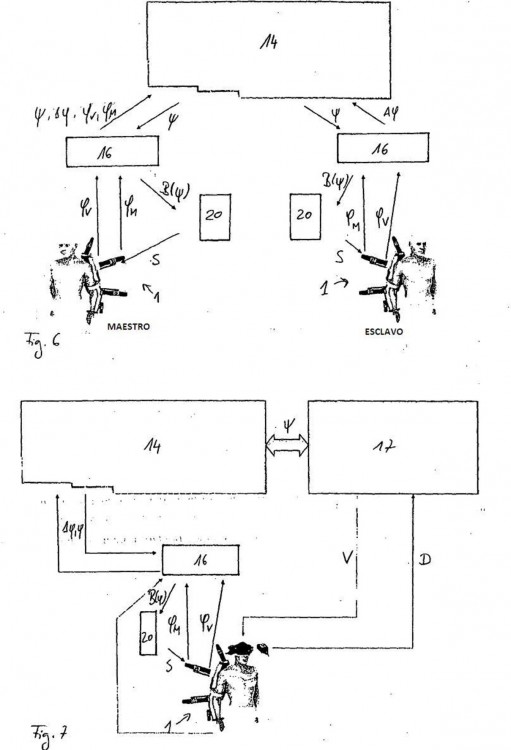
7. El sistema de un acuerdo con una cualquiera de las reivindicaciones anteriores, que se caracteriza porque el control (14) tiene un modo de funcionamiento síncrono, un modo de funcionamiento asíncrono y / o un modo de funcionamiento virtual para ejecutar una secuencia establecida de movimientos del sistema articulado (1). 35
8. El sistema de acuerdo con la reivindicación 7, que se caracteriza porque con el modo de funcionamiento síncrono, se utilizan dos sistema articulados (1) de los cuales un sistema articulado (1) es un sistema articulado maestro y un sistema articulado (1) es un sistema articulado esclavo, en el que el sistema articulado maestro (1) establece una secuencia de movimientos y el sistema articulado esclavo (1) ejecuta la secuencia establecida de movimientos. 40
9. El sistema de acuerdo con la reivindicación 8, que se caracteriza porque el control (14) controla la secuencia de movimientos en el sistema articulado esclavo (1) y, sobre las desviaciones de los movimientos establecidos, indica la secuencia establecida de movimientos en el sistema articulado maestro (1).
10. El sistema de acuerdo con una cualquiera de las reivindicaciones 7 a 9, que se caracteriza porque con el 45 modo de operación asíncrona, en una primera etapa, se registra una secuencia de movimiento con el sistema articulado (1) y la secuencia registrada de movimientos se ejecuta en una segunda etapa.
11. El sistema de acuerdo con una cualquiera de las reivindicaciones 7 a 10, que se caracteriza porque con el modo de funcionamiento virtual, la secuencia de movimientos que se debe ejecutar está asistida por medio de la presentación de una realidad virtual en una presentación visual, porque se crea una escena que 50 proporciona un incentivo a la persona ejecutante, en base a la posición actual del sistema articulado (1), para alcanzar el objetivo del movimiento del sistema articulado (1).
12. El sistema de acuerdo con la reivindicación 11, que se caracteriza porque la escena presentada virtualmente se adapta a la secuencia real de los movimientos del sistema articulado (1).
13. El sistema de acuerdo con una cualquiera de las reivindicaciones 7 a 11, que se caracteriza porque el grado de asistencia de la secuencia de los movimientos por el accionamiento (4) se puede parametrizar.
14. El sistema de acuerdo con una cualquiera de las reivindicaciones 7 a 13, que se caracteriza porque la desviación de la secuencia de los movimientos con respecto a la secuencia establecida de los movimientos es detectada. 5
15. El sistema de acuerdo con la reivindicación 14, que se caracteriza porque el control (14) con la detección de una desviación en la secuencia de los movimientos activa los accionamientos (4), de tal manera que se asiste la secuencia correcta de los movimientos.
Patentes similares o relacionadas:
BRAZO ROBOTICO, del 7 de Febrero de 2012, de UNIVERSIDAD MIGUEL HERNANDEZ: Un brazo robótico para controlar el movimiento del brazo de un usuario, y constituido por una cadena cinemática que en su zona distal comprende un soporte para […]
 EXOESQUELETO PARA UN BRAZO HUMANO, PARTICULARMENTE PARA APLICACIONES ESPACIALES, del 16 de Marzo de 2010, de ORGANISATION INTERGOUVERNEMENTALE DITE AGENCE SPATIALE EUROPEENNE: Exoesqueleto de brazo para adquirir datos representativos de movimientos de las articulaciones del brazo de un operador humano con ayuda […]
EXOESQUELETO PARA UN BRAZO HUMANO, PARTICULARMENTE PARA APLICACIONES ESPACIALES, del 16 de Marzo de 2010, de ORGANISATION INTERGOUVERNEMENTALE DITE AGENCE SPATIALE EUROPEENNE: Exoesqueleto de brazo para adquirir datos representativos de movimientos de las articulaciones del brazo de un operador humano con ayuda […]
SISTEMA ROBOTIZADO PORTATIL PARA REHABILITACION FUNCIONAL ASISTIDA DE ARTICULACIONES, del 31 de Julio de 2020, de Gogoa Mobility Robots, S.L: 1. Sistema robotizado portátil para la rehabilitación funcional asistida de articulaciones, con un grado de libertad de los que constan de: a) un actuador […]
Dispositivo de estiramiento de fascia plantar y tendón de aquiles, del 29 de Julio de 2020, de RODRÍGUEZ SANZ, David: 1. Dispositivo de estiramiento de la fascia plantar y el tendón de Aquiles caracterizado porque comprende una pieza semicircular como apoyo del pie con dos […]
Dispositivo exoesqueleto de movilidad de piernas con un mecanismo de accionamiento mejorado que emplea un acoplamiento magnético/eléctrico, del 22 de Julio de 2020, de Parker-Hannificn Corporation: Un dispositivo de movilidad que comprende: un conjunto de accionamiento que incluye un miembro de accionamiento rotatorio ; un componente accionado […]
SISTEMA ROBOTIZADO PORTÁTIL PARA LA REHABILITACIÓN FUNCIONAL ASISTIDA DE ARTICULACIONES, del 9 de Julio de 2020, de Gogoa Mobility Robots, S.L: Sistema robotizado portátil para la rehabilitación funcional asistida de articulaciones, con un grado de libertad de los que constan de un actuador compuesto por […]
Aparato de terapia, del 8 de Julio de 2020, de Lime Medical GmbH: Aparato de terapia para realizar un movimiento continuo, pasivo y/o asistido activamente de los dedos y del pulgar de la mano de un paciente, que comprende: […]
Sistema electromédico automatizado y método de gestión relacionado, del 1 de Julio de 2020, de Lauro Group S.r.l: Sistema electromédico automatizado para tratar, curar, analizar y monitorizar una pluralidad de condiciones médicas relacionadas con la columna […]