SISTEMA QUIRÚRGICO ULTRASÓNICO.
- Un sistema quirúrgico ultrasónico (100) que comprende: una unidad ultrasónica (106) que incluye un instrumento (114) conectado operativamente a un generador ultrasónico (112),
en la cual dicho instrumento incluye un efector extremo (58); una unidad (108) de posicionamiento que incluye un brazo móvil (116), en la cual dicho brazo móvil está adaptado para sostener dicho instrumento de dicha unidad ultrasónica; una unidad (104) de control en comunicación con dicha unidad ultrasónica y dicha unidad de posicionamiento; y una interfaz de usuario (102) en comunicación con dicha unidad de control, caracterizado porque dicha unidad de control es programable con una subrutina quirúrgica para llevar a cabo una tarea quirúrgica, dicha unidad de control está pre-programada con una o más subrutinas quirúrgicas; y dicha interfaz del usuario está adaptada para inicializar un ciclo operativo de dicha subrutina quirúrgica de manera que dicha tarea quirúrgica sea llevada a cabo automáticamente durante dicho ciclo operativo, de manera que el cirujano pueda seleccionar e iniciar dicha una, o más, subrutinas quirúrgicas pre-programadas; en el cual dicha subrutina quirúrgica incluye maniobrar dicho efector extremo mientras se acciona dicho instrumento ultrasónico para lograr un resultado quirúrgico mejorado
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07251342.
Solicitante: ETHICON ENDO-SURGERY, INC..
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 4545 CREEK ROAD CINCINNATI, OHIO 45242 ESTADOS UNIDOS DE AMERICA.
Inventor/es: STULEN, FOSTER B., DONOFRIO, WILLIAM T., HOUSER, KEVIN L..
Fecha de Publicación: .
Fecha Solicitud PCT: 28 de Marzo de 2007.
Clasificación Internacional de Patentes:
- A61B17/32U8
- A61B19/00M
- A61B19/00M2
Clasificación PCT:
- A61B17/32 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › Instrumentos quirúrgicos de corte (instrumentos para ligar y cortar A61B 17/125, A61B 17/138).
- A61B19/00
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2361941_T3.pdf
Fragmento de la descripción:
Campo de la invención
La presente invención se refiere a instrumentos quirúrgicos ultrasónicos y, más particularmente, a instrumentos quirúrgicos ultrasónicos que tienen unos efectores extremos para cortar y coagular el tejido. La presente solicitud también se refiere a sistemas quirúrgicos robóticos y, más particularmente, a sistemas quirúrgicos robóticos usados con instrumentos quirúrgicos ultrasónicos.
Antecedentes de la invención
Los cirujanos usan instrumentos ultrasónicos en cirugía para cortar y coagular el tejido. Unos elementos piezoeléctricos son excitados eléctricamente a una frecuencia resonante de un instrumento ultrasónico para crear vibraciones que son transmitidas a través de un resonador y amplificadas para producir una vibración por onda estacionaria y mecánica de la misma frecuencia. Un conjunto de transmisión de ultrasonidos del instrumento tiene un guíaondas de transmisión, alargado, que transmite esta vibración hasta un efector extremo (p. ej., una cuchilla de corte) en la punta distal del instrumento. Un ejemplo de un instrumento quirúrgico por ultrasonido es la Lanza de Coagulación Harmonic Scalpel® Laparosonic®, comercializada por Ethicon Endo-Surgery, Inc., de Cincinnati, Ohio.
En años recientes, se han desarrollado y usado sistemas quirúrgicos robóticos mínimamente invasivos para determinados procedimientos quirúrgicos que incluyen los procedimientos de injerto de derivación aortocoronaria y de colecistectomía. Los sistemas robóticos proporcionan una cantidad de beneficios prometedores que reducen generalmente la habilidad quirúrgica requerida para llevar a cabo determinados procedimientos quirúrgicos, ya que aumentan la destreza y eliminan el temblor de la mano. Los sistemas robóticos también permiten a los cirujanos llevar a cabo los procedimientos en una localización remota, en donde remota se entiende como cualquier zona del paciente situada a “más de un brazo de distancia”. Un ejemplo de un sistema quirúrgico robótico es el DAVINCI, que es comercializado por Intuitive Surgical Inc., de Mountain View, California.
La Patente Estadounidense Nº 6.783.524 (Publicación de Solicitud Nº 2002/0177843 A1), de Anderson y otros, titulada “Herramienta Quirúrgica Robótica con Cauterización por Ultrasonido e Instrumento de Corte” da a conocer un instrumento quirúrgico por ultrasonido montado en un brazo móvil de un sistema quirúrgico robótico tal como el DAVINCI. El procedimiento dado a conocer para mejorar la cirugía robótica incluye generalmente acoplar el instrumento al sistema quirúrgico robótico, colocar un efector extremo del instrumento en contacto con el tejido en una zona de cirugía y suministrar una energía de ultrasonido al tejido. En general, el sistema robótico dado a conocer permite al cirujano controlar directamente los movimientos y la actuación del instrumento desde una localización remota. El documento US 6.325.808 B1 da a conocer un sistema robótico que comprende una herramienta quirúrgica, una base de acoplamiento y un controlador programado conectado operativamente a la base de acoplamiento de manera que el movimiento de la herramienta quirúrgica pueda ser controlado de manera colaborativa tanto activamente por el controlador como manualmente por el cirujano.
Sin embargo, pese a tales avances en la tecnología quirúrgica, aún es necesaria una habilidad considerable por parte de los cirujanos para ejecutar determinadas etapas de ciertos procedimientos quirúrgicos. Por ejemplo, para coagular por ultrasonido un vaso sanguíneo tal como el conducto cístico de la vesícula biliar, el cirujano puede presionar una superficie relativamente extensa de la cuchilla ultrasónica contra el conducto, aplicar una ligera fuerza de sujeción sobre el conducto y barrer con el efector extremo ultrasónico el interior de una zona de tratamiento en el conducto mientras se aplica un nivel intermedio de energía ultrasónica. Luego, para cortar el conducto, el cirujano puede presentar un borde de la cuchilla ante el conducto, aplicar una elevada fuerza de sujeción mientras mantiene la cuchilla estacionaria y aplicar un elevado nivel de energía ultrasónica. El cirujano puede repetir varias veces estas etapas durante un procedimiento quirúrgico a un paciente.
Para reducir el tiempo en que se llevan a cabo determinados procedimientos quirúrgicos y para mejorar los resultados quirúrgicos, a los cirujanos les gustaría emplear diversas técnicas que normalmente no resultan prácticas al usar los sistemas quirúrgicos actuales. Por ejemplo, a muchos cirujanos les gustaría tener una manera de aplicar sobre el tejido una fuerza de sujeción rápidamente pulsante mientras aplican energía ultrasónica para agitar y/o hacer circular los fluidos en el tejido para acelerar la desecación de fluidos, acortando así el tiempo de coagulación del tejido. A los cirujanos también les gustaría tener una manera de aplicar consistentemente el nivel correcto de potencia de la energía ultrasónica para una duración correcta, principalmente para evitar lesiones tales como daños térmicos laterales al tejido, pero también para acelerar el procedimiento al tiempo que se aseguran que el sellado del tejido sea hemostático. Los cirujanos dependen en gran medida de sus sentidos físicos para estimar la fuerza de sujeción sobre el tejido y el nivel/duración de la potencia de la energía ultrasónica que debe aplicarse sobre el tejido. Obviamente, una parte de esta retroalimentación sensorial se ve en gran medida disminuida si el cirujano está usando un sistema quirúrgico robótico y está separado del paciente.
Claramente, puede ser muy difícil, por no decir imposible, que un cirujano lleve a cabo un pluralidad de tareas quirúrgicas de manera bien coordinada, cuyas tareas pueden incluir, por ejemplo, barrer con la cuchilla ultrasónica el tejido, rotar la cuchilla, pulsar la fuerza de sujeción y aplicar energía ultrasónica a varios niveles de potencia.
Por consiguiente, existe una necesidad de un sistema quirúrgico ultrasónico en el cual determinadas tareas puedan llevarse a cabo automática y consistentemente, reduciendo por lo tanto el nivel de habilidad requerido por el cirujano para llevar a cabo las tareas, mejorando los resultados quirúrgicos, reduciendo el tiempo del procedimiento quirúrgico y mejorando adicionalmente la capacidad para efectuar procedimientos quirúrgicos remotamente.
Sumario de la invención
La presente invención proporciona un sistema quirúrgico ultrasónico según lo reivindicado más adelante.
Los aspectos y otros aspectos del sistema quirúrgico ultrasónico para cortar y coagular ultrasónicamente el tejido de un paciente durante un procedimiento quirúrgico se harán aparentes a partir de la siguiente descripción, los dibujos que la acompañan y las reivindicaciones adjuntas.
Breve descripción de las figuras
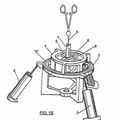
La FIGURA 1 es una vista en perspectiva de un aparato quirúrgico robótico de la técnica anterior;
La FIGURA 2 es una vista en perspectiva de una herramienta quirúrgica ultrasónica de la técnica anterior para su uso en el aparato quirúrgico robótico mostrado en la Fig. 1;
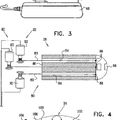
La FIGURA 3 es una vista superior en corte de un instrumento quirúrgico ultrasónico de acuerdo con un aspecto, en la cual el instrumento incluye una unidad de actuación motorizada para operar un efector extremo;
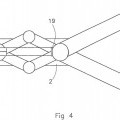
La FIGURA 4 es una vista en perspectiva de la porción distal del instrumento quirúrgico ultrasónico mostrado en la Fig. 3;
La FIGURA 5 es un diagrama de bloques que muestra un sistema quirúrgico ultrasónico de acuerdo con un primer aspecto, el cual está representado por bloques de líneas continuas, y de acuerdo con un segundo aspecto, el cual está representado por todos los bloques;
La FIGURA 6 es una vista lateral de la porción distal del instrumento mostrado en la Fig. 4;
La FIGURA 7 es una vista superior de la porción distal del instrumento mostrado en la Fig. 4;
La FIGURA 8 es una vista en sección transversal, tomada por la línea 8-8 de la Fig. 7, del instrumento mostrado en la Fig. 4;
La FIGURA 9 es un gráfico que representa una potencia ultrasónica aplicada a un efector extremo ultrasónico frente al tiempo, durante un ciclo operativo ejemplar, de acuerdo con un aspecto del sistema quirúrgico ultrasónico;
La FIGURA 10 es un gráfico que representa un ángulo de un elemento de sujeción del efector extremo frente al tiempo, durante el ciclo operativo,... [Seguir leyendo]
Reivindicaciones:
1. Un sistema quirúrgico ultrasónico (100) que comprende:
una unidad ultrasónica (106) que incluye un instrumento (114) conectado operativamente a un generador ultrasónico (112), en la cual dicho instrumento incluye un efector extremo (58);
una unidad (108) de posicionamiento que incluye un brazo móvil (116), en la cual dicho brazo móvil está adaptado para sostener dicho instrumento de dicha unidad ultrasónica;
una unidad (104) de control en comunicación con dicha unidad ultrasónica y dicha unidad de posicionamiento; y
una interfaz de usuario (102) en comunicación con dicha unidad de control,
caracterizado porque
dicha unidad de control es programable con una subrutina quirúrgica para llevar a cabo una tarea quirúrgica, dicha unidad de control está pre-programada con una o más subrutinas quirúrgicas; y
dicha interfaz del usuario está adaptada para inicializar un ciclo operativo de dicha subrutina quirúrgica de manera que dicha tarea quirúrgica sea llevada a cabo automáticamente durante dicho ciclo operativo, de manera que el cirujano pueda seleccionar e iniciar dicha una, o más, subrutinas quirúrgicas pre-programadas;
en el cual dicha subrutina quirúrgica incluye maniobrar dicho efector extremo mientras se acciona dicho instrumento ultrasónico para lograr un resultado quirúrgico mejorado.
2. El sistema quirúrgico ultrasónico de la Reivindicación 1, en el cual dicho brazo móvil sostiene de manera desmontable dicho instrumento.
3. El sistema quirúrgico ultrasónico de la Reivindicación 1, en el cual dicha tarea quirúrgica incluye energizar dicho efector extremo de acuerdo con un perfil de nivel de potencia ultrasónica de dicha subrutina quirúrgica.
4. El sistema quirúrgico ultrasónico de la Reivindicación 3, en el cual dicha tarea quirúrgica incluye efectuar un barrido de dicho efector extremo contra un tejido corporal.
5. El sistema quirúrgico ultrasónico de la Reivindicación 3, en el cual dicha tarea quirúrgica incluye efectuar un barrido de dicho efector extremo en una dirección longitudinal dentro de una zona de tratamiento de acuerdo con un perfil de barrido longitudinal de dicha subrutina quirúrgica.
6. El sistema quirúrgico ultrasónico de la Reivindicación 1, en el cual dicho efector extremo (58) incluye al menos uno de entre un elemento de sujeción (62) y una cuchilla ultrasónica (60).
7. El sistema quirúrgico ultrasónico de la Reivindicación 6, que comprende adicionalmente una unidad de actuación
(110) que tiene un conjunto (118) de transmisión de fuerza conectado operativamente a dicho elemento de sujeción y en comunicación con dicha unidad de control, en el cual dicho conjunto de transmisión de fuerza está adaptado para accionar dicho elemento de sujeción y aplicar una fuerza de sujeción variable sobre el tejido corporal.
8. El sistema quirúrgico ultrasónico de la Reivindicación 1, en el cual dicho efector extremo (58) incluye una cuchilla ultrasónica (62).
9. El sistema quirúrgico ultrasónico de la Reivindicación 8, que comprende adicionalmente una unidad de actuación
(110) que tiene un conjunto (120) de rotación de cuchilla conectado operativamente a dicha cuchilla ultrasónica de manera que el conjunto de rotación de cuchilla puede ser actuado para rotar la cuchilla sobre un eje central, y en el cual dicha tarea quirúrgica incluye rotar dicha cuchilla ultrasónica sobre dicho eje central de acuerdo con un perfil de rotación de cuchilla de dicha subrutina quirúrgica.
10. El sistema quirúrgico ultrasónico de la Reivindicación 9, en el cual dicha cuchilla ultrasónica incluye una pluralidad de porciones de superficie de la cuchilla dispuestas alrededor de dicho eje central y que definen un perfil de sección transversal de la cuchilla, y en el cual dicha cuchilla ultrasónica es rotada de manera que cualquiera de dichas porciones de superficie pueda ser presentada hacia el tejido.
11. El sistema quirúrgico ultrasónico de la Reivindicación 10, en el cual dichas porciones de superficie de la cuchilla incluyen al menos una de entre una porción de superficie relativamente plana, una porción de superficie relativamente redondeada y una porción de superficie de borde.
12. El sistema quirúrgico ultrasónico de la Reivindicación 1, en el cual dicha unidad de posicionamiento es un aparato robótico quirúrgico que tiene una estación de trabajo en comunicación con dicho brazo móvil.
13. El sistema quirúrgico ultrasónico de la Reivindicación 1, que comprende adicionalmente un sistema (122) de retroalimentación que incluye al menos un sensor situado en al menos una de entre dichas unidades ultrasónica, de posicionamiento, y de actuación y que tiene un circuito de sensor asociado, en el cual dicho sistema de retroalimentación está conectado operativamente a dicha unidad de control, y en el cual una señal de retroalimentación asociada con un parámetro de las prestaciones operativas de dicho instrumento durante dicho ciclo operativo puede ser transmitida desde dicho sensor hasta dicha unidad de control, de manera que dicho sistema de control pueda procesar dicha señal de retroalimentación y responder de acuerdo con dicha subrutina quirúrgica.
14. El sistema quirúrgico ultrasónico de la Reivindicación 13, en el cual dicho sistema de retroalimentación incluye un circuito (128) de medición de la impedancia eléctrica para medir la impedancia eléctrica del tejido que está siendo tratado.
15. El sistema quirúrgico ultrasónico de la Reivindicación 13, en el cual dicho sistema de retroalimentación incluye un circuito (130) de medición de impedancia acústica para medir la impedancia acústica del tejido que está siendo tratado. 16. El sistema quirúrgico ultrasónico de la Reivindicación 13, en el cual dicho sistema de retroalimentación incluye un sensor (132) y un circuito de temperatura para medir al menos una de entre la temperatura de un tejido en tratamiento, la temperatura de dicho efector extremo, la temperatura de un objeto cercano a dicho tejido que está siendo tratado y la temperatura de un fluido que rodea dicho tejido que está siendo tratado.
Patentes similares o relacionadas:
UN MECANISMO LIMITADOR DE UNA HERRAMIENTA, del 1 de Julio de 2011, de Stanmore Implants Worldwide Limited: Un mecanismo limitador de una herramienta que comprende un manipulador y un mecanismo de centrado remoto montado en el mismo, proporcionando […]
PLATAFORMA ROBOTIZADA CON MÚLTIPLES APLICACIONES PARA NEUROCIRUGÍA Y PROCEDIMIENTO DE REAJUSTE, del 21 de Junio de 2011, de MEDTECH S.A: Plataforma robotizada con múltiples aplicaciones para neurocirugía caracterizada porque comprende: - una consola de planificación que integra […]
 INSTRUMENTAL QUIRÚRGICO, del 5 de Abril de 2011, de VLEUGELS HOLDING B.V: Instrumento quirúrgico, en particular, para cirugía mínimamente invasiva, comprendiendo el instrumento un bastidor alargado que, en la proximidad de un […]
INSTRUMENTAL QUIRÚRGICO, del 5 de Abril de 2011, de VLEUGELS HOLDING B.V: Instrumento quirúrgico, en particular, para cirugía mínimamente invasiva, comprendiendo el instrumento un bastidor alargado que, en la proximidad de un […]
 CATETER GUIADO ROBOTICAMENTE, del 19 de Agosto de 2010, de BIOSENSE WEBSTER, INC.: Aparato para usarse con un catéter manejable que incluye un control para el pulgar adaptado para controlar una desviación de […]
CATETER GUIADO ROBOTICAMENTE, del 19 de Agosto de 2010, de BIOSENSE WEBSTER, INC.: Aparato para usarse con un catéter manejable que incluye un control para el pulgar adaptado para controlar una desviación de […]
 DISPOSITIVO HAPTICO PARA CIRUGIA VIRTUAL, del 1 de Junio de 2008, de UNIVERSIDAD REY JUAN CARLOS: Dispositivo háptico para cirugía virtual, de propósito general que permite la simulación de cualquier técnica de cirugía, el cual comprende […]
DISPOSITIVO HAPTICO PARA CIRUGIA VIRTUAL, del 1 de Junio de 2008, de UNIVERSIDAD REY JUAN CARLOS: Dispositivo háptico para cirugía virtual, de propósito general que permite la simulación de cualquier técnica de cirugía, el cual comprende […]
DISPOSITIVO ULTRASÓNICO PARA COAGULACIÓN DE TEJIDOS, del 10 de Febrero de 2012, de SOUND SURGICAL TECHNOLOGIES LLC: Un aparato quirúrgico ultrasónico para la coagulación de un tejido animal que tiene un asa para manipulación por parte de un cirujano, un transductor […]
INSTRUMENTO QUIRÚRGICO ULTRASÓNICO, del 8 de Febrero de 2012, de Tyco Healthcare Group LP Wisconsin Alumni Research Foundation (WARF): Un instrumento quirúrgico que comprende: un mango ; una porción de cuerpo alargada que se extiende distalmente desde el mango, estando […]
 SISTEMA DE RETENCIÓN DE TEJIDO PARA TRATAMIENTO MÉDICO CON ULTRASONIDOS, del 13 de Abril de 2011, de ETHICON ENDO-SURGERY, INC.: Un sistema de tratamiento médico con ultrasonidos que comprende un efector de extremo que puede insertarse en un paciente, en […]
SISTEMA DE RETENCIÓN DE TEJIDO PARA TRATAMIENTO MÉDICO CON ULTRASONIDOS, del 13 de Abril de 2011, de ETHICON ENDO-SURGERY, INC.: Un sistema de tratamiento médico con ultrasonidos que comprende un efector de extremo que puede insertarse en un paciente, en […]