SISTEMA Y PROCEDIMIENTO DE REFERENCIA DE POSICIONAMIENTO DE SATELITES.
Un sistema de procesamiento de la información de la posición de satélites,
comprendiendo dicho sistema:
un primer sistema de posicionamiento de los satélites, SPS, un receptor de referencia (90 a 96, 104 a 108, 301) que tiene una primera posición conocida y que tiene una primera interfaz de comunicación la cual está acoplada a un medio de comunicación, transmitiendo dicho primer receptor de referencia (90 a 96, 104 a 108, 301) del SPS unos primeros datos de las efemérides de los satélites hasta dicho medio de comunicación, en el que "los datos de las efemérides de los satélites" incluyen el reloj de los satélites;
un segundo receptor de referencia (90 a 96, 104 a 108, 301) del SPS que tiene una segunda posición conocida y que tiene una segunda interfaz de comunicación, la cual está acoplada a dicho medio de comunicación, transmitiendo dicho segundo receptor de referencia (90 a 96, 104 a 08, 301) del SPS unos segundos datos de las efemérides de los satélites hasta dicho medio de comunicación; y
un primer sistema de procesamiento digital (26, 50, 51, 115, 117, 312) acoplado a dicho medio de comunicación para recibir dichos primeros datos de las efemérides de los satélites y dichos segundos datos de las efemérides de los satélites y para suministrar información de los satélites que incluye dichos datos de las efemérides de los satélites recibidos para un receptor móvil (16, 17, 22, 75 a 80, 424) del SPS con el fin de determinar en dicho receptor móvil (16, 17, 22, 75 a 80, 424) del SPS una solución de navegación de una información de la posición para dicho receptor móvil (16, 17, 22, 75 a 80, 424) del SPS, por medio de lo cual dicho receptor móvil (16, 17, 22, 75 a 80, 424) del SPS puede ser accionado para determinar su propia posición mediante (a) la recepción de señales del SPS y la determinación de los pseudorrangos y (b) la recepción y utilización de dichos datos de las efemérides de los satélites desde dicho primer sistema de procesamiento digital (26, 50, 51, 115, 117, 312),
en el que el primer sistema de procesamiento digital (26, 50, 51, 115, 117, 312) puede ser accionado para suministrar, para el receptor móvil (16, 17, 22, 75 a 80, 424) del SPS, los datos de las efemérides de los satélites para los satélites a la vista del receptor móvil (16, 17, 22, 75 a 80, 424) del SPS en base a una localización aproximada (11, 12, 14, 18, 20) del receptor móvil (16, 17, 22, 75 a 80, 424) del SPS determinada a partir de un sitio de célula (13, 15, 17, 21), el cual ha establecido un enlace de comunicación inalámbrico basado en células con el receptor móvil (16, 17, 22, 75 a 80, 424) del SPS
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US99/08083.
Solicitante: SNAPTRACK INC..
Nacionalidad solicitante: Estados Unidos de América.
Dirección: SUITE 250, 4040 MOORPARK AVENUE,SAN JOSE, CA 95117.
Inventor/es: SHEYNBLAT, LEONID, KRASNER, NORMAN F., MOEGLEIN,MARK.
Fecha de Publicación: .
Fecha Concesión Europea: 17 de Febrero de 2010.
Clasificación Internacional de Patentes:
- G01S1/00S2B2
- G01S1/00S2B3
- G01S5/00R1B
- G01S5/00R5
Clasificación PCT:
- G01S5/14 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
Clasificación antigua:
- G01S5/14 G01S 5/00 […] › Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
Fragmento de la descripción:
Sistema y procedimiento de referencia de posicionamiento de satélites.
Solicitudes relacionados
La presente solicitud es una continuación en parte de la Patente estadounidense No. 6 208 290.
Antecedentes de la invención
La presente invención se refiere al campo de los sistemas de posicionamiento de satélites que utilizan unos receptores de referencia y, más concretamente, a una red de receptores de referencia para un sistema de posicionamiento de satélites.
Los sistemas de posicionamiento de satélites (SPS) convencionales, como por ejemplo el Sistema de Posicionamiento Global (GPS) estadounidense utilizan las señales procedentes de los satélites para determinar su posición. Los receptores convencionales del GPS normalmente determinan su posición mediante el cálculo de los tiempos relativos de llegada de las señales transmitidas de forma simultánea a partir de una multiplicidad de satélites del GPS que orbitan alrededor de la tierra. Cada satélite transmite, como parte de su mensaje de navegación, tanto los datos de posicionamiento del satélite como los datos sobre la sincronización de los relojes los cuales especifican su posición y el estado del reloj en momentos determinados; estos datos, encontrados en las subtramas 1 a 3 del mensaje de navegación del GPS a menudo se designan como datos de reloj y efemérides de satélite y se designarán como datos de las efemérides de los satélites. Los receptores del GPS convencionales típicamente buscan y adquieren las señales del GPS, leen el mensaje de navegación procedente de cada señal para obtener los datos de las efemérides de los satélites para su respectivo satélite, determinan pseudorrangos para estos satélites, y computan el emplazamiento del receptor del GPS a partir de los pseudorrangos y de los datos de las efemérides de los satélites procedentes de los satélites.
La precisión mejorada de la posición puede ser obtenida utilizando una técnica conocida y convencional designada como GPS diferencial. En el GPS diferencial convencional, una sola estación de referencia diferencial transmite las correcciones del GPS diferencial a los usuarios situados en una zona local. De esta forma, hay típicamente tres componentes principales de un sistema de GPS diferencial convencional. El primer componente es una estación de referencia situada en un emplazamiento conocido con un receptor del GPS situado en un emplazamiento conocido que generalmente es capaz de observar todos los satélites a la vista y, de forma opcional, con un software en la estación de referencia, el cual podría estar insertado en el receptor del GPS, para computar las correcciones de los pseudorrangos y para codificarlas en un formato de transmisión específico. Otro componente es un enlace de radio para permitir las correcciones diferenciales en tiempo real a los receptores móviles del GPS. El tercer componente es el receptor móvil del GPS que, así mismo, incluye un receptor para la recepción para las correcciones diferenciales emitidas desde la estación de referencia.
Las correcciones del GPS diferencial son utilizadas por los receptores móviles del GPS de manera convencional para corregir los datos de los pseudorrangos los cuales son utilizados mediante la computación de los tiempos relativos de llegada de las señales del GPS transmitidas desde los satélites del GPS. El GPS diferencial convencional no tiene que operar en tiempo real o proporcionar correcciones al receptor móvil del GPS, aunque este a menudo es el caso. Hay muchas mejoras en el GPS diferencial que se describen en la literatura tanto de patentes como de fuera de las patentes. Estas diversas mejoras se concentran en la computación de las correcciones del diferencial y en la aplicación de los algoritmos así como en los procedimientos de suministro de las correcciones del diferencial. Las correcciones del diferencial se sitúan, en su mayor parte, en el dominio de las mediciones (pseudorrango, rango delta acumulado y estimaciones de los errores de la tasa de rango).
El GPS diferencial convencional ofrece una mejora considerable en la precisión de la posición si tanto el receptor de referencia como el receptor móvil del GPS participante están en íntima proximidad entre sí. Sin embargo, la mejora de la precisión a partir del GPS diferencial se degrada a medida que la distancia de separación entre los dos receptores se incrementa. Una solución para rectificar esta degradación de la precisión consiste en proporcionar una red de receptores de referencia del GPS que se sitúen dispersos a lo largo de un área geográfica para proporcionar un área de cobertura que coincida con el área dentro de la cual los receptores móviles del GPS puedan operar, de tal manera que tiendan a observar el mismo conjunto de satélites. En esta distancia, un receptor móvil del GPS puede captar correcciones del diferencial desde más de una estación de referencia diferencial, y el receptor móvil del GPS puede seleccionar aquellas correcciones del diferencial para los satélites a la vista en base a la proximidad relativa entre el receptor móvil del GPS y las dos o más estaciones de referencia. El uso de múltiples estaciones de referencia en un sistema del GPS diferencial a veces se designa como GPS diferencial de área extensa (WADGPS).
Una forma adicional de un sistema de referencia del WADGPS incluye una red de receptores de referencia del GPS y una estación maestra la cual está en comunicación con las estaciones de referencia para recibir sus mediciones y concretar un conjunto fusionado de efemérides y de estimaciones de correcciones de reloj para cada satélite del GPS observadas por las estaciones de referencia. Esta estación maestra puede a continuación proporcionar, mediante un transmisor, un mensaje de GPS diferencial con las correcciones aplicables a lo largo de un rango ampliado. Ejemplos de dichos sistemas de referencia de GPS diferencial de área amplia incluyen los descritos en las Patentes estadounidenses Nos. 5,323,322 y 5,621,646.
Con independencia de la cobertura del sistema concreto de referencia diferencial, el objetivo fundamental de un sistema GPS diferencial es proporcionar un servicio diferencial que ayude al receptor móvil del GPS a suprimir los errores procedentes de las mediciones del GPS o de la solución derivada de la medición. Los errores del sistema GPS que la red intenta eliminar son una función del número de estaciones de referencia, de su emplazamiento espacial y de la complejidad de los algoritmos implementados en la instalación de procesamiento central. La función secundaria de las redes diferenciales es proporcionar la integridad y fiabilidad al servicio diferencial mediante la realización de diversos controles en los dominios de la medición y del espacio de la variable de estado.
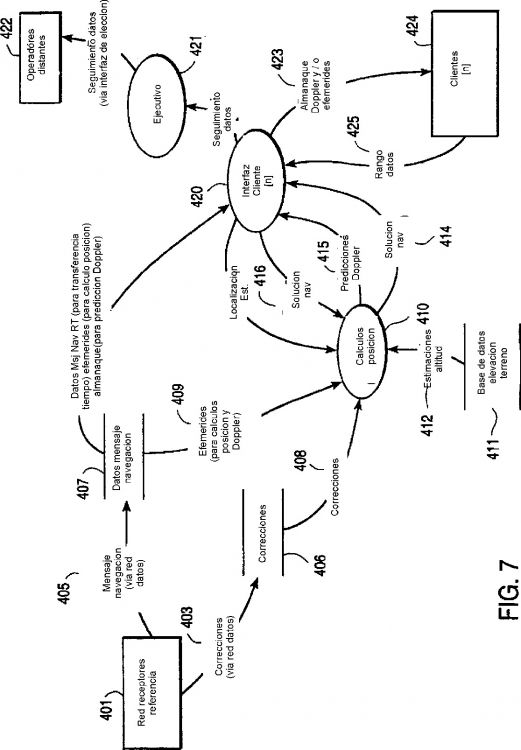
Aunque los sistemas referidos proporcionan una precisión mejorada a los receptores móviles del GPS, los sistemas no son compatibles con una arquitectura del GPS cliente - servidor en la cual un receptor móvil del GPS funcione como un sistema cliente y proporcione unas mediciones de los pseudorrangos a un servidor de localización situado a distancia el cual complete los cálculos para la solución de la posición mediante el uso de los pseudorrangos obtenidos a partir del receptor móvil del GPS y mediante el uso de los datos de las efemérides. La presente invención proporciona un procedimiento y un sistema mejorados que permiten la flexibilidad en el posicionamiento de los servidores de localización y, así mismo, proporciona una eficiencia y un coste mejorados en un sistema de cliente/servidor.
El documento US 5 225 842 describe un sistema de rastreo que emplea el GPS para proporcionar una información precisa de la posición, velocidad y tiempo de un vehículo u otros objetos en una estación de trabajo.
El documento WO 97/33382 describe un receptor del GPS que adquiere señales del GPS que incluyen los datos de almanaque de satélites procedentes de una estación de base y utiliza estos datos de almanaque para determinar los datos Doppler aproximados para los satélites a la vista del receptor del GPS, el receptor del GPS puede, así mismo, recibir las efemérides procedentes de la estación de base.
El documento EP 0 462 648 describe una técnica para la obtención de la información del rumbo del vehículo desde un GPS en base a una diferencia entre la dispersión de frecuencias de efectos Doppler sobre una señal recibida en el vehículo y la dispersión de frecuencias de efectos Doppler real sobre la señal procedente del satélite.
El documento US-A-5 477 458 describe un procedimiento y un aparato para proporcionar información...
Reivindicaciones:
1. Un sistema de procesamiento de la información de la posición de satélites, comprendiendo dicho sistema:
2. El sistema de la reivindicación 1, que comprende así mismo un receptor móvil (16, 17, 22, 75 a 80, 424) del SPS que puede ser accionado para determinar su propia posición mediante (a) la recepción de señales del SPS y la determinación de los pseudorrangos y (b) la recepción y utilización de dichos datos de las efemérides de los satélites desde dicho primer sistema de procesamiento digital (26, 50, 51, 115, 117, 312).
3. El sistema de las reivindicaciones 1 o 2, en el que dichos primeros datos de las efemérides de los satélites son recibidos desde un primer conjunto de satélites del SPS a la vista de dicho primer receptor de referencia (90 a 96, 104 a 108, 301) del SPS y en el que dichos segundos datos de las efemérides de los satélites son recibidos desde un segundo conjunto de satélites del SPS a la vista de dicho segundo receptor de referencia (90 a 96, 104 a 108, 301) del SPS.
4. El sistema de la reivindicación 3, en el que dicho medio de comunicación comprende una red en paquetes de datos (103), y en el que dicha primera interfaz de comunicación y dicha segunda interfaz de comunicación, respectivamente, suministran dichos primeros datos de las efemérides de los satélites y dichos segundos datos de las efemérides de los satélites en forma de datos en paquetes.
5. El sistema de la reivindicación 3, en el que dicho primer receptor de referencia (90 a 96, 104 a 108, 301) del SPS puede ser accionado para transmitir unos primeros datos de los pseudorrangos sobre dicho medio de comunicación y dicho segundo receptor de referencia (90 a 96, 104 a 108, 301) del SPS puede ser accionado para transmitir unos segundos datos de los pseudorrangos hacia dichos medios de comunicación y en el que dichos primeros datos de los pseudorrangos comprenden al menos uno de los primeros pseudorrangos hacia los satélites a la vista de dicho primer receptor de referencia (90 a 96, 104 a 108, 301) del SPS y unas primeras correcciones de los pseudorrangos para unos satélites a la vista de dicho primer receptor de referencia (90 a 96, 104 a 108, 301) del SPS.
6. El sistema de cualquier reivindicación precedente, en el que:
7. El sistema de la reivindicación 6, en el que dichos primeros paquetes son transmitidos hasta dicho medio de comunicación a una tasa de paquetes por segundo elevada.
8. El sistema de cualquier reivindicación precedente, en el que dicha información de los satélites comprende así mismo unos datos de predicción Doppler para dichos satélites a la vista de dicho receptor móvil (16, 17, 22, 75 a 80, 424) del SPS.
9. El sistema de cualquier reivindicación precedente, en el que dicha información de los satélites comprende así mismo unos datos de almanaque de los satélites.
10. Un procedimiento de procesamiento de la información de la posición de los satélites, comprendiendo dicho procedimiento:
11. El procedimiento de la reivindicación 10, que comprende así mismo la determinación, en el receptor móvil (16, 17, 22, 75 a 80, 424) del SPS, de su propia posición mediante (a) la recepción de las señales del SPS y la determinación de los pseudorrangos y (b) la recepción y utilización de los datos de las efemérides de los satélites desde el primer sistema de procesamiento digital (26, 50, 51, 115, 117, 312).
12. El procedimiento de las reivindicaciones 10 u 11, que comprende así mismo:
13. El procedimiento de la reivindicación 12, en el que dichos primeros datos de las efemérides de los satélites y dichos segundos datos de las efemérides de los satélites son transmitidos en forma de datos en paquetes.
14. El procedimiento de la reivindicación 12, que comprende así mismo:
15. El procedimiento de cualquier reivindicación 10 a 14, en el que:
16. El procedimiento de la reivindicación 15, en el que dichos primeros paquetes son transmitidos hasta dicho medio de comunicación a una tasa de transmisión d de paquetes por segundo elevada.
17. El procedimiento de cualquier reivindicación 10 a 16, en el que dicha información de los satélites comprende así mismo unos datos de predicción Doppler para dichos satélites a la vista de dicho receptor móvil (16, 17, 22, 75 a 80, 424) del SPS.
18. El procedimiento de cualquier reivindicación 10 a 17, en el que dicha información de los satélites comprende así mismo unos datos de almanaque de los satélites.
19. Un medio legible por computadora que comprende unas instrucciones almacenadas en aquél el cual, cuando son ejecutadas en un procesador, ejecuta las etapas del procedimiento correspondientes de cualquiera de las reivindicaciones 10 a 18.
Patentes similares o relacionadas:
 PROCEDIMIENTO Y APARATO DE AYUDA GPS EN UN SISTEMA DE COMUNICACION, del 9 de Julio de 2010, de QUALCOMM INCORPORATED: Un procedimiento de transmisión de información de ayuda a la localización para el cálculo de la posición de un satélite que incluye las etapas de:
a) la transmisión […]
PROCEDIMIENTO Y APARATO DE AYUDA GPS EN UN SISTEMA DE COMUNICACION, del 9 de Julio de 2010, de QUALCOMM INCORPORATED: Un procedimiento de transmisión de información de ayuda a la localización para el cálculo de la posición de un satélite que incluye las etapas de:
a) la transmisión […]
 METODO Y APARATO PARA UN SISTEMA DE NAVEGACION CON SUSCEPTIBILIDAD REDUCIDA A INTERFERENCIAS Y PERTURBACIONES, del 20 de Noviembre de 2009, de THE BOEING COMPANY: Un sistema de navegación que comprende: un receptor de referencia ; un receptor de usuario ; un satélite del sistema de posicionamiento […]
METODO Y APARATO PARA UN SISTEMA DE NAVEGACION CON SUSCEPTIBILIDAD REDUCIDA A INTERFERENCIAS Y PERTURBACIONES, del 20 de Noviembre de 2009, de THE BOEING COMPANY: Un sistema de navegación que comprende: un receptor de referencia ; un receptor de usuario ; un satélite del sistema de posicionamiento […]
 RECEPTOR GPS MEJORADO QUE UTILIZA UN ENLACE DE COMUNICACIONES, del 19 de Abril de 2010, de SNAPTRACK INC.: PROCEDIMIENTOS Y APARATOS PARA CALCULAR MEDIANTE UN RECEPTOR DE LOCALIZACION MEDIANTE SATELITES (SPS) UN DOPPLER APROXIMADO A PARTIR DE UNA […]
RECEPTOR GPS MEJORADO QUE UTILIZA UN ENLACE DE COMUNICACIONES, del 19 de Abril de 2010, de SNAPTRACK INC.: PROCEDIMIENTOS Y APARATOS PARA CALCULAR MEDIANTE UN RECEPTOR DE LOCALIZACION MEDIANTE SATELITES (SPS) UN DOPPLER APROXIMADO A PARTIR DE UNA […]
RECEPTOR GPS PERFECCIONADO QUE UTILIZA INFORMACIÓN DE LA POSICIÓN DE LOS SATÉLITES PARA COMPENSAR EL EFECTO DOPPLER, del 9 de Febrero de 2012, de SNAPTRACK INC.: Procedimiento para determinar la posición de una unidad remota , que comprende: recibir, en dicha unidad remota , datos de almanaque de […]
 PROCEDIMIENTO DE LOCALIZACIÓN DE POSICIÓN AISTIDA POR ESTACIÓN BASE QUE CONOCE EL LÍMITE DE DATOS, del 12 de Mayo de 2011, de QUALCOMM INCORPORATED: Dispositivo movil que comprende un receptor configurado para recibir una primera senal de un satelite, incluyendo la primera senal un mensaje de navegacion extendido […]
PROCEDIMIENTO DE LOCALIZACIÓN DE POSICIÓN AISTIDA POR ESTACIÓN BASE QUE CONOCE EL LÍMITE DE DATOS, del 12 de Mayo de 2011, de QUALCOMM INCORPORATED: Dispositivo movil que comprende un receptor configurado para recibir una primera senal de un satelite, incluyendo la primera senal un mensaje de navegacion extendido […]
 PROCEDIMIENTO Y APARATO PARA LA DETERMINACIÓN DEL TIEMPO EN UN SISTEMA DE POSICIONAMIENTO POR SATÉLITE, del 9 de Mayo de 2011, de SNAPTRACK INCORPORATED: Un procedimiento de resolución del tiempo de referencia en una primera entidad que recibe señales de distancias desde una pluralidad de satélites y que tiene una referencia […]
PROCEDIMIENTO Y APARATO PARA LA DETERMINACIÓN DEL TIEMPO EN UN SISTEMA DE POSICIONAMIENTO POR SATÉLITE, del 9 de Mayo de 2011, de SNAPTRACK INCORPORATED: Un procedimiento de resolución del tiempo de referencia en una primera entidad que recibe señales de distancias desde una pluralidad de satélites y que tiene una referencia […]
SISTEMA PARA SEGUIR LA TRAYECTORIA BASADO EN GPS, del 23 de Marzo de 2011, de SPORTVISION INC: Un método para seguir la trayectoria de un objeto, que comprende los pasos de: usar GPS para seguir la trayectoria del objeto; recibir datos GPS acerca […]
Sistema de posicionamiento para satélite artificial geoestacionario, del 18 de Marzo de 2020, de Sky Perfect JSAT Corporation: Sistema de medición de posición para un satélite artificial geoestacionario , comprendiendo el sistema: dos o más antenas, que incluyen, como […]