Sistema para la fabricación de engranajes, los cuales consisten de diferentes módulos de construcción (M,
A M, A 1, A 2, A 3, H an, H ab, A E), caracterizado en que, los módulos de construcción (M, AM, A1, A2, A3, Han, Hab, AE) pueden ser ensamblados como unidades modulares para formar engranajes distintos, y a través de la selección de la unidad receptora (AE) es posible producir un tipo de engranaje diferente con una cinemática distinta, ya sea un eje propulsor (AW) o bien una brida receptora (AF), además, mediante un montaje diferente de una rueda hueca (20) hacia la derecha o bien hacia la izquierda con las piezas de construcción adicionales, se puede conseguir un engranaje con cinemática SP o TP
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2003/005101.
F16H1/46MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16HTRANSMISIONES. › F16H 1/00 Transmisiones de engranajes para transmitir un movimiento rotativo (particulares para transmitir un movimiento rotativo con relación de velocidad variable, o para invertir el movimiento rotativo F16H 3/00). › Sistemas consistentes en varios trenes de engranajes, cada uno de los cuales implica engranajes orbitales.
F16H57/033F16H […] › F16H 57/00 Partes constitutivas generales de las transmisiones (de mecanismo husillo-tuerca F16H 25/00; de transmisiones por fluidos F16H 39/00 - F16H 43/00). › Cajas de engranajes en serie, p. ej. cajas de engranajes basadas en el mismo diseño disponibles en diferentes tamaños o cajas de engranajes que usan una combinación de varias unidades estándar.
Clasificación PCT:
F16H1/46F16H 1/00 […] › Sistemas consistentes en varios trenes de engranajes, cada uno de los cuales implica engranajes orbitales.
F16H57/02F16H 57/00 […] › Cajas de engranajes; Montaje de las transmisiones en el interior de aquéllas.
Clasificación antigua:
F16H1/46F16H 1/00 […] › Sistemas consistentes en varios trenes de engranajes, cada uno de los cuales implica engranajes orbitales.
F16H57/02F16H 57/00 […] › Cajas de engranajes; Montaje de las transmisiones en el interior de aquéllas.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
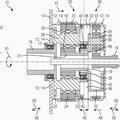
El presente invento se refiere a un sistema para la fabricación de engranajes, los cuales consisten de diferentes módulos de construcción. En el mercado ya se conocen engranajes que consisten de una, de dos o eventualmente de tres piezas de carcasa y que presentan los correspondientes pasos, pasos de transmisión, etc. Además, en el caso de los engranajes se conocen cinemáticas del tipo cinemática SP o TP. Cada uno de los engranajes está realizado como series, por ejemplo en la cinemática SP o en la cinemática TP. Para ello, o bien se realizan únicamente engranajes largos y rectos con una serie definida, o bien con módulos de construcción totalmente diferentes se pueden realizar engranajes cortos y gruesos, como por ejemplo un engranaje TP. Es por ello que solamente hay diferentes tipos de construcción básica, engranajes con diferentes cinemáticas. La DE 2649949 A describe un sistema de engranaje, en cuyo caso se pueden construir engranajes con diferentes pasos de transmisión en diferentes tamaños de construcción. En este caso algunas piezas de construcción aisladas pueden ser utilizadas simplemente para conseguir los diferentes tamaños de construcción. La EP 0687837 A conforme al género ofrece un sistema motor-engranaje, en cuyo caso encima de un motor propulsor se pueden colocar diferentes fases receptoras. En la US 3333482 se ha representado un motor eléctrico con un engranaje planetario acoplado a continuación, en cuyo caso el engranaje planetario está colocado de forma integrada dentro de la carcasa del motor eléctrico. Es por ello, que el presente invento tiene como objetivo crear un sistema de la manera anteriormente mencionada, el cual pueda ser utilizado de forma universal y en cuyo caso se puedan utilizar, al menos parcialmente, unidades de construcción para las más diversas cinemáticas y series básicas de engranajes. Para ello se debe minimizar el número de unidades de construcción para cualquier tipo de engranaje, en cuyo caso se deben realizar diferentes cinemáticas, relaciones de transmisión o bien flujos de potencia. Además, se deben reducir las piezas para conseguir la reducción de los gastos de producción. La consecución de dicho objetivo conlleva que los módulos de construcción puedan ser ensamblados de forma modular con el fin de conseguir diferentes engranajes, y que a través de la elección de la unidad receptora, como eje receptor o bien como brida receptora, y mediante el diferente montaje de una rueda hueca hacia la derecha o hacia la izquierda puedan ser fabricados engranajes diferentes con cinemáticas SP o TP. En el caso del presente invento se pueden fabricar engranajes de un paso, de dos pasos o bien de tres pasos con diferentes unidades receptoras, con los grupos modulares básicos esenciales, como por ejemplo el motor, la placa adaptadora de motor, la rueda de eje hueco del paso receptor, la rueda hueca del paso propulsor, así como también la unidad receptora, realizada como un eje receptor o una brida receptora. Para ello, la unidad receptora debe ser realizada como un eje receptor o como una brida receptora. Además, en el caso del presente invento es importante que una conexión distinta correspondiente de la rueda hueca del paso propulsor con un soporte de rueda planetario universal del paso propulsor pueda ser atornillada con la carcasa fija, a través de diferentes montajes, con el fin de realizar un engranaje de cinemática SP. En este caso, todos los engranajes pueden ser ensamblados con las mismas piezas básicas como un engranaje TP o SP, sin que se requiera la utilización de otras piezas de construcción adicionales. Al mismo tiempo dentro del sistema universal, o bien con los módulos universales, se puede fabricar un engranaje de un paso, de dos pasos o bien de tres pasos, elegible y con unidades. De este modo se reduce sustancialmente el número de todos los grupos modulares para diferentes cinemáticas de engranaje y para diferentes tipos de engranaje, ya sea largo o corto, o bien engranaje TP o SP. En este caso se pueden realizar diferentes cinemáticas además de relaciones de transmisión y flujos de potencia con los mismos módulos de construcción. Por otro lado, los diferentes módulos o bien las piezas de carcasa pueden ser atornillados o soldados entre sí, pegados o unidos entre ellos mediante uniones con arrastre de forma. Esto significa, además, que los engranajes específicamente conforme a los deseos de clientes, en especial en lo que se refiere a bridas, ejes, bridas receptoras, sensores, o similares, también pueden ser especificados muy fácilmente, ya que tan solo hay que especificar y adaptar este módulo de la unidad receptora, o bien del eje receptor o de la brida receptora. Para la fabricación de un 2 engranaje de un paso, de dos pasos o de tres pasos como una realización TP o SP, todos los demás módulos pueden conservar su forma original. Los módulos particulares correspondientes del eje receptor o de la brida receptora también pueden estar previstos de los correspondientes sensores o similares. Esto ha de encontrarse también dentro del marco del presente invento. La elección de los módulos de construcción receptores o bien de las unidades receptoras es especialmente adecuada para la especificación de engranajes para variaciones especiales conforme a a las especificaciones según los deseos de clientes, o similar. También se contempla dentro del marco del presente invento embridar de forma eventual diferentes motores y piezas adicionales a engranajes de uno, dos o tres pasos, realizados como engranajes de SP o TP. De este modo se genera un sistema universal, especialmente un sistema modular universal, que garantiza que los diferentes grupos modulares puedan ser ensamblados con el mismo número de grupos modulares para la fabricación de engranajes con diferentes cinemáticas, diferentes relaciones de transmisión seleccionables y diferentes realizaciones de engranajes, o bien tipos de engranajes como series de SP o TP. Esto supone un ahorro sustancial en los gastos de producción y garantiza al usuario que él mismo pueda ensamblar engranajes conforme a sus propias especificaciones. Otras ventajas, características y detalles del invento resultan de la siguiente descripción de ejemplos preferidos de ejecución como también según el dibujo; el cual muestra en: Figura 1a una distribución representada esquemáticamente de módulos de construcción distintos para la fabricación de diferentes engranajes, especialmente para la fabricación de un engranaje de uno, dos y tres pasos; Figura 1b vistas representadas esquemáticamente sobre un plano cinemático de un engranaje SP y un engranaje TP; Figura 2a y 2b: vistas en planta representadas esquemáticamente sobre un motor, así como también una placa adaptadora para un motor; Figura 3a y 3b: secciones longitudinales representadas esquemáticamente a través de dos piezas de construcción adicionales diferentes con un cubo de fijación y una rueda principal integrados; Figura 3c: sección longitudinal representada esquemáticamente a través de otra pieza adicional con una rueda principal integrada y una rueda planetaria; Figura 4: sección longitudinal representada esquemáticamente a través de la pieza rueda hueca de la fase propulsora; Figura 5: sección longitudinal representada esquemáticamente a través de otra pieza como rueda de eje hueco de la fase receptora; Figura 6a y 6b: sección longitudinal representada esquemáticamente a través de unidades receptoras, realizadas como una brida receptora AF o un eje receptor A W. Sistema S conforme a la Figura 1a para la fabricación de diferentes engranajes conforme al presente invento, engranajes de uno, de dos y de tres pasos con diferentes posibilidades, de ensamblar un engranaje de uno, dos o tres pasos a partir de diferentes módulos, en cuyo caso ciertos módulos iguales pueden ser utilizados en todos los engranajes. Cada engranaje puede ser utilizado también como un módulo de piezas con motor M, eventualmente placa adaptadora de motor A M, así como también la rueda de eje hueco H ab y una unidad receptora A E que ha sido representada aquí mediante línea discontinua. En este caso, como unidad receptora AE puede ser colocado opcionalmente un eje receptor AW o una brida receptora AF en forma de módulos a continuación de la rueda de eje hueco del paso receptor Hab. En el caso de que se quiera fabricar un engranaje de un paso se añaden entonces los módulos motor, eventualmente placa adaptadora de motor AM, una primera pieza adicional A 1, a continuación la rueda de eje hueco del paso receptor H ab y finalmente cualquier unidad receptora A E. A continuación de la rueda de eje hueco del paso receptor H ab se encuentra el eje receptor A W o bien la brida receptora A F como unidad receptora A E. La ejecución de la unidad receptora A E es seleccionable conforme a las especificaciones por... [Seguir leyendo]
Reivindicaciones:
1. Sistema para la fabricación de engranajes, los cuales consisten de diferentes módulos de construcción (M, A M, A 1, A 2, A 3, H an, H ab, A E), caracterizado en que, los módulos de construcción (M, AM, A1, A2, A3, Han, Hab, AE) pueden ser ensamblados como unidades modulares para formar engranajes distintos, y a través de la selección de la unidad receptora (AE) es posible producir un tipo de engranaje diferente con una cinemática distinta, ya sea un eje propulsor (AW) o bien una brida receptora (AF), además, mediante un montaje diferente de una rueda hueca (20) hacia la derecha o bien hacia la izquierda con las piezas de construcción adicionales, se puede conseguir un engranaje con cinemática SP o TP. 2. Sistema conforme a la reivindicación 1, caracterizado en que los módulos de construcción motor (M) y eventualmente placa adaptadora de motor (AM), rueda de eje hueco de la fase receptora (Hab) y unidades receptoras (AE), son iguales para todos los engranajes de las distintas series. 3. Sistema conforme a la reivindicación 1 ó 2, caracterizado en que un reductor de una etapa puede ser ensamblado a partir de los módulos de construcción motor (M), eventualmente placa adaptadora de motor (A M), y rueda de eje hueco (H ab). 4. Sistema conforme a la reivindicación 1 ó 2, caracterizado en que un engranaje de dos escalones puede ser ensamblado a partir de los módulos de construcción motor (M), eventualmente de la placa adaptadora de motor (AM), de la pieza añadida (A2), de la rueda del eje hueco de la fase propulsora (Han), de la rueda del eje hueco de la fase receptora (Hab), y de la unidad receptora (AE). 5. Sistema conforme a la reivindicación 1 ó 2, caracterizado en que un engranaje de tres fases está formado por los módulos de construcción motor (M), eventualmente de la placa adaptadora de motor (AM), de la pieza añadida (A2), de una pieza añadida adyacente (A3), a continuación de la rueda del eje hueco de la fase propulsora (Han), y a continuación de la rueda del eje hueco de la fase receptora (Hab) y de la unidad receptora (AE). 6. Sistema conforme a las reivindicaciones 4 y 5, caracterizado en que en el caso de diferentes engranajes de dos fases y de tres fases, los módulos de construcción motor (M), pieza añadida (A 2), rueda del eje hueco de la fase propulsora (H an), rueda del eje hueco de la fase receptora (H ab) y de la unidad receptora (A E) son idénticos. 7. Sistema conforme con al menos una de las reivindicaciones 1 hasta 6, caracterizado en que cada uno de los módulos de construcción (A M), (H ab), (A W), (A F), (A 1), (A 2), (H an) están unidos entre sí, especialmente soldados, presionados, atornillados o pueden ser unidos entre sí por medio de un arrastre de forma. 8. Sistema conforme con al menos una de las reivindicaciones 1 hasta 7, caracterizado en que la unidad receptora (AE) puede ser variada en función de los deseos del cliente, especialmente puede ser adaptada y realizada como un eje receptor (AW) específico según el cliente o como una brida receptora (AF) específica según el cliente. 9. Sistema conforme con al menos una de las reivindicaciones 1 hasta 8, caracterizado en que para la fabricación de un engranaje TP, una rueda hueca (20) de la rueda de eje hueco de la fase propulsora (H an) está fijamente conectada, y en especial fijamente atornillada en un soporte de ruedas planetarias (9) de la rueda de eje hueco de la fase receptora (H ab). 10. Sistema conforme con al menos una de las reivindicaciones 1 hasta 8, caracterizado en que para la fabricación de un engranaje SP una rueda hueca (20) de la rueda de eje hueco de la fase receptora (H ab) está fijamente conectada, y en especial fijamente atornillada con una parte de la carcasa estacional (3) de la pieza de construcción adicional (A 2). 11. Sistema conforme a la reivindicación 9, caracterizado en que el soporte universal de las ruedas planetarias (9) de la rueda de eje hueco de la fase receptora (Hab) está unido, especialmente soldado con una brida (16) o con un eje (18) del eje receptor (AW). 12. Sistema conforme con al menos una de las reivindicaciones 1 hasta 11, caracterizado en que la parte de la carcasa (10) de la rueda de eje hueco de la fase receptora (H ab) está conectada, y en especial soldada con la parte de la carcasa (14) de la brida receptora (A F) o con la carcasa (17) del eje receptor (A W). 8 9 11 12 13 REFERENCIAS CITADAS EN LA DESCRIPCIÓN La lista de referencias citada por el solicitante lo es solamente para utilidad del lector, no formando parte de los documentos de patente europeos. Aún cuando las referencias han sido cuidadosamente recopiladas, no pueden excluirse errores u omisiones y la OEP rechaza toda responsabilidad a este respecto. Documentos de patente citados en la descripción DE 2649949 A [0005] EP 0687837 A [0005] US 3333482 A [0006] 14
Patentes similares o relacionadas:
Sistema de medición y procedimiento de medición para la detección de variables sobre soportes planetarios de un engranaje planetario, del 19 de Febrero de 2020, de Flender GmbH: Sistema de medición para la detección de variables sobre soportes planetarios de un engranaje planetario que comprende al menos varios pasos de rueda planetaria […]
Transmisión de turbina eólica, del 12 de Febrero de 2020, de Flender GmbH: Transmisión de turbina eólica con una etapa de engranaje recto de alta velocidad , que comprende un engranaje recto HSS con un buje y una corona dentada y […]
Engranaje planetario multietapa para un aerogenerador con conducto especial de aceite lubricante, del 25 de Septiembre de 2019, de ZF FRIEDRICHSHAFEN AG: Engranaje planetario multietapa para una aerogenerador que comprende una primera etapa planetaria del lado de entrada alojada en una […]
Engranaje planetario con un soporte para portaplanetas mejorado, del 31 de Julio de 2019, de Flender GmbH: Engranaje planetario con una primera y una segunda etapa de engranaje , que comprende una carcasa y un primer árbol , el cual […]
Transeje de dos velocidades para vehículo eléctrico, del 6 de Junio de 2019, de Guangzhou Sunmile Dynamic Technologies Corp., LTD: Un transeje de dos velocidades para un vehículo eléctrico, que comprende: un motor eléctrico y un transeje que puede accionarse por […]
Sistema de transmisión de la potencia de turbina eólica, del 9 de Abril de 2019, de VESTAS WIND SYSTEMS A/S: Un sistema de transmisión de potencia para incrementar la velocidad de rotación desde un rotor de una turbina eólica , que comprende:
un árbol principal configurado […]
Dispositivo electromecánico, del 27 de Marzo de 2019, de The Switch Drive Systems Oy: Un dispositivo electromecánico que comprende:
- una estructura de interconexión mecánica para su conexión a un elemento rotativo externo,
[…]
Disposición de engranaje para una máquina centrifugadora, del 31 de Octubre de 2018, de GEA Mechanical Equipment GmbH: Disposición de engranaje para una máquina centrifugadora con tornillo sin fin, en particular una máquina centrifugadora con tambor macizo y tornillo sin […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 Engranaje planetario con un soporte para portaplanetas mejorado, del 31 de Julio de 2019, de Flender GmbH: Engranaje planetario con una primera y una segunda etapa de engranaje , que comprende una carcasa y un primer árbol , el cual […]
Engranaje planetario con un soporte para portaplanetas mejorado, del 31 de Julio de 2019, de Flender GmbH: Engranaje planetario con una primera y una segunda etapa de engranaje , que comprende una carcasa y un primer árbol , el cual […]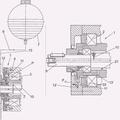 Disposición de engranaje para una máquina centrifugadora, del 31 de Octubre de 2018, de GEA Mechanical Equipment GmbH: Disposición de engranaje para una máquina centrifugadora con tornillo sin fin, en particular una máquina centrifugadora con tambor macizo y tornillo sin […]
Disposición de engranaje para una máquina centrifugadora, del 31 de Octubre de 2018, de GEA Mechanical Equipment GmbH: Disposición de engranaje para una máquina centrifugadora con tornillo sin fin, en particular una máquina centrifugadora con tambor macizo y tornillo sin […]