SISTEMA Y METODO PARA SU FUNCIONAMIENTO EN EL ESPACIO VIRTUAL 3D.
Sistema para la realización de una operación en un espacio tridimensional virtual,
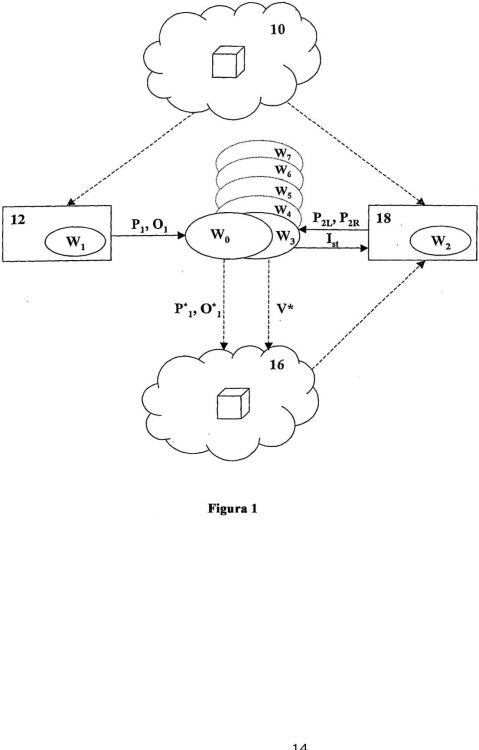
comprendiendo el - un sistema de visualización (18) para visualizar el espacio tridimensional virtual; - un sistema (12) de seguimiento de la posición en 3D para indicar en el espacio tridimensional real (10) la posición (P1) de la operación a realizar en el espacio tridimensional virtual (16), comprendiendo dicho sistema (12) de seguimiento de la posición en 3D unos medios de posicionamiento (135) dotados, por lo menos, de una fuente de señales (130), por lo menos, de dos sensores de imágenes (110) para detectar las señales emitidas por la, por lo menos una, fuente de señales (130) de los medios de posicionamiento (135) y unos primeros medios (W1) para determinar la posición (P1) en el espacio real de los medios de posicionamiento (135) con respecto a los sensores de imagen (110), en base a las señales generadas por los sensores de imagen (110) y a la localización espacial de los sensores de imagen (110) uno con respecto al otro, y - medios (W0) para indicar la posición (P1) del espacio tridimensional real (10) en el espacio tridimensional virtual (16) y realizar la operación en la posición indicada (P*1), caracterizado porque el sistema de visualización (18) para visualizar el espacio tridimensional virtual comprende: - medios para reproducir imágenes tridimensionales; - por lo menos, dos fuentes de señales luminosas (140) dispuestas en una posición fija con respecto a los ojos del usuario; - por lo menos, dos sensores de imágenes (110) para detectar las señales emitidas por las fuentes de señales (140); - unos segundos medios (W2) para determinar las posiciones en el espacio real (P2L, P2R) de los ojos del usuario en base a las señales generadas por los sensores de imágenes (110) del sistema de visualización (18); y - unos terceros medios (W3) para determinar el punto de visión (V*) del espacio tridimensional virtual en base a las posiciones (P2L, P2R) proporcionadas por los segundos medios (W2) y que generan para cada ojo una imagen correspondiente a una coincidencia del espacio tridimensional real (10) y el espacio tridimensional virtual (16)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/HU2005/000056.
Solicitante: 3D FOR ALL SZÁMÍTASTECHNIKAI FEJLESZTO KFT.
Nacionalidad solicitante: Hungría.
Dirección: RÁKÓCZI UT 68. 2. EM 14 1074 BUDAPEST HUNGRIA.
Inventor/es: RATAI,DANIEL.
Fecha de Publicación: .
Fecha Solicitud PCT: 24 de Mayo de 2005.
Clasificación Internacional de Patentes:
- G02B27/00T
- G02B27/22T
- G06F3/01B
- G06F3/01B2
- G06F3/033S
- G06F3/042 FISICA. › G06 CALCULO; CONTEO. › G06F PROCESAMIENTO ELECTRICO DE DATOS DIGITALES (sistemas de computadores basados en modelos de cálculo específicos G06N). › G06F 3/00 Disposiciones de entrada para la transferencia de datos destinados a ser procesados en una forma utilizable por el computador; Disposiciones de salida para la transferencia de datos desde la unidad de procesamiento a la unidad de salida, p. ej. disposiciones de interfaz. › mediante medios opto-electrónicos.
- H04N13/00S4T
Clasificación PCT:
- G06F3/01 G06F 3/00 […] › Disposiciones de entrada o disposiciones combinadas de entrada y salida para la interacción entre el usuario y el computador (G06F 3/16 tiene prioridad).
- G06F3/033 G06F 3/00 […] › Dispositivos de puntero desplazados o posicionados por el usuario; Sus accesorios (Digitalizadores caracterizados por el medio de transducción G06F 3/041).
Clasificación antigua:
- G06F3/033 G06F 3/00 […] › Dispositivos de puntero desplazados o posicionados por el usuario; Sus accesorios (Digitalizadores caracterizados por el medio de transducción G06F 3/041).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania.
Fragmento de la descripción:
La presente invención se refiere a un sistema y a un método para realizar operaciones en un espacio 3D virtual.
Los ordenadores personales ampliamente difundidos, utilizados corrientemente, están equipados con un dispositivo de visualización que proporciona imágenes en dos dimensiones. Sin embargo, los ordenadores del futuro 5 están enfrentados a un gran desafío en lo que se refiere a la visualización de imágenes tridimensionales. Actualmente existen ya en el mercado dispositivos de visualización para ordenadores capaces de visualizar un espacio tridimensional virtual. Entre éstos están los dispositivos de visualización que comprenden una pantalla fabricada mediante tecnología de alto nivel, que permiten detectar imágenes tridimensionales sin ningún dispositivo auxiliar, aunque existen asimismo dispositivos de visualización mucho más económicos que proporcionan la visión tridimensional, habitualmente mediante 10 la utilización de gafas especiales. Teniendo en cuenta que el objetivo de la aplicación de un ordenador es no solamente la visualización de la información sino también la introducción y el procesamiento de la información, en relación con los ordenadores adaptados a la visualización de imágenes tridimensionales, ha surgido la necesidad de introducir y procesar información espacial, es decir, para llevar a cabo operaciones en el espacio virtual tridimensional. Aunque hoy en día diversas compañías ofrecen sistemas informáticos diseñados para visualizar un espacio tridimensional virtual, 15 dichos sistemas informáticos disponibles principalmente para su utilización diaria en el hogar, las tecnologías 3D aplicadas a los mismos tienen una capacidad muy limitada o son muy costosas, y éste es el motivo por el que no han sido utilizadas con una difusión amplia hasta el momento actual. A continuación, se presentan brevemente algunos de los dispositivos y sistemas de la técnica anterior que son capaces de visualizar un espacio tridimensional virtual y permiten realizar operaciones en el mismo. 20
En lo que antecede y en la parte siguiente de la descripción se utiliza la expresión “espacio 3D” para un segmento bien definido del espacio, esto es, la expresión “espacio 3D real” significa un segmento del espacio real para localizar la posición de una operación a realizar mediante el desplazamiento de un dispositivo de posicionamiento, mientras que la expresión “espacio 3D virtual” significa un segmento de un espacio visualizado mediante unos medios de visualización en 3D. 25
El documento DE 10106850 A1 da a conocer un sistema de seguimiento de la posición para aplicaciones informáticas en 3D, en el que el sistema de seguimiento de la posición comprende un dispositivo de posicionamiento que puede desplazarse en el espacio, cuyo movimiento está indicado en el espacio tridimensional virtual. El dispositivo de posicionamiento está acoplado mediante resortes a carriles lineales dispuestos ortogonalmente cada uno con respecto a los otros, representando dichos carriles un sistema espacial de coordenadas. La localización 30 espacial del dispositivo de posicionamiento se detecta mediante un sistema potenciométrico. En este sistema de seguimiento de la posición, una posición espacial se detecta por medio de un conjunto mecánico que hace más difícil el accionamiento del dispositivo de posicionamiento y limita considerablemente las dimensiones del segmento de espacio disponible para localizar la posición de una operación.
En el documento GB 2388418 A se da a conocer un sistema de seguimiento de la posición todavía 35 más flexible en el que el sistema de seguimiento de la posición, cuyo funcionamiento se basa en principios ópticos, comprende un objeto tridimensional, por ejemplo, un cubo o una bola como dispositivo de posicionamiento, estando adaptado dicho objeto para poder ser desplazado libremente mediante las manos. Por medio de una cámara se graba la imagen del objeto. Los cambios en la posición espacial y en la orientación del dispositivo de posicionamiento se determinan a partir de las imágenes en dos dimensiones grabadas por la cámara. Aunque en este documento se 40 menciona asimismo la utilización de una segunda cámara, la función de esta cámara adicional está simplemente limitada a obtener información suplementaria de las partes ocultas o iluminadas con dificultad del dispositivo de posicionamiento. Un inconveniente adicional de este sistema es que el espacio virtual no está corregido con respecto al espacio real y, por consiguiente, el dispositivo de posicionamiento solamente puede ser utilizado para localizar posiciones relativas. 45
En el documento WO 03/079179 A1 se presenta una solución similar que da a conocer un dispositivo de posicionamiento como una realización de un ratón convencional de ordenador que puede desplazarse en el espacio. Dicho ratón espacial, así denominado, está dotado de una serie de fuentes luminosas y de una serie de microconmutadores, en el que las fuentes luminosas pueden tener colores, tamaños o formas diferentes, de manera que la cámara puede detectar el desplazamiento o la rotación del ratón espacial en cualquier dirección del espacio. Aunque 50 el ratón espacial anterior permite un posicionamiento muy flexible, su coste de fabricación es bastante elevado.
En el documento EP 1 335 317 A se da a conocer otro sistema de seguimiento de la posición.
El propósito de la visualización tridimensional es proporcionar la capacidad de detectar formas espaciales como una realidad, por parte de los seres humanos. El efecto espacial puede ser conseguido mediante la transmisión de imágenes diferentes al ojo izquierdo y al ojo derecho, ya que los ojos detectan por sí mismos las formas 55 espaciales desde posiciones diferentes. Para generar y detectar dicha imagen doble o estereoscópica, se han desarrollado diversas tecnologías. En el caso más sencillo, la imagen estereoscópica para los dos ojos se visualiza en una pantalla convencional de forma simultánea, y el efecto espacial puede ser detectado por medio de gafas especiales.
No obstante, existen dispositivos de visualización sofisticados y asimismo muy costosos que no precisan la utilización de dichas gafas o de cualquier otro dispositivo auxiliar, dado que la propia pantalla proporciona la visión estereoscópica.
Una de las soluciones más sencillas y más difundidas se basa en la separación de dos imágenes presentadas en el mismo lugar. En dichos sistemas, las imágenes para el ojo izquierdo y para el ojo derecho son visualizadas al mismo tiempo en la pantalla, y las dos imágenes son separadas por medio de gafas 3D especiales, de 5 tal forma que solamente se permite el paso de las imágenes para el ojo izquierdo a través de la lente de la izquierda, mientras que solamente se permite el paso de las imágenes para el ojo derecho a través de la lente de la derecha. A continuación, se presentarán algunos de los sistemas que funcionan en base a la separación de imágenes.
La idea central de la visualización 3D en base a la separación de colores, es que se generan dos imágenes de color diferente para el ojo izquierdo y para el ojo derecho y las dos imágenes de color diferente son 10 separadas por medio de lentes coloreadas. Con este objeto, generalmente se utiliza una lente roja y una lente cian. A través de la lente roja, solamente puede pasar la luz roja, mientras que a través de la lente cian, solamente puede pasar la luz cian. La ventaja de un sistema de separación de colores es su bajo precio, sin embargo, un inconveniente del mismo es que puede ser dañino para los ojos después de una utilización de 10 a 15 minutos, y otro inconveniente es que no está disponible para proporcionar una imagen tridimensional en color. 15
La idea central de los sistemas de polarización de la luz es que se generan imágenes polarizadas diferentes para el ojo izquierdo y para el ojo derecho, y las dos imágenes de polaridad distinta son separadas por medio de lentes de polarización. A diferencia de los sistemas de separación de colores, en un sistema de polarización de la luz pueden reproducirse imágenes en color totalmente realistas. Aunque los costes de fabricación de dichas lentes de polarización son relativamente reducidos, el dispositivo de visualización para reproducir la imagen estereoscópica 20 consistente en imágenes polarizadas en dos direcciones es muy costoso, sin embargo, esta solución es la más utilizada en las películas en 3D.
Los sistemas que utilizan las denominadas gafas de obturación funcionan de una manera...
Reivindicaciones:
1. Sistema para la realización de una operación en un espacio tridimensional virtual, comprendiendo el sistema
- un sistema de visualización (18) para visualizar el espacio tridimensional virtual;
- un sistema (12) de seguimiento de la posición en 3D para indicar en el espacio tridimensional real (10) la 5 posición (P1) de la operación a realizar en el espacio tridimensional virtual (16), comprendiendo dicho sistema (12) de seguimiento de la posición en 3D unos medios de posicionamiento (135) dotados, por lo menos, de una fuente de señales (130), por lo menos, de dos sensores de imágenes (110) para detectar las señales emitidas por la, por lo menos una, fuente de señales (130) de los medios de posicionamiento (135) y unos primeros medios (W1) para determinar la posición (P1) en el espacio real de los medios de posicionamiento (135) con 10 respecto a los sensores de imagen (110), en base a las señales generadas por los sensores de imagen (110) y a la localización espacial de los sensores de imagen (110) uno con respecto al otro, y
- medios (W0) para indicar la posición (P1) del espacio tridimensional real (10) en el espacio tridimensional virtual (16) y realizar la operación en la posición indicada (P*1), caracterizado porque el sistema de visualización (18) para visualizar el espacio tridimensional virtual comprende: 15
- medios para reproducir imágenes tridimensionales;
- por lo menos, dos fuentes de señales luminosas (140) dispuestas en una posición fija con respecto a los ojos del usuario;
- por lo menos, dos sensores de imágenes (110) para detectar las señales emitidas por las fuentes de señales (140); 20
- unos segundos medios (W2) para determinar las posiciones en el espacio real (P2L, P2R) de los ojos del usuario en base a las señales generadas por los sensores de imágenes (110) del sistema de visualización (18); y
- unos terceros medios (W3) para determinar el punto de visión (V*) del espacio tridimensional virtual en base a las posiciones (P2L, P2R) proporcionadas por los segundos medios (W2) y que generan para cada ojo una imagen correspondiente a una coincidencia del espacio tridimensional real (10) y el espacio tridimensional virtual (16). 25
2. Sistema, según la reivindicación 1, en el que los medios de posicionamiento (135) tienen la forma de una varilla con una fuente de señales dispuesta, por lo menos, en su extremo.
3. Sistema, según la reivindicación 1 ó 2, en el que los medios de posicionamiento (135) comprenden un pulsador (132) para indicar la posición.
4. Sistema, según cualquiera de las reivindicaciones 1 a 3, en el que los medios de posicionamiento 30 (135) comprenden cuatro fuentes de señales.
5. Sistema, según cualquiera de las reivindicaciones 1 a 4, en el que
- los medios para la reproducción de imágenes tridimensionales comprenden un dispositivo de visualización que reproduce imágenes diferentes (Ist) para el ojo izquierdo y para el ojo derecho del usuario y el correspondiente par de gafas (145) para la separación de imágenes; y 35
- las fuentes de señales dispuestas en una posición fija con respecto a los ojos del usuario están fijadas a dicho par de gafas (145).
6. Sistema, según la reivindicación 5, en el que dos fuentes de señales están fijadas a dicho par de gafas (145), estando situadas dichas fuentes de señales en una línea recta imaginaria que conecta las pupilas, a la misma distancia de un eje central (146) de dicho par de gafas (145). 40
7. Sistema, según la reivindicación 5, en el que una tercera fuente de señales está fijada adicionalmente a dicho par de gafas (145), a lo largo del eje central (146) de dicho par de gafas (145).
8. Sistema, según cualquiera de las reivindicaciones 5 a 7, en el que el sistema comprende además unos cuartos medios (W4) para indicar la posición y/o la orientación de dicho par de gafas (145) y/o cambios en las mismas en una instrucción operativa. 45
9. Sistema, según la reivindicación 8, en el que la instrucción operativa es un movimiento a realizar en el espacio tridimensional virtual (16).
10. Sistema, según cualquiera de las reivindicaciones 1 a 9, en el que las fuentes de señales son fuentes luminosas (130, 140, 141) que emiten luz visible.
11. Sistema, según cualquiera de las reivindicaciones 1 a 9, en el que las fuentes de señales son fuentes luminosas (130, 140, 141) que emiten luz infrarroja.
12. Sistema, según las reivindicaciones 10 ó 11, en el que la intensidad de las fuentes luminosas (130, 140, 141) es regulable.
13. Sistema, según cualquiera de las reivindicaciones 1 a 12, en el que se utilizan los mismos 5 sensores de imágenes (110) en el sistema de seguimiento (12) de la posición en 3D y en el sistema (18) para la visualización del espacio virtual en 3D.
14. Sistema, según cualquiera de las reivindicaciones 1 a 13, en el que los sensores de imágenes son cámaras (110) que graban imágenes en 2D.
15. Sistema, según la reivindicación 14, en el que cada cámara (110) comprende una unidad 10 hermética a la luz para impedir la incidencia de la luz difusa del entorno.
16. Sistema, según la reivindicación 4, en el que los primeros medios (W1) están adaptados para determinar tanto la posición en el espacio real (P1) como la orientación en el espacio real (O1) de los medios de posicionamiento (135) con respecto a los sensores de imágenes.
17. Sistema, según la reivindicación 5, en el que 15
- el dispositivo de visualización está adaptado para reproducir imágenes de colores diferentes para ambos ojos de forma simultánea; y
- dicho par de gafas (145) está adaptado para separar los colores diferentes visualizados para el ojo izquierdo y para el ojo derecho del usuario.
18. Sistema, según la reivindicación 5, en el que 20
- el dispositivo de visualización está adaptado para reproducir imágenes de polaridad diferente para ambos ojos de forma simultánea; y
- dicho par de gafas (145) está adaptado para separar las imágenes polarizadas de forma diferente para el ojo izquierdo y para el ojo derecho del usuario.
19. Sistema, según la reivindicación 5, en el que 25
- el dispositivo de visualización está adaptado para reproducir imágenes diferentes para ambos ojos de forma alternativa con una frecuencia predeterminada; y
- dicho par de gafas (145) está adaptado para hacer pasar las imágenes alternativas del dispositivo de visualización, de forma alternativa para el ojo izquierdo y para el ojo derecho del usuario de una forma sincronizada. 30
20. Sistema, según cualquiera de las reivindicaciones 1 a 19, en el que
- los medios de posicionamiento (135) comprenden además una unidad de vibración; y
- el sistema comprende además unos sextos medios (W6) para poner en funcionamiento la unidad de vibración de los medios de posicionamiento (135) cuando los medios de posicionamiento (135) llegan a una posición predeterminada (P1). 35
21. Sistema, según cualquiera de las reivindicaciones 5 a 20, en el que
- dicho par de gafas (145) comprende además una unidad de vibración; y
- el sistema comprende además unos séptimos medios (W7) para poner en funcionamiento la unidad de vibración de dicho par de gafas (145) cuando los medios de posicionamiento (135) llegan a una posición predeterminada (P2). 40
22. Método para llevar a cabo una operación en un espacio tridimensional virtual, comprendiendo el método las etapas de:
- visualizar un espacio tridimensional virtual (16);
- indicar, mediante el posicionamiento en el espacio tridimensional real (10), la posición (P1) de la operación a realizar en el espacio tridimensional virtual (16), en el que dicho posicionamiento comprende las etapas de 45 desplazar, por lo menos, una fuente de señales (130) fijada a unos medios de posicionamiento (135) a una posición seleccionada (P1) del espacio tridimensional real (10), detectando las señales emitidas, por lo menos,
por una fuente de señales (130), estando en la posición seleccionada (P1) mediante la utilización, por lo menos, de dos sensores de imágenes (110) y determinando la posición en el espacio real (P1) de los medios de posicionamiento (135) con respecto a los sensores de imágenes (110) en base a las señales generadas por los sensores de imágenes (110) y a la posición espacial de los sensores de imágenes (110), uno con respecto al otro; 5
- indicar la posición (P1) del espacio tridimensional real (10) en una posición (P*1) del espacio tridimensional virtual (16); y
- realizar la operación en el espacio tridimensional virtual (16) en la posición indicada (P*1);
caracterizado porque el espacio tridimensional (16) se visualiza mediante un sistema de visualización que comprende:
- medios para reproducir imágenes tridimensionales; 10
- por lo menos, dos fuentes de señales (140) dispuestas en una posición fija con respecto a los ojos del usuario;
- por lo menos, dos sensores de imágenes (110) para detectar las señales emitidas por las fuentes de señales (140);
- unos segundos medios (W2) para determinar las posiciones en el espacio real (P2L, P2R) de los ojos del usuario en base a las señales generadas mediante los sensores de imágenes (110) del sistema de visualización (18); y 15
- unos terceros medios (W3) para determinar el punto de visión (V*) del espacio tridimensional virtual en base a las posiciones (P2L, P2R) proporcionadas por los segundos medios (W2) y produciendo para cada ojo una imagen correspondiente a la coincidencia del espacio tridimensional real (10) y el espacio tridimensional virtual (16).
23. Método, según la reivindicación 22, en el que como fuente de señales se utiliza una fuente luminosa (130) que emite luz visible. 20
24. Método, según la reivindicación 22, en el que como fuente de señales se utiliza una fuente luminosa que emite luz infrarroja.
25. Método, según cualquiera de las reivindicaciones 22 a 24, en el que como sensores de imágenes se utilizan cámaras (110) que graban imágenes en 2D.
26. Método, según cualquiera de las reivindicaciones 22 a 25, en el que los medios de 25 posicionamiento (135) está dotados, por lo menos, de dos fuentes de señales y se determinan tanto la posición en el espacio real (P1) como la orientación (O1) de los medios de posicionamiento (135) con respecto a los sensores de imágenes.
27. Método, según la reivindicación 26, en el que los medios de posicionamiento (135) están dotados de cuatro fuentes luminosas (130). 30
28. Método, según cualquiera de las reivindicaciones 22 a 27, en el que se utilizan los mismos sensores de imágenes para visualizar el espacio tridimensional virtual (16) y para el posicionamiento.
29. Método, según cualquiera de las reivindicaciones 22 a 28, en el que la etapa de posicionamiento comprende la indicación de una posición puntual en el espacio tridimensional real (10).
30. Método, según cualquiera de las reivindicaciones 22 a 29, en el que la etapa de posicionamiento 35 comprende la indicación de una sección continua en el espacio tridimensional real (10).
Patentes similares o relacionadas:
Dispositivo integrado de tableta inteligente y método de montaje del mismo, del 17 de Junio de 2020, de Guangzhou Shirui Electronics Co., Ltd: Un PC de tableta inteligente de todo en uno, en el que el mismo comprende: una pantalla , un vidrio , un módulo táctil con infrarrojo, una carcasa trasera […]
Sistema de sensor multifunción, del 17 de Junio de 2020, de Sensobright Industries, LLC: Sistema de sensor (S) que comprende: - al menos una capa elástica ; - al menos una fuente de imagen situada bajo dicha capa elástica […]
Dispositivo y procedimiento de gobierno y aparato que incluye tal dispositivo, del 10 de Junio de 2020, de Sequeris: Dispositivo de gobierno , caracterizado por que incluye: - unos medios de detección configurados para proporcionar una posición de un […]
SISTEMA DE CONTROL OPTOELECTRÓNICO PARA PROYECCIONES, del 24 de Abril de 2020, de LÓPEZ PEÑARANDA, Pedro José: 1. Sistema de control optoelectrónico para proyecciones que contiene un mando transceptor capaz de trabajar en modo táctil, en el que transmite su posición mediante un […]
Pantalla de visualización, dispositivo de visualización y terminal móvil, del 22 de Abril de 2020, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Una pantalla de visualización que comprende una capa de visualización y una primera capa de protección contra la luz , teniendo […]
Teclado óptico para ubicaciones explosivas, del 11 de Marzo de 2020, de PR Electronics A/S: Un teclado óptico (1A) que comprende al menos un panel transparente que comprende una pluralidad de aberturas rodeadas de áreas cerradas , en […]
SISTEMA OPTICO ELECTRONICO MU LTI FUNCIONAL PARA INTERACCION TACTIL CON PANTALLAS Y PROYECTORES; Y METODO IMPLEMENTADO POR COMPUTADOR PARA APLICAR EN CONJUNTO CON DICHO SISTEMA OPTICO EL PROCESAMIENTO DE INFORMACION PARA PROCESOS DE ENSEÑANZA Y APRENDIZAJE, del 27 de Febrero de 2020, de ACCESO VIRTUAL - AULAS AMIGAS S.A.S: La presente solicitud satisface la necesidad de proporcionar un sistema para ayuda a la enseñanza que logre conectar a un proyector, televisor o pantalla para interacción […]
Pantalla de visualización, dispositivo de visualización y terminal móvil, del 26 de Febrero de 2020, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un dispositivo de visualización que comprende: una pantalla de visualización , un módulo de huella dactilar óptico , y un […]