Sistema y metodo para movimiento tridimensional de un objeto sujeto a una fuerza direccional.
Un sistema para facilitar el movimiento tridimensional de un objeto que comprende:
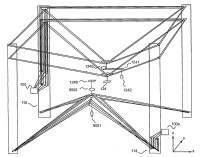
un conjunto no vacío de elementos de soporte de cordaje (120, 121, 122, 123) junto con un objeto (124);
un cordaje X (18) y un cordaje Y (19), unidos a una pluralidad de partes de dicho objeto (124) y en dondedicho cordaje X (18) y dicho cordaje Y (19) están configurados para moverse a través de dicho conjunto novacío de elementos de soporte de cordaje (120, 121, 122, 123);
un dispositivo de movimiento X (103) configurado para trasladar dicho cordaje X (18) para efectuar elmovimiento X de dicho objeto (124), y,
un dispositivo de movimiento Y (102) configurado para trasladar dicho cordaje Y (19) para efectuar elmovimiento Y de dicho objeto (124);
caracterizado porque el sistema comprende además:
un dispositivo de movimiento Z (104) configurado para desplazar dicho cordaje X (18) y dicho cordajeY (19) para efectuar el movimiento Z de dicho objeto (124) y en donde dicho cordaje X (18) y dichocordaje Y (19) son dos cordajes separados o dicho cordaje X (18) y dicho cordaje Y (19) son doslados de un cordaje.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2004/024321.
Solicitante: CableCam, LLC.
Inventor/es: RODNUNSKY,JIM, MACDONALD,S. ALEXANDER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64C17/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64C AEROPLANOS; HELICOPTEROS (vehículos de colchón de aire B60V). › B64C 17/00 Estabilización de aeronaves no prevista en otro lugar. › mediante aparatos giroscópicos (control por piloto automático B64C 13/18).
- B66C13/08 B […] › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 13/00 Otras características de estructura o detalles. › para depositar las cargas según una orientación o en una posición dadas.
- B66C21/00 B66C […] › Grúas de cables, es decir, cuyos dispositivos de elevación se desplazan sobre cables aéreos (adaptaciones de armazones que soportan las vías de rodadura B66C 6/00; accionamiento de cuerda o de cable para carros, combinaciones de esos accionamientos con el mecanismo de elevación B66C 11/16; sistemas ferroviarios B61B; mecanismos de enrollamiento de cuerda o de cables B66D 1/00).
- G06T13/00 FISICA. › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Animación.
PDF original: ES-2431521_T3.pdf
Fragmento de la descripción:
Sistema y metodo para movimiento tridimensional de un objeto sujeto a una fuerza direccional
ANTECEDENTES DE LA INVENCIÓN
CAMPO DE LA INVENCIÓN
Las realizaciones de la invención descritas en este documento pertenecen al campo de los sistemas de raíles de cordajes aéreos. En concreto, estas realizaciones permiten el movimiento de objetos dentro de un 5 espacio tridimensional.
DESCRIPCIÓN DEL ESTADO DE LA TÉCNICA RELACIONADO
Un sistema de raíles con cordaje aéreo consiste en un sistema basado en un cordaje o una cuerda elevada, a lo largo de la cual los objetos son transportados. Los sistemas de raíles de cordajes existentes están basados en grandes estructuras fijas y / o sistemas de control complejos con el fin de facilitar el movimiento de los objetos. Muchos de estos sistemas son poco prácticos o difíciles de utilizar ya que tales sistemas no suelen alcanzar satisfactoriamente el espectro completo de la plataforma de estabilidad, facilidad de control, un tamaño compacto, facilidad de transporte, velocidad, de soporte de carga, extensibilidad, facilidad de mantenimiento y estabilidad de la plataforma.
Los objetos han sido sujetados y movidos a través del espacio de tres dimensiones mediante cordajes y cordajes para diversos fines en el pasado. En el documento US494389 de Sherman concedido en 1893, se describe un dispositivo que permite el movimiento de un polipasto por un espacio tridimensional a través de una compleja 20 disposición de cordajes y poleas. Un sistema de tala de árboles se describe en el documento US 1782043 de Lawson concedido en 1926 en el que se emplean grandes cantidades de cordajes y enhebrado extensivo con el fin de suspender y mover los troncos a través de grandes distancias. Una grúa de cuerda similar se describe en el documento US3065861 de Cruciani concedido en 1960. Estos sistemas emplean generalmente uno o más cordajes elevados que están fuertemente estirados y de lisos que se suspende un objeto. Otras patentes tales 25 como el documento US3043444 de Melton concedida en 1962 y el documento FR2318664 de Kennedy concedida en 1977 toman un enfoque diferente para suspender y mover objetos a través de un espacio tridimensional mediante el uso de un cordaje por la polea de apoyo al cabrestante. Las patentes '444 y '664 minimizan la cantidad de cordajes en el sistema, pero no permiten un control sencillo de los cordajes en el sistema, ya que las velocidades y longitudes de cada cordaje deben cambiar de manera no uniforme dependiendo de la trayectoria del
movimiento del objeto sujetado.
Los sistemas de movimiento con cordajes mencionados anteriormente se utilizan generalmente para transportar equipo y materiales. Los sistemas simples con cordajes de soporte también se han utilizado para apoyar cámaras en el espacio tridimensional usando cuerdas con diversos grados de éxito. En el documento US367610 de 35 Fairman concedido en 1887, un globo se traslada con dos cuerdas tensoras, lo que permite a una cámara tomar fotos desde lugares elevados. En el documento US578980 de Eddy concedido en 1897, un grupo de cámaras es izada en una cuerda de cometa unido a un carrete con el fin de capturar fotografías panorámicas. En el documento US894348 de Seele concedido en 1908, una cámara se deja caer desde un globo en una esfera con el fin de eliminar los efectos no deseados de péndulo y efectos de movimiento del viento en la fotografía resultante que es 40 expuesta cuando una cadena de obturación se extiende completamente. La patente '348, puede posiblemente ser la primera patente que intenta aislar una cámara de aire de los efectos de las sacudidas del vehículo que la transporta. En el documento US1002897 de Brown concedida en 1911, una cámara está unida a un hilo de cometa con un contador de tiempo en la forma de una hélice que toma una imagen después de un cierto período de tiempo. En el documento US1301967 de Parks concedido en 1919, una cámara viaja a lo largo de la cuerda de 45 una cometa a un punto preestablecido , toma una fotografía y desciende automáticamente por el hilo de la cometa, de manera que la cometa no tiene que ser descendida entre fotografías.
Durante los años 20 se iniciaron trabajos sobre la estabilización de cámaras transportadas en vehículos, ya que el movimiento de los vehículos limitaba la calidad de las fotografías obtenidas. En el documento US1634950 de 50 Lucian concedido en 1927, se describe un montaje de cámara giro-estabilizado que estabiliza activamente una cámara en el terreno y gira ejes con el fin de mantener una cámara activamente aislada del movimiento angular no deseado en un vehículo, aéreo, terrestre o acuático portador de la cámara a través de un espacio tridimensional. Muchas otras patentes giro-estabilizadoras se otorgaron después de Lucian '950 y muestran una estabilización activa de los equipos cuando ese equipo se apoya en un vehículo en marcha.
En el documento US4710819 se describe un sistema de suspensión de cámara que utiliza un mínimo de al menos tres cordajes en el que cada cordaje tiene dos extremos con un extremo de cada uno unido de forma fija a un miembro de soporte del equipo y el otro extremo de cada cordaje unido de forma fija a un cabrestante. En entre los extremos fijados se encuentra una polea que se usa como un soporte para el cordaje para proporcionar un 60 desplazamiento vertical entre el suelo y el miembro de soporte del equipo. El movimiento se consigue mediante el enhebrado de los cordajes de entrada y salida en la posición de la cámara con el movimiento entre dos puntos, requiriendo generalmente que todos los cordajes se muevan al mismo tiempo a un ritmo diferente.
En el documento US4625938, se da a conocer un sistema de soporte de la cámara en el que una carga útil de la cámara se puede mover dentro del espacio de tres dimensiones de una manera que permite la estabilización 5 activa de la velocidad de la panorámica (eje vertical) del miembro de soporte del equipo.
En el documento US5440476 se describe un sistema de soporte de cordajes para los objetos en movimiento mediante la extensión y retracción de cuerdas independientes que se corresponden uno a uno con el número de tornos y poleas de soporte que sujetan un objeto central. Incluso un sencillo movimiento del eje requiere que todas las cuerdas cambien de longitud de una forma coordinada para evitar la holgura en las otras cuerdas que sujetan el objeto. El dispositivo '476 no puede ser operado en su mejor modo sin un sistema de control computerizado como es el caso de los dispositivos '938 y '819 mencionadas anteriormente.
En el documento US6566834, una invención se divulga en la que una carga útil puede ser movida y colocada angularmente dentro de un espacio tridimensional. La invención requiere un sistema de control por ordenador con el fin de calcular el cambio en las longitudes de las cuerdas de sujeción con el fin de mover la carga útil entre dos puntos. La invención parece requerir que en la plataforma haya electricidad y localiza los cabrestantes del sistema en la plataforma, lo que reduce aún más la capacidad de carga útil de la plataforma. Por otra parte, la invención no proporciona independencia simple de X, Y y Z para fines de control y parece que son necesarios complejos dispositivos de detección con el fin de mantener los cordajes tensados correctamente.
En el documento US5585707 se divulga una invención en la que un robot o una persona se pueden mover fácilmente dentro de un espacio tridimensional. La carga útil es limitada y la estructura de soporte es de pequeña escala. Si se quiere ampliar la estructura, obstáculos como los postes de una portería o postes de luz podrían inhibir el movimiento de la carga útil a través de un recorrido entre dos puntos definidos dentro del cubo, ya que son necesarios numerosos cordajes para practicar la invención. Además, la invención no parece permitir que el eje Z varíe debajo del cubo, y el tamaño de la estructura de soporte del cubo para dar servicio a un gran volumen de espacio serían extremadamente caros de construir en la escala requerida. Una vez más, se requiere un control complejo para mantener la tensión en todas las cuerdas en el nivel correcto durante el movimiento del equipo a sujetar.
En el documento US5568189 se divulga una invención para mover cámaras en un espacio tridimensional. Los problemas con la invención '189 se hacen evidentes cuando se trata de ampliar la escala del sistema. La figura 4 muestra claramente cómo los dos cordajes elevados paralelos se hunden hacia el interior, cuando la carga útil se 35 encuentra en el centro del espacio X, Y. Dado que la invención no utiliza carriles fuertes para soportar la cuerda del eje Y, la capacidad de carga de la invención depende de la fuerza... [Seguir leyendo]
Reivindicaciones:
1. Un sistema para facilitar el movimiento tridimensional de un objeto que comprende:
un conjunto no vacío de elementos de soporte de cordaje (120, 121, 122, 123) junto con un objeto (124) ;
un cordaje X (18) y un cordaje Y (19) , unidos a una pluralidad de partes de dicho objeto (124) y en donde dicho cordaje X (18) y dicho cordaje Y (19) están configurados para moverse a través de dicho conjunto no vacío de elementos de soporte de cordaje (120, 121, 122, 123) ;
un dispositivo de movimiento X (103) configurado para trasladar dicho cordaje X (18) para efectuar el movimiento X de dicho objeto (124) , y,
un dispositivo de movimiento Y (102) configurado para trasladar dicho cordaje Y (19) para efectuar el movimiento Y de dicho objeto (124) ;
caracterizado porque el sistema comprende además:
un dispositivo de movimiento Z (104) configurado para desplazar dicho cordaje X (18) y dicho cordaje Y (19) para efectuar el movimiento Z de dicho objeto (124) y en donde dicho cordaje X (18) y dicho cordaje Y (19) son dos cordajes separados o dicho cordaje X (18) y dicho cordaje Y (19) son dos lados de un cordaje.
3. El sistema de la reivindicación 1 o 2, caracterizado porque dicho dispositivo de movimiento X (103) comprende un motor de movimiento X junto con dicho cordaje X (18) , y, dicho dispositivo de movimiento Y (102) comprende un motor movimiento Y junto con el citado cordaje Y (19) , y, un motor de movimiento Z (101) está acoplado con dicho dispositivo de movimiento Z (104) .
4. El sistema de cualquiera de las reivindicaciones 1-3 que comprenda además enhebrado anidado.
6. El sistema de una cualquiera de las reivindicaciones 1-5 que comprenda además un aislador asociado con dicho objeto (124) .
7. El sistema de la reivindicación 6 en el que dicho aislador comprende estabilización pasiva o activa.
9. El sistema de cualquiera de las reivindicaciones 1-8 en el que dicho objeto (124) comprende además una cámara que apunta hacia abajo para la visualización remota de la posición de dicho objeto.
10. El sistema de cualquiera de las reivindicaciones 1-9, que comprende además al menos tres soportes (110, 112, 114) en el que dichos soportes (110, 112, 114) están posicionados a una altura que difiere de la elevación de dicho objeto (124 ) con respecto a un área de cobertura.
11. El sistema de cualquiera de las reivindicaciones 1-10 que comprende además un sensor para proporcionar prevención de colisiones entre dicho objeto (124) y / o dicho cordaje X (18) y / o dicho cordaje Y (19) y un objeto fijo o móvil.
12. Un método para facilitar el movimiento tridimensional de un objeto que comprende:
reubicación de un cordaje X (18) asociado con un objeto (124) en el que dicho cordaje X (18) se enhebra a través de una pluralidad de soportes (120, 121, 122, 123) para efectuar un movimiento X de dicho objeto (124) ; y ,
reubicación de un cordaje Y (19) asociado con dicho objeto (124) en el que dicha cordaje Y (19) se enhebra a través de dicha pluralidad de soportes (120, 121, 122, 123) para efectuar movimiento Y de dicho objeto (124) ;
caracterizado porque para efectuar un movimiento Z de dicho objeto, dicho cordaje X (18) y dicho cordaje Y (19) son desplazados, y en donde dicho cordaje X (18) y dicho cordaje Y (19) son dos cordajes separados o en la que dicho cordaje 5 X (18 ) y dicho cordaje Y (19) son los dos lados de un cordaje.
13. El método de la reivindicación 12 que además comprende: un aislamiento de dicho objeto (124) del
movimiento del cordaje. 10
14. El método de la reivindicación 12 o 13, que comprende además: estabilización pasiva de dicho objeto (124) del movimiento del cordaje.
15. El método de la reivindicación 12 o 13, que comprende además: estabilización activa de dicho objeto (124) del 15 movimiento del cordaje.
Patentes similares o relacionadas:
 Bastidor anti torsión, buque y procedimiento para hacer descender un objeto en una extensión de agua, del 27 de Mayo de 2020, de Jumbo Maritime B.V: Procedimiento para hacer descender un objeto en una extensión de agua desde un buque que flota sobre la extensión de agua, comprendiendo el buque un primer […]
Bastidor anti torsión, buque y procedimiento para hacer descender un objeto en una extensión de agua, del 27 de Mayo de 2020, de Jumbo Maritime B.V: Procedimiento para hacer descender un objeto en una extensión de agua desde un buque que flota sobre la extensión de agua, comprendiendo el buque un primer […]
Flujo de video modificado para soportar el control remoto de una grúa de contenedores, del 18 de Diciembre de 2019, de ABB SCHWEIZ AG: Un procedimiento para soportar el control remoto de una grúa de contenedores , estando configurada la grúa de contenedores para desplazar contenedores de una posición […]
Control de grúa automatizado teniendo en cuenta errores de medición que dependen del objeto de carga y de la posición, del 5 de Noviembre de 2019, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento de control para un sistema de transbordo que comprende una grúa pórtico para contenedores dispuesta sobre un suelo con un carro […]
Método para hacer funcionar al menos dos dispositivos de elevación en grupo, y conjunto que comprende al menos dos dispositivos de elevación, del 4 de Septiembre de 2019, de KONECRANES GLOBAL CORPORATION: Método para operar al menos dos engranajes de elevación en una operación grupal, en donde cada equipo de elevación tiene un polipasto, a través del cual un […]
Unidad de transporte, del 17 de Julio de 2019, de Hans Künz GmbH: Instalación de transporte para el transporte de al menos un contenedor o de otra carga, en la que la instalación de transporte presenta al menos un carro […]
Grúa de torre y procedimiento para el montaje de una pala de rotor de turbina eólica, del 22 de Mayo de 2019, de LIEBHERR-WERK BIBERACH GMBH: Grúa de torre con un torre compuesta de al menos un elemento de torre, en particular una pieza de rejilla, y preferentemente con un elemento de arriostramiento […]
Procedimiento de control para un sistema de grúa que incluye una viga de separación, del 8 de Mayo de 2019, de Nissan Motor Manufacturing (UK) Ltd: Un procedimiento para detectar una condición de fallo en un sistema de grúa, el sistema de grúa que comprende una viga de separación […]
Agarradera para aparato de manipulación de carga y grúa, del 14 de Marzo de 2019, de KONECRANES GLOBAL CORPORATION: Una agarradera para un aparato de manipulación de carga, que comprende un dispositivo de medición de la distancia óptica y medios de sujeción (106, […]