SISTEMA Y MÉTODO DE MEDICIÓN DE DIMENSIONES DE UN PAQUETE.
Un sistema de medición de dimensiones de un paquete que comprende:
sensores de imagen, en particular cámaras de exploración en línea, orientadas para captar la imagen de un paquete; un subsistema de formación de imágenes configurado para unir juntas las salidas de los sensores de imagen para producir al menos una imagen en dos dimensiones que consta de una pluralidad de pixeles; un subsistema de dimensiones generales que incluye información de dimensiones generales de paquetes; y un subsistema de dimensionado fino configurado para determinar mediciones de dimensiones del paquete utilizando al menos una imagen en dos dimensiones y la información de las dimensiones generales del paquete, caracterizado porque el subsistema de dimensiones generales incluye al menos una unidad configurada para medir las dimensiones del paquete y porque el subsistema de dimensionado fino está configurado para determinar las dimensiones del paquete con mayor precisión basado en las dimensiones generales del paquete conocidas a partir del subsistema de dimensiones generales
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2007/008460.
Solicitante: SICK, INC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 6900 WEST, 110TH STREET MINNEAPOLIS, MN 55438 ESTADOS UNIDOS DE AMERICA.
Inventor/es: BIAN, LONG XIANG, DWINELL,John.
Fecha de Publicación: .
Fecha Solicitud PCT: 4 de Abril de 2007.
Clasificación Internacional de Patentes:
- G01B11/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00).
- G06T7/60A
- G07B17/00F3
Clasificación PCT:
- G01B11/02 G01B […] › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › para la medida de la longitud, la anchura o el espesor (G01B 11/08 tiene prioridad).
- G06T7/60 G […] › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › G06T 7/00 Análisis de imagen. › Análisis de los atributos geométricos.
- G07B17/00 G […] › G07 DISPOSITIVOS DE CONTROL. › G07B APARATOS DE ENTREGA DE TIQUES; TAXIMETROS; DISPOSICIONES O APARATOS PARA COBRAR EN UN PUNTO DE CONTROL EL PRECIO DE LOS BILLETES O LOS DERECHOS DE ENTRADA O DE PEAJE; APARATOS PARA FRANQUEAR. › Aparatos para franquear.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2357982_T3.pdf

Fragmento de la descripción:
CAMPO DE LA INVENCIÓN
El sujeto de esta invención se refiere principalmente a envíos de paquetería y a sistemas de clasificación.
ANTECEDENTES DE LA INVENCION
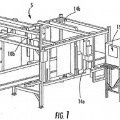
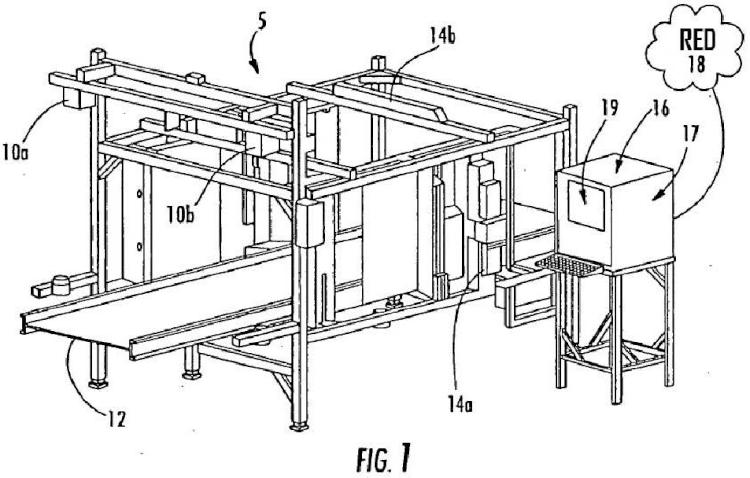
En una instalación moderna de envíos de paquetería, los paquetes avanzan sobre una cinta transportadora y un sistema de dimensionado situado por encima determina altura, anchura y longitud de los paquetes individuales. Diversos sistemas de dimensionado se basan en diferentes tecnologías. Hay sistemas de dimensionado por laser, sistemas por escaneo, sistemas de cámara/laser CCD por diodo de triangulado tal como el Dimensioner DM-3000 (Accu-Sort), y sistemas emisores-receptores LED.
A continuación del sistema de dimensionado típicamente se encuentra un sistema descodificador de códigos de barras. De nuevo se dispone de varias tecnologías incluyendo escáneres por laser y creadores de imágenes y cámaras lectoras en línea tales como la serie de cámaras SICK MVS. A veces, el sistema de dimensionado proporciona una salida al sistema descodificador de códigos de barras para enfocarlos en el paquete.
Con objeto de que el sistema de dimensionado sea “legal para el comercio” se deben cumplir ciertos requisitos. Los sistemas de dimensionado conocidos, de ahora en adelante “sistemas o subsistemas “de dimensionado general”, están limitados principalmente por su precisión que se refiere como ‘d'. Las normativas dictan que un objeto menor de 12 d en cualquier dimensión no se puede considerar como legal para el comercio. Véase el manual 44 de la Conferencia Nacional de Pesos y Medidas y la Publicación 14 de NTEP. Otros países tienen requerimientos similares. El estado actual de la técnica de sistemas de dimensionado generales ofrece 0,2 pulgadas x d. Esto significa que cualquier objeto con cualquier dimensión menor de 2,4 pulgadas en cualquiera de sus dimensiones no es legal para el comercio. Así, muchos sistemas actuales o de dimensionado general no son suficientemente precisos para medir un paquete con una dimensión muy pequeña, en un ejemplo, una caja de 14 pulgadas de longitud por 16 pulgadas de anchura, pero solamente con 2 pulgadas de altura (p. e. un marco de cuadro.)
El documento US 4,972,494 describe un sistema de inspección de paquetes con un ordenador que almacena los datos de referencia que son representativos de la configuración de paquetes deseada. Esto se compara con una plantilla de salida desde una cámara de exploración (escaneado) en línea. En otra realización, se utilizan cámaras de matriz. Las imágenes de las cámaras se analizan y se comparan con los parámetros de los datos de referencia.
En el documento US 6,064,759, una máquina de inspección asistida por ordenador utiliza luz estructurada y cámaras de visión de máquina para inspeccionar un objeto junto con el modelo geométrico del objeto.
El documento US 6,064,629 utiliza una pluralidad de barreras de luz para controlar la cadencia de objetos que se desplazan en una cinta transportadora. El sistema también incluye una báscula y un sistema de cubicación basados en sensores ultrasónicos.
SUMARIO DE LA INVENCIÓN
Por consiguiente un objeto de esta invención es proporcionar un sistema y método más preciso de dimensionado de paquetes.
Un objeto adicional de esta invención es proporcionar un sistema y método tales que reduzcan el coste y la complejidad de determinar las dimensiones de un paquete.
Un objeto adicional de esta invención es proporcionar un sistema y método que cumpla los requisitos de dimensionado legal para el comercio.
Un objeto adicional de esta invención es proporcionar un sistema y método tales que se puedan llevar a cabo principalmente en software.
La invención expuesta resulta de la realización de que se pueden determinar dimensiones más precisas de un paquete utilizando las dimensiones generales como se determinan, por ejemplo, mediante un sistema de dimensionado típico o general, en combinación con una imagen en dos dimensiones obtenida utilizando un explorador de una dimensión.
No obstante, la invención expuesta, en otras realizaciones no necesita alcanzar todos estos objetivos y sus reivindicaciones no deben estar limitadas a estructuras o métodos capaces de alcanzar estos objetivos
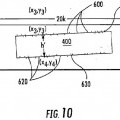
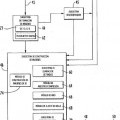
Esta invención, como se define por las reivindicaciones adjuntas, caracteriza un sistema de medición de dimensiones de paquetes que incluye sensores orientados a producir la imagen de un paquete, un subsistema de producción de imágenes configurado para unir juntas las salidas de los sensores de imágenes para producir al menos una imagen en dos dimensiones compuesta por una pluralidad de pixeles, y un subsistema de dimensiones generales que incluye la información de las dimensiones generales del paquete. Para determinar las mediciones de las dimensiones del paquete, utilizando al menos una imagen en dos dimensiones y la información general de las dimensiones del paquete se configura un subsistema de dimensionado fino. En una realización se configura el subsistema de configurado fino para situar puntos sobre el paquete en la imagen en dos dimensiones utilizando la información de dimensiones generales del paquete, calcular los pixeles de un punto hasta otro punto, y convertir el número de pixeles en una medición de dimensión. El punto puede estar situado en un borde de la imagen en dos dimensiones del paquete, y/o al menos uno de los puntos puede ser una esquina de la imagen en dos dimensiones del paquete. En una configuración, los sensores de producción de imágenes son cámaras de exploración en línea. Las mediciones de dimensiones serán mediciones legales para el comercio. En una realización, el subsistema de dimensionado fino se configura para situar un punto sobre el paquete en la imagen en dos dimensiones determinando las coordenadas en pixeles de un punto en el paquete en la imagen en dos dimensiones, llevando a cabo exploraciones
o escaneos en línea lo más próximas al punto, calculando un valor numérico promedio de los pixeles en cada exploración en línea, detectando un cambio importante en el valor numérico promedio de los pixeles de las exploraciones en línea más próximas a las coordenadas en pixeles del punto, y estableciendo las coordenadas en pixeles del punto en valores de coordenadas en pixeles en los que se detectó el cambio importante en el valor numérico de los pixeles de los exploraciones en línea.
En un ejemplo, el subsistema de dimensionado fino se configura para convertir el número de pixeles en una medición de dimensionado determinando puntos por pulgada desde los sensores de imagen y multiplicando el número de pixeles calculados por los puntos por pulgada. En una variación, el subsistema de dimensionado fino se configura para calcular el número de pixeles de un punto a otro punto determinando la diferencia entre los valores de coordenadas en pixeles de los dos puntos. En una realización, el subsistema de dimensionado fino se configura para crear una cartografía de los puntos en la imagen en dos dimensiones, y desde la cartografía se puede configurar para formular una línea, que representa el borde del paquete en la imagen en dos dimensiones. El subsistema de dimensionado fino se puede configurar adicionalmente para llevar a cabo detecciones de múltiples niveles y para establecer las coordenadas en pixeles del punto utilizando sub-muestreos de la al menos una imagen en dos dimensiones. El subsistema de dimensionado fino se puede configurar también para establecer las coordenadas en pixeles de cuatro esquinas del paquete en al menos una imagen en dos dimensiones, y se puede configurar además para establecer las coordenadas en pixeles de cuatro esquinas de cada cara del paquete. El sistema de producción de imágenes se puede configurar para almacenar en la memoria la al menos una imagen en dos dimensiones del paquete. En una configuración, el sistema de medición de mediciones del paquete incluye un sistema descodificador de códigos de barras configurado para descodificar cualquier código de barras en el paquete, y los datos de códigos de barras y de mediciones de dimensiones del paquete se integran y se visualizan.
Esta invención caracteriza también un sistema de medición de dimensiones de un paquete que incluye sensores de imagen orientados a producir una imagen de un paquete, un subsistema de producción de imagen configurado para unir juntas salidas de los sensores productores de imagen para producir al menos una imagen en dos dimensiones compuesta... [Seguir leyendo]
Reivindicaciones:
1. Un sistema de medición de dimensiones de un paquete que comprende:
sensores de imagen, en particular cámaras de exploración en línea, orientadas para captar la imagen de un paquete;
un subsistema de formación de imágenes configurado para unir juntas las salidas de los sensores de imagen para producir al menos una imagen en dos dimensiones que consta de una pluralidad de pixeles;
un subsistema de dimensiones generales que incluye información de dimensiones generales de paquetes; y
un subsistema de dimensionado fino configurado para determinar mediciones de dimensiones del paquete utilizando al menos una imagen en dos dimensiones y la información de las dimensiones generales del paquete,
caracterizado porque
el subsistema de dimensiones generales incluye al menos una unidad configurada para medir las dimensiones del paquete y porque el subsistema de dimensionado fino está configurado para determinar las dimensiones del paquete con mayor precisión basado en las dimensiones generales del paquete conocidas a partir del subsistema de dimensiones generales.
2. El sistema de la reivindicación 1 en el que el subsistema de dimensionado fino se configura para:
situar puntos en el paquete en la imagen en dos dimensiones utilizando la información de las dimensiones generales del paquete, calcular el número de pixeles desde un punto a otro punto, y convertir el número de pixeles en una medición de dimensión.
3. El sistema de la reivindicación 1 ó 2 en el que el subsistema de dimensionado fino se configura para situar un
punto en el paquete en al menos una imagen de dos dimensiones: determinando las coordenadas en pixeles de un punto en el paquete en al menos una imagen en dos dimensiones;
realizando exploraciones en línea lo más próximas a dicho punto; calculando un valor numérico medio de los pixeles en cada exploración en línea; detectando un cambio significativo en el valor numérico medio de los pixeles de las exploraciones en línea más
próximas a las coordenadas en pixeles de dicho punto; y estableciendo las coordenadas en pixeles de dicho punto en valores de coordenadas en pixeles en los que se detecte el cambio significativo del valor numérico promedio de los pixeles de las exploraciones en línea.
4. El sistema de cualquiera de las reivindicaciones precedentes en el que el subsistema de dimensionado fino se configura para convertir el número de pixeles en una medición de dimensión:
determinando los puntos por pulgada desde los sensores de imagen; y multiplicando el número de pixeles calculados por los puntos por pulgada.
5. El sistema de cualquiera de las reivindicaciones 2 a 4 en el que el subsistema de dimensionado fino se configura además para crear una cartografía de dichos puntos en la imagen en dos dimensiones y desde dicha cartografía se formula una línea que representa un borde del paquete en la imagen en dos dimensiones.
6. El sistema de cualquiera de las reivindicaciones 2 a 5 en el que el subsistema de dimensionado fino se configura además para llevar a cabo una detección de múltiples niveles y fijar las coordenadas en pixeles del punto utilizando submuestreos de al menos una imagen en dos dimensiones.
7. El sistema de cualquiera de las reivindicaciones 2 a 6 en el que los puntos se sitúan en un borde de la imagen en dos dimensiones del paquete y/o en el que al menos un punto es una esquina de la imagen en dos dimensiones del paquete.
8. El sistema de cualquiera de las reivindicaciones precedentes en el que el subsistema de dimensionado fino se configura además para establecer las coordenadas en pixeles de cuatro esquinas del paquete en al menos una imagen en dos dimensiones o para establecer las coordenadas en pixeles de las cuatro esquinas de cada cara del paquete
9. El sistema de cualquiera de las reivindicaciones precedentes que incluye además un subsistema descodificador de códigos de barras configurado para descodificar cualquier código de barras en el paquete, en el que en particular se integran y visualizan los datos del código de barras y las mediciones de las dimensiones del paquete.
10. Un método de medición de las dimensiones de un paquete que comprende:
producir la imagen de un paquete utilizando sensores de imagen, en particular cámaras de exploración en línea;
mantener unidas las salidas de los sensores de imágenes para producir al menos una imagen en dos dimensiones que consta de una pluralidad de pixeles; y
determinar las mediciones de dimensiones del paquete utilizando al menos una imagen de dos dimensiones e información de general de dimensiones del paquete
caracterizado porque la información general de dimensiones del paquete se determina mediante al menos una
unidad configurada para medir las dimensiones del paquete, y porque las dimensiones del paquete se determinan con
más precisión basadas en las dimensiones generales del paquete.
11. El método de la reivindicación 10 que incluye además:
situar puntos en el paquete en la imagen en dos dimensiones utilizando la información de dimensiones generales del paquete;
calcular el número de pixeles de un punto a otro punto en al menos una imagen en dos dimensiones; y
convertir el número de pixeles en una medición de dimensión.
12. El método de la reivindicación 10 ó 11 que incluye además:
determinar las coordenadas en pixeles de un punto en el paquete, en al menos una imagen en dos dimensiones;
llevar a cabo exploraciones en línea lo más próximo a dicho punto;
calcular un valor numérico promedio de los pixeles en cada exploración en línea;
detectar un cambio importante en el valor numérico promedio de los pixeles de los escaneos en línea de más próximos a las coordenadas en pixeles de dicho punto; y
establecer las coordenadas en pixeles de dicho punto en valores en los que se detecto el cambio importante en el valor numérico promedio de los pixeles de los escaneos en línea.
13. El método de la reivindicación 11 ó 12 que incluye además crear una cartografía de dichos puntos en la imagen en dos dimensiones y formular a partir de dicha cartografía una línea que representa un borde de la imagen en dos dimensiones del paquete.
14. El método de cualquiera de las reivindicaciones 11 a 13 que incluye además conducir una detección de múltiples niveles y establecer las coordenadas en pixeles de dicho punto utilizando el submuestreo de al menos una de las imágenes en dos dimensiones.
15. El método de cualquiera de las reivindicaciones 11 a 14 en el que dichos puntos están situados en un borde de la imagen en dos dimensiones del paquete y/o en el que al menos un punto es una esquina de la imagen en dos dimensiones del paquete y/o en el que al menos un punto es una esquina de la imagen en dos dimensiones del paquete, incluyendo además el método, establecer las coordenadas en pixeles de cuatro esquinas de cada cara del paquete.
Patentes similares o relacionadas:
DISPOSITIVO DE MEDICIÓN DE COTAS GEOMÉTRICAS, del 2 de Julio de 2020, de EMPRESA DE TRASPORTE MASIVO DEL VALLE DE ABURRA LTDA. - METRO DE MEDELLIN LTDA: La presente invención se refiere a dispositivos y métodos de medición de cotas geométricas en cables de un teleférico para verificar que el desplazamiento del cable […]
Sistema de medición óptica, del 10 de Junio de 2020, de METRONOR A/S: Un sistema para la medición de coordenadas espaciales y/o la orientación de una sonda , que comprende: a) un primer sensor de dirección espacial […]
Procedimiento y sistema para la calibración de un sistema de visión por ordenador, del 1 de Abril de 2020, de Oy Mapvision Ltd: Procedimiento para la calibración de un sistema de visión por ordenador tridimensional, comprendiendo dicho procedimiento las etapas de: disponer […]
Dispositivo de control tridimensional sin contacto de una pieza hueca con superficie interna de revolución y procedimiento correspondiente, del 1 de Abril de 2020, de DWFritz Automation, Inc: Dispositivo de control tridimensional sin contacto de una pieza hueca con superficie interna de revolución, denominada pieza hueca que va a controlarse, comprendiendo […]
Detección de posición, del 18 de Marzo de 2020, de Airbus Operations Limited: Aparato para determinar la posición de un objeto que tiene uno o más elementos magnéticos , el aparato comprende una […]
Método y sistema para inspeccionar una pieza de trabajo, del 18 de Marzo de 2020, de THE BOEING COMPANY: Un método para inspeccionar una pieza de trabajo , comprendiendo dicho método: la introducción de datos del modelo asociado con la pieza de trabajo […]
 Métodos y sistemas de unión ala-fuselaje, del 29 de Enero de 2020, de THE BOEING COMPANY: Un metodo de union ala-fuselaje para una aeronave , comprendiendo el metodo:
(a) calcular un ajuste virtual entre un conjunto […]
Métodos y sistemas de unión ala-fuselaje, del 29 de Enero de 2020, de THE BOEING COMPANY: Un metodo de union ala-fuselaje para una aeronave , comprendiendo el metodo:
(a) calcular un ajuste virtual entre un conjunto […]
PROCEDIMIENTO DE CARACTERIZACION DE ELEMENTOS REFLECTORES A PARTIR DE LOS HACES DE LUZ REFLEJADOS EN LOS MISMOS, del 27 de Enero de 2020, de FUNDACION CENER-CIEMAT: Dispositivo, sistema y procedimiento de caracterización de elementos reflectores a partir de los haces de luz reflejados en los mismos y en […]