SISTEMA Y MÉTODO PARA LA IDENTIFICACIÓN DE MANIOBRAS PARA UN VEHÍCULO EN SITUACIONES DE CONFLICTO.
Un método de identificación de maniobras para un vehículo (200) en situaciones de conflicto entre el vehículo y por lo menos otro objeto (202),
el método comprende: para determinadas condiciones de vehículo y objeto, calcular una pluralidad de puntos de elusión en los que el vehículo (200) eludirá un impacto con el por lo menos otro objeto (202) por un intervalo de distancias de elusión; representar los puntos de elusión de tal manera que una pluralidad de puntos de elusión en los que el vehículo (200) eludiría el impacto por una determinada distancia de elusión indicativa de un determinado grado de conflicto es visualmente distinguible de otros puntos de elusión en los que el vehículo (200) eludiría el impacto por distancias de elusión mayores indicativas de un menor grado de conflicto, en cuyo caso la representación indica distintos grados de conflicto potencial para presentar con ello en una representación de visión direccional (212, 214) una serie de maniobras disponibles para el vehículo (200) de acuerdo con distintos grados de conflicto
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/AU2007/000179.
Solicitante: COMMONWEALTH SCIENTIFIC AND INDUSTRIAL RESEARCH ORGANISATION.
Nacionalidad solicitante: Australia.
Dirección: LIMESTONE AVENUE CAMPBELL, ACT 2612 AUSTRALIA.
Inventor/es: GATES,David John, GATES,Elliot Ashley, WESTCOTT,Mark, FULTON,Neale Leslie.
Fecha de Publicación: .
Fecha Solicitud PCT: 20 de Febrero de 2007.
Clasificación Internacional de Patentes:
- G08G3/02 FISICA. › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 3/00 Sistemas de control del tráfico para los vehículos marinos (marcado de las rutas de navegación B63B 51/00). › Sistemas anticolisión.
- G08G5/00F2
- G08G5/04E
Clasificación PCT:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2360471_T3.pdf



Fragmento de la descripción:
Ámbito de la invención
Las realizaciones de la presente invención se dirigen a un sistema y método para la identificación de maniobras para un vehículo en situaciones de conflicto. Las realizaciones de la presente invención tienen aplicación en particular pero no exclusiva a un sistema de representación de aeronaves para eludir colisiones entre aviones en el aire, o por el contrario para interceptar una amenaza en el aire. Además, se apreciará que las realizaciones de la invención también pueden utilizarse en buques marinos con fines similares.
Tal como se utiliza en esta memoria la expresión "vehículo" no se limita a los vehículos convencionales, tales como 10 aviones, barcos, coches, etc., sino que también incluye a los vehículos sin ocupantes.
Tal como se utiliza en esta memoria la expresión "situación de conflicto" se debe tomar en un sentido amplio y se refiere a una situación en la que el vehículo puede entrar en conflicto con otro objeto en el sentido de que haya un impacto o una elusión cercana o próxima entre el vehículo y el otro objeto. La expresión incluye pero no se limita a un impacto por parte del vehículo, elusión cercana y la interceptación de amenaza. Tal como se utiliza en esta memoria la expresión "condición" se refiere a diversos parámetros asociados con un vehículo o un objeto. Estos incluyen, pero no se limitan a, la posición (incluyendo la altitud), orientación, rumbo, velocidad, aceleración, etc.
Antecedentes de la invención
Se conocen sistemas anti-colisión en vehículos. Los sistemas que se utilizan actualmente emplean visualizaciones de la propia región del vehículo que son derivados de los sistemas basados en sensores la inercia, radar y sonar, y proporcionan una representación visual de la existencia de otro vehículo. Tales sistemas proporcionan información limitada sobre la forma de cómo alejarse de cualquier posible conflicto.
Un ejemplo de un sistema utilizado actualmente en las aeronaves es el Sistema de Alerta de Tráfico y Evasión de Colisión (TCASII: Traffic Alert and Collision Avoidance System). Cuando una segunda aeronave, conocida como el intruso, se detecta en el sistema de a bordo de la primera aeronave, una señal de alerta se transmite a la tripulación de cabina. Esto se conoce como una señal de asesoramiento de tráfico. Entonces, el sistema emite una instrucción audible y visual para que el piloto ascienda o descienda. Esto se conoce como una señal de asesoramiento de resolución.
Una señal de asesoramiento de tráfico similar es recibida por la tripulación de la segunda aeronave si está equipada. Sin embargo, la instrucción de asesoramiento de resolución recibida en la segunda aeronave (si está equipada) es la opuesta a la dada a la primera aeronave. El sistema por lo tanto proporciona una sugerencia de maniobra (ya sea ascender o descender) a las dos aeronaves para eludir una colisión. Aunque hay una representación en cabina para el sistema, es muy críptica y podría no identificar visualmente a una segunda aeronave en la región del conflicto.
Como se mencionó anteriormente, TCASII proporciona sólo una opción para ascender o descender al piloto para eludir el conflicto. El piloto no recibe instrucciones de giros ni cambios de velocidad. Además, el sistema TCASII no puede manejar de manera adecuada múltiples aeronaves en una zona de colisión potencial.
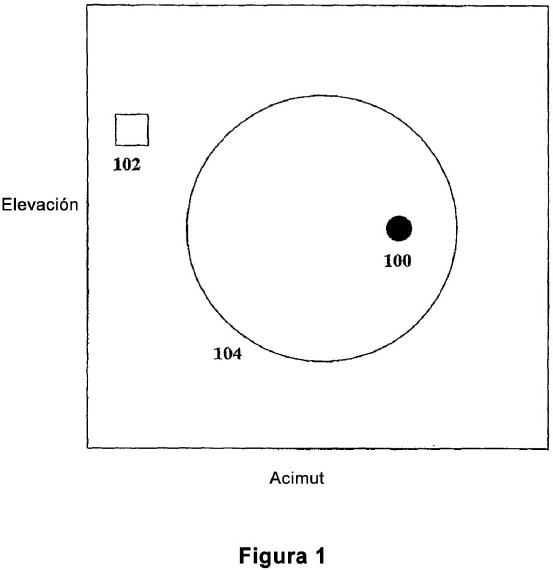
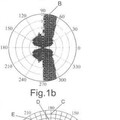
Otro sistema de la técnica anterior para la identificación de conflictos es la representación de radar aire-aire. Tal representación se utiliza generalmente en aeronaves de combate y no se implementa en vehículos civiles. La Figura 1 muestra las principales características de la representación que se utiliza principalmente para apuntar a aviones
40 enemigos en combate aire-aire (Figura de referencia: Shaw, R.L., (1988) Combate de cazas (Figther Combat): El arte y la ciencia del combate aire-aire (The Art and Science of Air-to-Air Combat), Patrick Stephens Limited). Cuando un objetivo está fuera de alcance, la representación simplemente dirige a la aeronave, o la aeronave propia/embarcación propia, en un curso de colisión con el objetivo. El piloto puede conseguir la dirección deseada dirigiendo el punto 100 con el fin de colocarlo en el centro de la representación.
45 La representación de la Figura 1 es esencialmente una proyección del rectángulo frontal de las direcciones escaneadas por los sensores de la propia embarcación, tales como un radar. De este modo, una dirección en 3D se convierte en un punto en 2D en la representación. La línea de visión directa (LOS: Line of Sight) 102 del objetivo se convierte en un punto, que en este caso está representado por un cuadrado para diferenciarlo de otros símbolos representados al piloto. El círculo 104 de error de dirección permitido (ASE: Allowed Steering Error) indica un
50 intervalo de posibles direcciones de lanzamiento. Es decir, cuando el punto de dirección 100 se encuentra dentro del círculo 104, el lanzamiento puede tener éxito. La representación puede contener otras informaciones como el tiempo y la distancia hasta el punto de interceptación (no se muestra). Se apreciará que esta representación también puede actuar como un sistema para eludir colisiones, en el que el piloto simplemente dirige la propia embarcación alejándola del objetivo.
Un sistema adicional de la técnica anterior se describe en la patente de EE.UU. nº. 6.970.104 de Knecht y Smith. Aquí, la información de vuelo se utiliza para calcular una región de conflicto dentro de una región accesible de la propia embarcación. La representación ofrece al piloto una representación tridimensional artificial (orientación, velocidad y altitud) de una región de conflicto. La representación no muestra posiciones tridimensionales relativas a la propia embarcación, y muestra sólo un espacio de maniobra en relación con la región de conflicto. Es decir, el piloto debe identificar una región alejada de la región del conflicto, calcular la orientación, la velocidad y la altitud necesarias a partir de la representación, a continuación, maniobrar la propia embarcación de acuerdo con estos cálculos.
La región de conflicto de Knecht y Smith se calcula a partir de supuestos acerca de cómo ambas aeronaves podrían girar, ascender, descender, acelerar o frenar. De este modo, su región de conflicto requiere a la vez suposiciones cuestionables y un procesamiento considerable de datos, en lugar de información incontrovertible y la representación de los datos directamente significativos.
Además, el piloto no está informado del nivel de peligro asociado con la orientación, la velocidad y la altitud elegidas.
El piloto podría estar colocando la propia aeronave en una situación de conflicto futuro, si la región del conflicto está 15 justo más allá del horizonte de tiempo elegido (mirando hacia adelante unos minutos) y por lo tanto no se visualiza.
El documento US 2004/143393 describe una representación tridimensional en la que se visualizan las regiones de conflicto (CR). Las regiones fuera de las regiones de conflicto se definen como espacio de maniobra. Según este documento, el piloto es aconsejado sobre el cambio de la trayectoria del vehículo para que pase las regiones de conflicto tan cerca como sea posible, con el fin de tener la más mínima oportunidad como sea posible de maniobra. Por lo tanto, todos los puntos fuera de las regiones de conflicto son puntos perdidos y reciben el atributo del mismo grado de conflicto potencial, mientras que los puntos dentro de las regiones de conflicto también reciben el atributo del mismo grado de conflicto.
Por lo tanto, es necesario proporcionar una representación para un vehículo para informar de inmediato al piloto del vehículo de una situación de conflicto potencial, y proporcionar una indicación en cuanto al nivel de peligro inherente de las maniobras potenciales del vehículo.
Resumen de la invención
Las realizaciones de la presente invención tienen por objeto ayudar a proporcionar una alternativa a los sistemas y los métodos conocidos para la identificación de las maniobras deseables de vehículos en situaciones de conflicto.
Los aspectos de la invención se proporcionan en las reivindicaciones que se acompañan. En términos generales, una realización de la presente invención se refiere a un sistema y un método para la identificación de las maniobras de un vehículo en situaciones de conflicto entre el vehículo y por lo menos... [Seguir leyendo]
Reivindicaciones:
1. Un método de identificación de maniobras para un vehículo (200) en situaciones de conflicto entre el vehículo y por lo menos otro objeto (202), el método comprende:
para determinadas condiciones de vehículo y objeto, calcular una pluralidad de puntos de elusión en los que el 5 vehículo (200) eludirá un impacto con el por lo menos otro objeto (202) por un intervalo de distancias de elusión;
representar los puntos de elusión de tal manera que una pluralidad de puntos de elusión en los que el vehículo (200) eludiría el impacto por una determinada distancia de elusión indicativa de un determinado grado de conflicto es visualmente distinguible de otros puntos de elusión en los que el vehículo (200) eludiría el impacto por distancias de elusión mayores indicativas de un menor grado de conflicto. en cuyo caso la representación indica distintos grados de conflicto potencial para presentar con ello en una representación de visión direccional (212, 214) una serie de maniobras disponibles para el vehículo (200) de acuerdo con distintos grados de conflicto.
2. El método según la reivindicación 1, en el que las pluralidades visualmente distinguibles de puntos de elusión se caracterizan por asignaciones isométricas.
15 3. El método según la reivindicación 2, en el que las pluralidades visualmente distinguibles de puntos de elusión se caracterizan por bandas de color.
4. El método según cualquiera de las reivindicaciones anteriores, en el que la pluralidad de puntos de elusión se calcula mediante coordenadas de alta resolución.
5. El método según la reivindicación 1, y que comprende además:
20 repetir las etapas definidas en la reivindicación 1 para otras condiciones de vehículo y de objeto por las que se actualiza el intervalo representado de maniobras disponibles, de acuerdo con los cambios en las condiciones del vehículo y el otro objeto.
6. El método según la reivindicación 5, en el que la representación de vista direccional es una representación monocroma.
7. El método según la reivindicación 5, en el que la representación de vista direccional es una representación en color.
8. El método según la reivindicación 1, y que comprende además:
para unas determinadas condiciones de vehículo y objeto, calcular la ubicación de por lo menos un punto de colisión
(218) en el que el vehículo impactará con el otro objeto, y representar el por lo menos un punto de colisión (218) en la representación de vista direccional.
9. El método según cualquiera de las reivindicaciones anteriores, en el que el vehículo es una primera aeronave, y el por lo menos otro objeto es una segunda aeronave.
10. Un sistema de identificación de maniobras para un vehículo (200) en situaciones de conflicto entre el vehículo y el por lo menos otro objeto (202), el sistema comprende:
35 para unas determinadas condiciones de vehículo y objeto, unos medios para calcular una pluralidad de puntos de elusión en los que el vehículo (200) eludirá un impacto con el por lo menos otro objeto (202) por un intervalo de distancias de elusión;
unos medios para representar los puntos de elusión de tal manera que una pluralidad de puntos de elusión en los que el vehículo (200) eludiría el impacto por una determinada distancia de elusión indicativa de un determinado
40 grado de conflicto es visualmente distinguible de otros puntos de elusión, en los que el vehículo (200) eludiría el impacto por distancias de elusión mayores indicativas de un menor grado de conflicto.
en cuyo caso la representación indica distintos grados de conflicto potencial para presentar con ello en una representación de visión direccional (212, 214) una serie de maniobras disponibles para el vehículo (200) de acuerdo con distintos grados de conflicto.
45 11. El sistema según la reivindicación 10, en el que las pluralidades visualmente distinguibles de puntos de elusión se caracterizan por asignaciones isométricas.
12. El sistema según la reivindicación 11, en el que las pluralidades visualmente distinguibles de puntos de elusión se caracterizan por bandas de color.
13. El sistema según cualquiera de las reivindicaciones 10 a 12, en el que la pluralidad de puntos de elusión se calcula mediante coordenadas de alta resolución.
14. El sistema según la reivindicación 10, que comprende además:
repetir los cálculos definidos en la reivindicación 10 para otras condiciones de vehículo y de objeto por las que se 5 actualiza el intervalo representado de maniobras disponibles, de acuerdo con los cambios en las condiciones del vehículo y el otro objeto.
15. El sistema según la reivindicación 14, en el que la representación de vista direccional es una representación monocroma.
16. El sistema según la reivindicación 14, en el que la representación de vista direccional es una 10 representación en color.
17. El sistema según la reivindicación 10, que comprende además:
para unas determinadas condiciones de vehículo y objeto, unos medios para calcular la ubicación de por lo menos un punto de colisión (218) en el que el vehículo impactará con el otro objeto, y unos medios para representar el por lo menos un punto de colisión (218) en la representación de vista direccional.
15 18. El sistema según la reivindicación 17, que comprende además unos medios para calcular y representar indicaciones numéricas del tiempo y la distancia del vehículo desde el por lo menos un punto de colisión.
19. El sistema según cualquiera de las reivindicaciones 10 a 18, en el que el vehículo es un buque.
20. Un método para interceptar un objeto, que comprende,
proporcionar un vehículo para interceptar el objeto; para determinadas condiciones del vehículo y el objeto, calcular una pluralidad de puntos de elusión en los que el vehículo eludiría un impacto con el objeto por un amplio intervalo de distancias de elusión;
representar los puntos de elusión de tal manera que una pluralidad de puntos de elusión en los que el vehículo eludiría el impacto con la aeronave objeto por una determinada distancia de elusión indicativa de un determinado grado de conflicto es visualmente distinguible de otros puntos de elusión en los que el vehículo (200) eludiría el impacto con el objeto por distancias de elusión mayores indicativas de un menor grado de conflicto.
en cuyo caso la representación indica distintos grados de conflicto potencial para presentar con ello en una representación de visión direccional una serie de maniobras disponibles para que el vehículo intercepte el objeto de acuerdo con distintos grados de conflicto.
21. Lógica incorporada en un medio legible por ordenador para implementar el método de la reivindicación 1 30 o la reivindicación 20.
Patentes similares o relacionadas:
Método para determinar la temporización de la recepción de un mensaje de radio, del 13 de Marzo de 2019, de True Heading AB: Método para determinar el tiempo de recepción por un receptor de radio de un mensaje AIS (Sistema de Identificación Automático) […]
 Sistema de ayuda anticolisión para buques (SAAB), del 25 de Febrero de 2014, de UNIVERSIDAD DE CADIZ: Sistema de ayuda anticolisión para buques.
Se trata de un sistema de apoyo al oficial de guardia de los buques, para la toma de decisiones […]
Sistema de ayuda anticolisión para buques (SAAB), del 25 de Febrero de 2014, de UNIVERSIDAD DE CADIZ: Sistema de ayuda anticolisión para buques.
Se trata de un sistema de apoyo al oficial de guardia de los buques, para la toma de decisiones […]
 Sistema y método para decodificar señales de un sistema de identificación automática, del 12 de Febrero de 2014, de COM DEV INTERNATIONAL LIMITED: Un método para producir segmentos de mensaje de Sistema de Identificación Automática (AIS)decodificados validados a partir de […]
Sistema y método para decodificar señales de un sistema de identificación automática, del 12 de Febrero de 2014, de COM DEV INTERNATIONAL LIMITED: Un método para producir segmentos de mensaje de Sistema de Identificación Automática (AIS)decodificados validados a partir de […]
 Dispositivo para controlar la seguridad, del 5 de Marzo de 2013, de MACTAGGART SCOTT (HOLDINGS) LTD.: Un método de producir una salida que corresponde con la habilidad parallevar a cabo una operación dentro de un límite de seguridad en un buque […]
Dispositivo para controlar la seguridad, del 5 de Marzo de 2013, de MACTAGGART SCOTT (HOLDINGS) LTD.: Un método de producir una salida que corresponde con la habilidad parallevar a cabo una operación dentro de un límite de seguridad en un buque […]
SISTEMA QUE INDICA UNA POSICION., del 16 de Enero de 1998, de GP & C SYSTEMS INTERNATIONAL AB: UNA PLURALIDAD DE OBJETOS MOVILES COMO AVIONES SON PROVISTOS CON RECEPTORES GPS, HABILITANDO LA DETERMINACION DE LONGITUD Y LATITUD. ADEMAS, EL RECEPTOR TAMBIEN DARA UN TIEMPO […]
PROCESO DE CODIFICACION PARA SISTEMA ANTICOLISION PARA LA NAVEGACION MARITIMA., del 1 de Enero de 1997, de THOMSON-CSF: EL SISTEMA DE LA INVENCION COMPRENDE, PARA CADA BARCO EQUIPADO, UN EMISOR QUE EMITE DE MANERA REPETITIVA LAS COORDENADAS GEOGRAFICAS, LA VELOCIDAD […]
 SISTEMA DE INFORMACION DE ATRAQUE PARA EMBARCACIONES, del 16 de Abril de 2008, de RAYTHEON COMPANY: Sistema para proporcionar información de navegación a un operador de un barco, comprendiendo el sistema: un sistema de radar acoplado al barco ; […]
SISTEMA DE INFORMACION DE ATRAQUE PARA EMBARCACIONES, del 16 de Abril de 2008, de RAYTHEON COMPANY: Sistema para proporcionar información de navegación a un operador de un barco, comprendiendo el sistema: un sistema de radar acoplado al barco ; […]
 DISPOSITIVO EN UN VEHICULO EN VUELO Y UN PROCEDIMIENTO PARA PREVENIR COLISIONES, del 25 de Mayo de 2010, de SAAB AB: Un dispositivo en un vehículo en vuelo que comprende
- un sistema de control de vuelo dispuesto para controlar el comportamiento del vehículo […]
DISPOSITIVO EN UN VEHICULO EN VUELO Y UN PROCEDIMIENTO PARA PREVENIR COLISIONES, del 25 de Mayo de 2010, de SAAB AB: Un dispositivo en un vehículo en vuelo que comprende
- un sistema de control de vuelo dispuesto para controlar el comportamiento del vehículo […]