SISTEMA PARA LA MEDIDA "IN SITU" DE LA RESISTENCIA AL CORTE Y LA FUERZA DE FRICCION EN SUELOS.
Sistema para la medida "in situ" de la resistencia al corte y la fuerza de fricción en suelos.
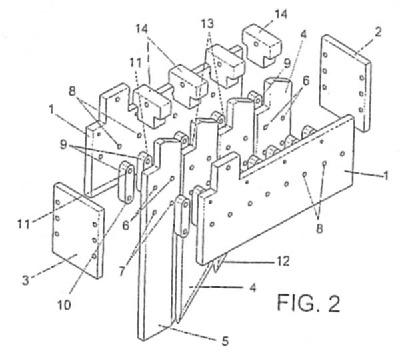
El sistema define un equipo que permite conocer la resistencia que el suelo ofrece cuando es cortado, así como la fuerza de rozamiento por unidad de superficie que ejerce el suelo sobre cuchillas (4) y (5) montadas sobre un bastidor (1), cortando cada cuchilla (4) a distinta profundidad, permitiendo medir simultáneamente la fuerza de corte a distintos niveles de profundidad. Las cuchillas de corte (4) y de fricción (5), situada por detrás de aquéllas, van montadas mediante un sistema de cuadrilátero articulado formado por parejas de barras verticales (9) situadas a ambos lados de las cuchillas (4) y (5), de manera que en combinación con una célula de carga asociada a cada cuchilla (4 ó 5), es posible conocer separadamente la resistencia al corte y la fuerza de fricción del suelo
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200800700.
Solicitante: UNIVERSIDAD DE CORDOBA.
Nacionalidad solicitante: España.
Provincia: CÓRDOBA.
Inventor/es: GIL RIBES,JESUS, AGUERA VEGA,JUAN, CASTRO GARCIA,SERGIO, BLANCO ROLDAN,GREGORIO LORENZ.
Fecha de Solicitud: 11 de Marzo de 2008.
Fecha de Publicación: .
Fecha de Concesión: 1 de Marzo de 2011.
Clasificación Internacional de Patentes:
- B23D15/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23D CEPILLADO; MORTAJADO; CIZALLADO; BROCHADO; ASERRADO; LIMADO; RASPADO; OPERACIONES ANALOGAS NO PREVISTAS EN OTRO LUGAR, PARA EL TRABAJO DE METALES CON ARRANQUE DE MATERIAL (fabricación de ruedas dentadas o de órganos similares B23F; corte del metal por calentamiento localizado B23K; dispositivos para copiar o controlar B23Q). › Máquinas de cizallar o dispositivos de cizallado que cortan por medio de hojas que se desplazan paralelamente las unas respecto a las otras.
- G01N3/58 FISICA. › G01 METROLOGIA; ENSAYOS. › G01N INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS (procedimientos de medida, de investigación o de análisis diferentes de los ensayos inmunológicos, en los que intervienen enzimas o microorganismos C12M, C12Q). › G01N 3/00 Investigación de las propiedades mecánicas de los materiales sólidos por aplicación de una incitación mecánica. › Investigación de la mecanizabilidad por herramientas de corte; Investigación de la aptitud al corte de herramientas.
Clasificación PCT:
- B23D15/00 B23D […] › Máquinas de cizallar o dispositivos de cizallado que cortan por medio de hojas que se desplazan paralelamente las unas respecto a las otras.
- G01N3/58 G01N 3/00 […] › Investigación de la mecanizabilidad por herramientas de corte; Investigación de la aptitud al corte de herramientas.
Fragmento de la descripción:
Sistema para la medida "in situ" de la resistencia al corte y la fuerza de fricción en suelos.
Objeto de la invención
La presente invención, según se expresa en el enunciado de esta memoria descriptiva, se refiere a un sistema de medida "in situ" de la resistencia al corte y la fuerza de fricción en los suelos, previsto para poder operar a distintos niveles de profundidad mediante cuchillas muy delgadas, y permitir conocer la resistencia que el suelo ofrece cuando es cortado, así como la fuerza de rozamiento por unidad de superficie que ejerce el suelo sobre materiales metálicos.
El sistema se encuadra en el sector de la instrumentación de medida y ensayo de suelos, especialmente para uso agrícola, forestal o ganadero, pudiendo ser igualmente utilizado en suelos destinados a la construcción de edificaciones y obras públicas, e incluso en el sector de la maquinaria agrícola y de obras públicas, ya que permite aportar información para mejorar los diseños de máquinas que trabajan el suelo.
Antecedentes de la invención
Las actuales técnicas de agricultura de precisión permiten el manejo de los suelos de labor con un mayor conocimiento de sus necesidades y de las consecuencias de las operaciones efectuadas. Pero para ello es necesario disponer de información pormenorizada para la caracterización de las parcelas de cultivo y poder detectar en ellas las zonas con mayor o menor necesidad de laboreo. Uno de los indicadores que mejor reflejan las necesidades de laboreo de un suelo es su estado de compactación, el cual se ha venido estimando hasta ahora mediante su resistencia a la penetración, medida con penetrómetros de punta cónica normalizados según ASABE S313.3. Este sistema requiere demasiado tiempo y esfuerzo cuando las parcelas a estudiar son grandes, ya que los muéstreos se realizan en puntos discretos de la parcela, por ello están siendo sustituidos por los medidores de resistencia al corte, que permiten la utilización de vehículos autopropulsados y la obtención de datos georeferenciados en continuo, durante el desplazamiento del dispositivo de medida.
Glancey et al. (1989) instrumentaron un chisel para medir en continuo la resistencia mecánica del suelo a diferentes profundidades. Para ello, introdujeron seis células de carga montadas directamente detrás de la cuchilla de corte y otras seis en la parte trasera del chisel a la misma profundidad que las primeras. Además se instaló un sensor para medir las fuerzas verticales que actuaban sobre el chisel.
Adamchuk et al (2001) diseñaron una cuchilla vertical lisa sobre la que situaron una serie de células de carga a diferentes profundidades en la parte posterior de la cuchilla. Una variación de este modelo fue la de Andrade et al. (2001) que diseñaron un sensor que medía la resistencia al corte del suelo consistente en ocho cuchillas de corte que se apoyaban en células de carga independientes. El sensor medía la resistencia a lo largo del perfil del suelo hasta una profundidad de 60 cm en incrementos de 7,5 cm.
Sirjacobs et al. (2002) desarrollaron y calibraron un sensor inspirado en el principio utilizado cuando se instrumentan los implementos de laboreo para determinar la tracción requerida. Estaba constituido por una fina cuchilla de 27 cm de largo, 4.5 de ancho y un ángulo de 10º respecto a la vertical, que se mueve horizontalmente por el suelo a velocidad y profundidad constante y sobre la que el empuje del suelo genera fuerzas horizontales y verticales. El brazo que soporta la cuchilla está unido a la zona sensitiva que es un dinamómetro octogonal, fijado fuera del suelo, justo antes del tractor. Las células de carga miden las fuerzas sobre la cuchilla que produce una capa de 30 cm de espesor de suelo y el momento generado en extremo superior del brazo que la soporta.
Mouazen et al. (2003) se basaron en un sistema similar al anterior para medir en tiempo real la fuerza de tiro, a 15 cm de la superficie del suelo, con un subsolador que actuaba de sensor de compactación. Estaba compuesto de un chisel de 0.06 m de ancho y una cuchilla de 0.03 de ancho y una célula de carga extensométrica octagonal. Previamente determinaron que los ángulos de 15º para el chisel y de 75º para la cuchilla eran los que proporcionaban los mejores valores de tiro (Mouazen et al., 1999) para la aplicación del modelo teórico de elementos finitos con el que relacionar el tiro (variable dependiente)con la humedad y densidad del suelo y la profundidad de las medidas y así obtener mapas de compactación del suelo.
Christenson et al. (2004) diseñaron un sensor compuesto de filos cortantes con forma de prismas triangulares de 45º. Los prismas transfieren las fuerzas del estrato de suelo, correspondiente a su longitud, a tres puntos discretos de la cuchilla que los soporta. En cada uno de estos puntos se sitúa una célula de carga que mide la resistencia mecánica, de forma que se puede obtener la ecuación polinómica de segundo orden que representa su variación para el perfil completo del suelo. Los prismas o filos cortantes son diseñados de forma que su grosor disminuya con la profundidad (para aumentar la sensibilidad en las capas superficiales, con menor resistencia mecánica) y sea superior al de la cuchilla (para reducir los efectos de la fricción del suelo sobre ella).
Chung et al. (2004) diseñaron un sensor similar al anterior pero sustituyeron los filos cortantes por puntas prismáticas. El sistema de medida de la resistencia horizontal a la penetración del suelo se basaba en una cuchilla principal sobre la que se sitúan cinco puntas prismáticas a diferentes profundidades. La cuchilla de 86 cm de longitud, 18 cm de anchura y 1,91 cm de grosor, tiene una cubierta de chapa de acero inoxidable de 0.63 cm de grosor. Al introducirse en el suelo y avanzar la presión de éste sobre la superficie de las puntas es transmitida a través de un vastago a la célula de carga correspondiente situada en el interior del cuerpo de la cuchilla. La cuchilla se monta en una estructura que a su vez se engancha en el tripuntal del tractor. Se optimizaron parámetros de diseño del sensor como la distancia óptima entre las puntas (10 cm) y la longitud de los vástagos (5,1 cm) hasta el filo de la cuchilla, para distintas velocidades y profundidades de trabajo (Chung et al., 2003).
Sun et al. (2005) diseñaron un sensor de medida continua de resistencia al corte a través de un cono de penetración que incorporaba además un sensor de humedad. Operaba a una profundidad máxima de 20 cm. Consiste en un penetrómetro horizontal que mide la resistencia mecánica conforme el sensor avanza introducido en el suelo. Tiene un vástago, que une el cono de penetración de 20 mm de diámetro, con la cuchilla que mide 40 cm de largo y 5 cm de ancho. El diseño de ésta asegura que las medidas serán independientes de la profundidad y protege al resto de los elementos del impacto de las piedras. A su vez la cuchilla está unida a una palanca de fuerza que es la que actúa sobre la célula de carga que se encuentra en su parte superior, sin ser introducida en el suelo.
Este mismo año, Chukwu y Bowers (2005) diseñaron un sensor que medía a tres profundidades simultáneamente. Tiene tres puntas prismáticas con un ángulo de 30º que están en contacto directo con el suelo y que están unidas a las células de carga por un vástago, estando éstos elementos en el interior de una carcasa en forma de cuña de 30º. Las puntas se sitúan a una distancia de 10.2 cm entre ellas. Utilizaron un material de silicona para rellenar el hueco que quedaba en el interior de la carcasa y evitar que las partículas de suelo pudieran entrar en esta área y afectar las lecturas de las células.
Hall y Raper (2005) optimizan el diseño de un sensor de la resistencia horizontal a la penetración, cuya característica principal es que una vez introducido en el suelo el sensor se puede desplazar hacia arriba y hacia abajo lo que permite detectar rápidamente la profundidad de posibles suelas de labor. El sensor esta basado en un sistema patentado de medida (Raper and Hall, 2003) y consiste en una sola punta incrustada en una cuchilla de acero donde se encuentra el transductor de fuerza. Este diseño permite el desplazamiento de la cuchilla sobre la vertical a la vez que se avanza sin que se soporten fuerzas verticales adicionales. La longitud de la cuchilla es de 90 cm, lo que permite una profundidad efectiva de medida de 60 cm; una anchura de 15 cm; un grosor de 3,75 cm; el ángulo de corte es de 30º y para facilitar la entrada en el...
Reivindicaciones:
1. Sistema para la medida "in situ" de la resistencia al corte y la fuerza de fricción en suelos, determinando un equipo arrastrable por un vehículo autopropulsado, y comprendiendo un bastidor portador de una pluralidad de cuchillas delgadas con capacidad de medir a distintos niveles de profundidad, se caracteriza porque la unión de cada una de las cuchillas (4) y (5) al bastidor se realiza mediante parejas de barras verticales (9) situadas, cada pareja, a uno y otro lado de la correspondiente cuchilla (4) y (5), determinando dicha unión un sistema de cuadrilátero articulado que permite medir directamente, con una célula de carga asociada a cada cuchilla, la resultante de las fuerzas horizontales que actúan sobre cada una de ellas, y con ello conocer la resistencia total del suelo determinada por la suma de la resistencia de corte más la resistencia de fricción.
2. Sistema para la medida "in situ" de la resistencia al corte y la fuerza de fricción en suelos, según reivindicación 1, caracterizado porque incorpora una pluralidad de cuchillas de corte (4) situadas una detrás de otra, con su borde de ataque (12) biselado y en oblicuo, así como una o más cuchillas de fricción (5) situadas por detrás de la última cuchilla de corte (4), o intercaladas entre éstas, habiéndose previsto que cada una de las cuchillas de corte (4) presente una longitud superior a la inmediatamente situada por delante, mientras que la cuchilla de fricción (5), carente de borde biselado, presenta una longitud ligeramente inferior a la cuchilla de corte (4) situada inmediatamente por delante de ella.
3. Sistema para la medida "in situ" de la resistencia al corte y la fuerza de fricción en suelos, según reivindicaciones anteriores, caracterizado porque las barras verticales (9) del cuadrilátero articulado, presentan dos orificios, uno inferior (10) y otro superior (11), realizándose la articulación inferior a través de un bulón pasante y ajustado a los orificios (8) correspondientes a las placas laterales (1) que forman el bastidor, a las cuchillas (4) y (5) y las propias barras verticales (9) del cuadrilátero articulado, mientras que la articulación superior de dichas barras verticales (9) a las cuchillas (4) y (5), se realiza con una mayor holgura para asegurar la articulación del cuadrilátero.
4. Sistema para la medida "in situ" de la resistencia al corte y la fuerza de fricción en suelos, según reivindicaciones anteriores, caracterizado porque el borde superior de las cuchillas (4) y (5) está afectado de un escalón (13) para bloquear el movimiento en el sentido inverso de avance de las cuchillas (4) y (5), quedando el tramo inferior y horizontal enrasado con el borde superior de las placas (1) del bastidor, con la particularidad de que las respectivas células de carga apoyan sobre el tramo vertical de tales escalones, yendo fijadas tales células de carga a respectivos soportes (14) solidarizados a las propias placas laterales (1) del bastidor.
5. Sistema para la medida "in situ" de la resistencia al corte y la fuerza de fricción en suelos, según reivindicaciones anteriores, caracterizado porque las caras de la cuchilla o cuchillas de fricción (5) se encuentran en contacto con el suelo cortado por las cuchillas de corte (4) situadas por delante, de manera que el valor obtenido como resultado de dividir la fuerza medida en dicha cuchilla de fricción (5) entre su superficie de contacto, posibilita conocer la fuerza de fricción que actúa sobre cada cuchilla de corte (4), al multiplicar dicho valor por la superficie en contacto con el suelo de tales cuchillas de corte (4), mientras que la diferencia entre la fuerza total medida en las cuchillas de corte y dicha fuerza resultante de fricción, proporciona el valor de la resistencia al corte que ofrece el suelo al nivel de profundidad al que actúa cada cuchilla de corte (4).
Patentes similares o relacionadas:
 Conjunto y método para el marcado y corte de alambres, y una máquina que comprende dicho conjunto, del 31 de Julio de 2019, de Cometo S.r.l: Conjunto para marcar y cortar alambres, que comprende
- primeros medios de corte ;
- segundos medios de corte enfrentados a los primeros […]
Conjunto y método para el marcado y corte de alambres, y una máquina que comprende dicho conjunto, del 31 de Julio de 2019, de Cometo S.r.l: Conjunto para marcar y cortar alambres, que comprende
- primeros medios de corte ;
- segundos medios de corte enfrentados a los primeros […]
EQUIPO CIZALLADOR DE TUERCAS, del 2 de Febrero de 2017, de ABASOLO VALLEJO S.A: Un equipo cizallador de tuercas que encajan en pernos , en donde dicha cada tuerca tiene una entalla en a lo menos dos de sus caras […]
DISPOSITIVO Y PROCEDIDMEINTO PARA LA FABRICACION DE PLACAS., del 16 de Abril de 2005, de SCHULER AUTOMATION GMBH & CO. KG: Dispositivo para la fabricación de placas con una prensa hidráulica, en el que entre una mesa (4a) y una varilla que se encuentra […]
CONJUNTO OSCILANTE PARA HACER PIVOTAR UNA MATRIZ DE CORTE., del 1 de Agosto de 2003, de COSMA INTERNATIONAL INC.: Un conjunto oscilante para hacer pivotar una matriz de corte que está construida y configurada para cortas piezas a partir de material de plancha, comprendiendo […]
DISPOSITIVO DE CORTE SIMULTANEO DE DOS CHAPAS., del 1 de Noviembre de 1995, de SOLLAC: LA INVENCION SE REFIERE A UN DISPOSITIVO DE CORTE SIMULTANEO DE DOS CHAPAS QUE COMPRENDE, PARA CADA CHAPA, UN CONJUNTO FORMADO, POR UNA PARTE, POR UN ORGANO DE […]
TIJERA PARA EL DISGREGADO DE RECORTADURAS METALICAS., del 1 de Octubre de 1995, de THYSSEN INDUSTRIE AG: SE DESCRIBE UNA TIJERA PARA PROCESO DE DISGREGADO DE RECORTADURAS METALICAS CON UN SOPORTE DE TIJERA, EN DONDE UN CARRO DE CUCHILLA ES DESPLAZABLE DE FORMA […]
PORTACUCHILLAS EN CARROS DE CUCHILLAS DE UNA CIZALLA PARA CHATARRA., del 1 de Marzo de 1994, de THYSSEN INDUSTRIE AG: EN PORTACUCHILLAS EN EL CARRO DE CUCHILLAS DE CIZALLAS PARA CHATARRA SE DISPONEN CASQUILLOS CONCENTRICOS A LOS TORNILLOS DE FIJACION DE LAS CUCHILLAS PARA […]
MAQUINA CIZALLA-PUNZONADORA, del 1 de Febrero de 2007, de MAQUINARIA GEKA, S.A.: 1. Máquina cizalla-punzonadora, que integrando una estación de plegado a las otras estaciones de trabajo habituales de una cizalla-punzonadora, se caracteriza porque la activación […]