SISTEMA INTELIGENTE PARA EL CONTROL Y GESTIÓN DE UN VEHÍCULO MOTORIZADO PARA LA RECOGIDA DE CONTENEDORES DE RESIDUOS.
Sistema inteligente para el control y gestión de un vehículo motorizado para la recogida de contenedores de residuos,
siendo dicho vehículo motorizado (1) del tipo que comprende un brazo grúa (2) articulado para la manipulación del contenedor y una caja de carga (4), que comprende una pluralidad de sensores ubicados en el chasis del vehículo motorizado, el brazo grúa (2) y la caja de carga (4), cuya información procedente de los sensores es recogida por una respectiva unidad base de control asociada a cada sensor y es enviada a una unidad central de procesado (CPU) (18) para el procesamiento de datos, interpretando y ejecutando las instrucciones provistas en un programa de funcionamiento. De este modo, se obtiene un sistema capaz de ser programado para controlar procesos secuenciales en tiempo real de la recogida de contenedores.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201130146.
B65F3/04TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65F RECOGIDA O RETIRADA DE BASURAS DOMESTICAS O DESPERDICIOS SIMILARES (desinfección de basuras A61L; desintegrado de basuras B02C; clasificación de basuras B03B, B07B; vehículos a mano para el transporte de recipientes de basuras B62B; soportes de sacos B65B 67/00; transformación de basuras en fertilizantes C05F; transformación de basuras en combustibles sólidos C10L; colectores, pozos E03F; disposiciones en los edificios para evacuar las basuras E04F 17/10; hornos de incineración de basuras F23G). › B65F 3/00 Vehículos especialmente adaptados para la recogida de basuras (vehículos en general B60; equipo o accionamiento auxiliar de vehículos B60K; descarga del contenido por basculado del vehículo completo B65G; aparatos sobre ruedas para vaciar los colectores o los pozos E03F 7/10). › Uniones, brazos giratorios o soportes giratorios para elevar o bascular después los receptáculos.
G05B19/05FISICA. › G05CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › Controladores lógicos programables, p. ej. que simulen las interconexiones lógicas de señales según diagramas en escalera o gráficos de funciones.
G05B19/414G05B 19/00 […] › Estructura del sistema de control, p. ej. controlador común o sistema multiprocesador, interfaz hacia el servocontrolador, controlador de interfaz programable.
Fragmento de la descripción:
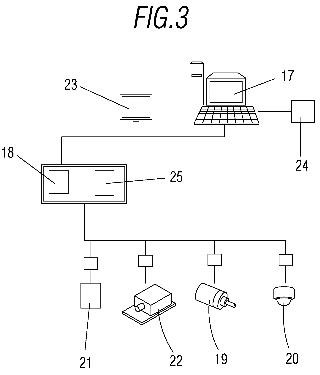
Sistema inteligente para el control y gestión de un vehículo motorizado para la recogida de contenedores de residuos. Objeto de la invención La presente solicitud de patente de invención tiene por objeto el registro de un sistema inteligente para el control y gestión de un vehículo motorizado para la recogida de contenedores de residuos que incorpora notables innovaciones y ventajas. Más concretamente, la invención propone el desarrollo de un sistema inteligente para el control y gestión de un vehículo motorizado destinado al campo de la recogida de residuos que permite controlar los diversos procesos en tiempo real, siendo adecuado tanto para la gestión de contenedores de superficie como contenedores alojados bajo el nivel del suelo y a un vehículo motorizado para la recogida de contenedores de residuos que presenta el sistema inteligente de acuerdo con la reivindicación 1. Antecedentes de la invención Es bien sabido la automatización cada día mayor de los vehículos destinados a la recogida de contenedores de residuos en las vías urbanas con la finalidad de facilitar y reducir el tiempo necesario para llevar a cabo las operaciones de recogida y manipulación de los contenedores. Estos vehículos con automatismos permiten al operario actuar de forma automática sobre cada uno de los dispositivos o mecanismos principales del vehículo, pero actuando sobre cada uno de ellos de forma independiente y sin estar interrelacionados o coordinados, por lo que cada etapa debe ser seleccionada, gestionada y controlada por el operario por lo que se incrementa el tiempo de manipulación por cada contenedor y existe una amplia posibilidad de error por parte del operario en la selección del tipo de operación a seleccionar según las necesidades. Por lo tanto, existe la necesidad de obtener un sistema inteligente que permita interactuar en tiempo real los dispositivos principales que intervienen en la recogida y manipulación de contenedores con la consiguiente ventaja de simplificar y reducir aún más el tiempo de operación de recogida de contenedores. Además, el solicitante no tiene conocimiento en la actualidad de una invención que disponga de las características que se describen en esta memoria. Descripción de la invención La presente invención se ha desarrollado con el fin de proporcionar un sistema que resuelva los inconvenientes anteriormente mencionados, aportando, además, otras ventajas adicionales que serán evidentes a partir de la descripción que se acompaña a continuación. Es por lo tanto un objeto de la presente invención proporcionar un sistema inteligente para el control y gestión de un vehículo motorizado para la recogida de contenedores de residuos, siendo dicho vehículo motorizado del tipo que comprende un brazo grúa articulado para la manipulación del contenedor a recoger, un equipo de compactación y una caja de carga que puede ser cerrada o superiormente abierta. En particular, el sistema inteligente se caracteriza por el hecho de que comprende una pluralidad de sensores ubicados en el chasis del vehículo motorizado, el brazo grúa, opcionalmente un equipo de compactación y la caja de carga, cuya información procedente de los sensores es recogida por una respectiva unidad base de control asociada a cada sensor y es enviada a una unidad central de procesado (CPU) para el procesamiento de datos, interpretando y ejecutando las instrucciones provistas en un programa de funcionamiento, una base de datos almacenada en un ordenador PC, y un módulo externo de comunicaciones vinculado a la CPU, de tal modo que lleva a cabo el control y ejecución en tiempo real de los procesos secuenciales durante la recogida, descarga y liberación de un contenedor por medio del brazo grúa, el equipo de compactación y la caja de carga. Este sistema tiene como objetivo universalizar el concepto de recogida, manipulación (con la optimización de la geometría y velocidad), gestión y control de residuos en función de la disponibilidad de maquinaria nueva o en uso, para que de esta forma se pueda obtener un conjunto que actúe de forma inteligente y automática sin estar sujeto a directrices concretas de fabricantes de equipos o de componentes específicos. Es otro objetivo de la presente invención proporcionar un sistema capaz de ser programado para controlar procesos secuenciales en tiempo real, propios de los equipos instalados, interactuando con el entorno físico al alcance de su radio de acción, ahorrando una gran cantidad de tiempo de los servicios de limpieza ya que se facilita la manipulación de los contenedores durante la recogida de residuos. Las respectivas unidades base de control y la unidad central de procesado son del tipo PLC. Para que el PLC cumpla con la función de controlar, es necesario programarlo con la información a cerca de los procesos a secuenciar. Esta información es recibida por los sensores anteriormente citados que, gracias al programa lógico interno, logran 2 ES 2 361 363 A1 implementarla a través de los accionadores que están previstos en el sistema, es decir, los mecanismos que forman parte del brazo grúa, el equipo de compactación y la caja de carga. Una ventaja que tiene el hecho de disponer de un PLC en el sistema descrito es el ahorro de tiempo ya que permite realizar modificaciones en el sistema sin costes adicionales dado que basta con modificar la programación de éste. Es otro objeto de la invención proporcionar un vehículo motorizado para la recogida de contenedores de residuos que tiene un chasis sobre el que se dispone una caja de carga y un brazo grúa para la manipulación de tales contenedores que comprende un sistema inteligente de control y gestión como el descrito con anterioridad. Adicionalmente, el vehículo puede incluir un equipo de compactación provisto de sensores que transmiten la información a una unida de control secundaria conectada con la unidad central de procesado. Otras características y ventajas del sistema objeto de la presente invención resultarán evidentes a partir de la descripción de una realización preferida, pero no exclusiva, que se ilustra a modo de ejemplo no limitativo en los dibujos que se acompañan, en los cuales: Breve descripción de los dibujos Figura 1.- Es una vista en alzado lateral de un vehículo motorizado de carga lateral de contenedores provisto del sistema inteligente de acuerdo con la invención; y Figura 2.- Es una vista en perspectiva de una realización de un brazo grúa a ser montado en el vehículo motorizado; Figura 3.- Es un vista esquematizada de un sistema inteligente de control y gestión de acuerdo con la presente invención. Descripción de una realización preferente Tal como se muestra en una realización de la invención, está previsto un sistema inteligente para el control y gestión de un vehículo motorizado para la recogida de contenedores de residuos, siendo dicho vehículo motorizado (1) del tipo que comprende principalmente un brazo grúa (2) articulado para la manipulación del contenedor, un equipo de compactación (3) y una caja de carga (4) de tipo conocido, motivo por el cual no se va a entrar en mayor detalle en su explicación. Haciendo particular referencia al brazo grúa anterior (2) y de acuerdo con la figura 2, consiste en un tipo de brazo grúa (2) que está comercialmente disponible en el mercado, estando básicamente compuesto por los siguientes elementos: - una base grúa (5); - un elemento giratorio (6) situado sobre la base grúa (5); - una columna giratoria (7); - un cilindro de elevación (8); - un brazo de elevación (9); - un cilindro de articulación (10); - un brazo de articulación (11); - extensiones hidráulicas (12) del brazo de articulación (11); - un basculante adaptador (13) para el elemento de agarre de contenedores; - un cabezal rotativo (14) ubicado en el extremo del brazo de articulación que permite el giro del elemento de agarre de para los contenedores; - un emisor radio mando (15); y - estabilizadores (16). Mencionar que el equipo de compactación (3) puede ser del tipo estacionario, es decir, montado y sujeto al chasis del vehículo motorizado o bien de tipo dinámico, es decir, que se puede cargar y descargar a voluntad del chasis mediante un equipo hidráulico predeterminado. 3 ES 2 361 363 A1 Dicho sistema inteligente se proporciona con una pluralidad de detectores que están ubicados en el brazo grúa (2), el equipo de compactación (3) y la caja de carga (4), cuya información es enviada a una unidad base de control para el procesamiento la dicha información recibida, provista de una base de datos conectado a un ordenador PC (17), una CPU (unidad central de procesado) (18), un módulo externo de comunicaciones (25), de tal modo que ejecuta el control y gestión en tiempo real de los procesos secuenciales durante la recogida, descarga y liberación de un contenedor del brazo grúa, el equipo de compactación y la caja de...
Reivindicaciones:
1. Sistema inteligente para el control y gestión de un vehículo motorizado para la recogida de contenedores de residuos, siendo dicho vehículo motorizado (1) del tipo que comprende un brazo grúa (2) articulado para la manipulación del contenedor y una caja de carga (4), caracterizado por el hecho de que comprende una pluralidad de sensores ubicados en el chasis del vehículo motorizado, el brazo grúa (2) y la caja de carga (4), cuya información procedente de los sensores es recogida por una respectiva unidad base de control asociada a cada sensor y es enviada a una unidad central de procesado (CPU) (18) para el procesamiento de datos, interpretando y ejecutando las instrucciones provistas en un programa de funcionamiento, una base de datos almacenada en un ordenador PC (17), y un módulo externo de comunicaciones vinculado a la unidad central de procesado (18), de tal modo que lleva a cabo el control y ejecución en tiempo real de los procesos secuenciales durante la recogida, descarga y liberación de un contenedor por medio del brazo grúa (2) y la caja de carga (4). 2. Sistema inteligente según la reivindicación 1, caracterizado por el hecho de que las respectivas unidades base y la unidad central de procesado son del tipo PLC (controlador lógico programable). 3. Sistema inteligente según la reivindicación 1, caracterizado por el hecho de que comprende un sensor de ángulo acoplable en el brazo de grúa, tal que transmite la información de posicionamiento, elevación y articulación de las partes articuladas del brazo grúa (2) a la unidad base de control. 4. Sistema inteligente según la reivindicación 1, caracterizado por el hecho de que comprende un sensor de giro (19) vinculable al brazo grúa (2) que transmite la información de posicionamiento del giro del brazo grúa (2) a la unidad base de control. 5. Sistema inteligente según la reivindicación 1, caracterizado por el hecho de que la caja de carga del vehículo incluye una pluralidad de cámaras (20) cuya información es transmitida visualmente al operador mediante una pantalla de visualización ubicada en la cabina del vehículo motorizado (1), y en el que la información es transmitida mediante comunicación Wifi. 6. Sistema inteligente según la reivindicación 1, caracterizado por el hecho de que comprende al menos dos sensores de desplazamiento sin contacto por láser (21), ubicados uno a cada lateral del vehículo motorizado para determinar la posición del contenedor a ser recogido. 7. Sistema inteligente según la reivindicación 1, caracterizado por el hecho de que incluye un módulo GPS (24) conectado en un puerto del ordenador PC (17) para la localización del vehículo motorizado en tiempo real. 8. Sistema inteligente según la reivindicación 1, caracterizado por el hecho de que incluye un inclinómetro (22) en los ejes de coordenadas X, Y para proporcionar información de las coordenadas de inclinación del plano del chasis del vehículo motorizado (1). 9. Sistema inteligente según la reivindicación 1, caracterizado por el hecho de que se proporciona un sensor de giro vinculado al cabezal rotativo (14) que permite transmitir la información de posicionamiento del giro de dicho cabezal rotativo (14). 10. Vehículo motorizado (1) para la recogida de contenedores de residuos que tiene un chasis sobre el que se dispone una caja de carga y un brazo grúa (2) para la manipulación de tales contenedores, caracterizado por el hecho de que comprende un sistema inteligente de control y gestión según cualquiera de las reivindicaciones 1 a 9. 11. Vehículo motorizado para la recogida de contenedores de residuos según la reivindicación 10, caracterizado por el hecho de que incluye un equipo de compactación provisto de sensores que transmiten la información a una unidad de control secundaria conectada con la unidad central de procesado. 6 ES 2 361 363 A1 7 ES 2 361 363 A1 8 ES 2 361 363 A1 9 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA
Patentes similares o relacionadas:
Dispositivo y método para la transmisión de datos, del 10 de Junio de 2020, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo para la transmisión de datos con una interfaz de aparato de medición , una interfaz de control y una interfaz adicional […]
Sistema de extensión de la red PLC, del 22 de Abril de 2020, de LSIS Co., Ltd: Un sistema de extensión de red de PLC, Controlador Lógico Programable, que incluye una base básica y una pluralidad de bases de extensión (200-1, 200-2,..., […]
Controlador lógico programable, del 22 de Abril de 2020, de LSIS Co., Ltd: Un controlador lógico programable, PLC, que tiene una pluralidad de módulos de comunicación, el PLC que comprende:
un módulo de control que se […]
Sistema PLC con servidor web y memoria particionada, del 22 de Enero de 2020, de LSIS Co., Ltd: Un sistema de controlador lógico programable (PLC) conectado a una tarjeta de memoria , que comprende:
un sistema de archivos configurado para dividir […]
Método para depurar un programa PLC, del 25 de Diciembre de 2019, de LSIS Co., Ltd: Un método para usar un microprocesador de propósito general para depurar un controlador lógico programable, PLC, el método comprende:
recibir en una unidad de procesamiento […]
Método de compilación óptima de un comando de PLC, del 27 de Noviembre de 2019, de LSIS Co., Ltd: Un método para compilar un comando de PLC, controlador lógico programable, el método que comprende: elegir un esquema de procesamiento de compilación de una pluralidad […]
Aparato para la gestión de programas de controlador lógico programable, del 27 de Noviembre de 2019, de LSIS Co., Ltd: Un aparato para la gestión de programas de PLC, controlador lógico programable, el aparato que comprende:
un medio de compilación configurado […]
Módulo de entrada analógica HART con una etapa de entrada diferencial, del 13 de Noviembre de 2019, de LSIS Co., Ltd: Transductor remoto direccionable de alta velocidad, módulo de entrada analógica HART con una etapa de entrada diferencial, el módulo […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .