SISTEMA DETECTOR DE APROXIMACION.
Sistema detector de aproximación que comprende una unidad (14) del objeto móvil (14) y al menos una unidad (15) de operario,
las cuales incluyen una unidad de receptora de un sistema de posicionamiento por satélite y una unidad de transmisión-recepción vía radio respectivamente; caracterizado porque la unidad (14) del objeto móvil puede recibir, por medio de la unidad de transmisión-recepción vía radio, un mensaje de alerta de situación de peligro para un operario (13) emitida desde la unidad (15) de operario a través de la unidad de transmisión-recepción vía radio, y en respuesta al mensaje de alerta una unidad de aviso suministra una señal de aviso al conductor del objeto móvil (11, 12) indicativa de la probabilidad de riesgo de atropello detectado por la unidad (15) de operario.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200931098.
Solicitante: SACYR VALLEHERMOSO, S.A.
Nacionalidad solicitante: España.
Inventor/es: GARCIA SANTIAGO,JACINTO LUIS, POUS DE LA FLOR,JUAN, PARIS RODRIGUEZ,MIGUEL, CERROLAZA CALLEJA,Fernando, MONTOYA MIÑANO,Juan Jose, SANCHEZ ALLENDE,Jesus.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G08B21/02 FISICA. › G08 SEÑALIZACION. › G08B SISTEMAS DE SEÑALIZACION O DE LLAMADA; TRANSMISORES TELEGRAFICOS DE ORDENES; SISTEMAS DE ALARMA. › G08B 21/00 Alarmas que reaccionan a una sola condición especificada, indeseable o anormal, y no previstas en otro lugar. › Alarmas para garantizar la seguridad de las personas.
- G08G1/123 G08 […] › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › que indican la posición de vehículos, p. ej. vehículos de horario determinado.
- G08G1/16 G08G 1/00 […] › Sistemas anticolisión.
Fragmento de la descripción:
Sistema detector de aproximación.
Campo de la invención
La presente invención se refiere a un sistema detector de aproximación entre personas a pie y maquinaria en movimiento.
Estado de la técnica
En general, las operaciones de compactado en obra de carretera llevan asociada la presencia en un entorno físico relativamente reducido de operarios a pie y maquinaria en movimiento, lo que implícitamente conlleva un riesgo de atropello hacia el personal situado en las inmediaciones de los diferentes tipos de vehículos utilizados en las labores de compactación de viales.
Se ha observado que los medios utilizados para garantizar la seguridad de los operarios presentes a pie de obra de compactado de viales frente a atropellos accidentales causados por los vehículos especiales que trabajan en operaciones de compactado pueden considerarse insuficientes ya que, de hecho, las cifras de siniestralidad por las razones expuestas clasifican las operaciones de compactado de viales como de alto riesgo frente a atropellos y/o daños por alcance de los operarios a pie.
Los medios utilizados para reducir la siniestralidad son simples en su planteamiento e incluyen un zumbador acústico de marcha atrás instalado en la máquina y la utilización de chalecos reflectantes en los operarios a pie para facilitar su identificación por parte del conductor de un vehículo de compactado.
La rutina laboral a la que se ven sometidos los operarios, constantemente apercibidos del sonido del zumbador, hace que disminuya el efecto preventivo, eliminando la sensación de alerta que podría representar para un operario recién incorporado al entorno físico de trabajo.
Si a este factor se añade el hecho de trabajar en un entorno de trabajo con un nivel sonoro alto, propio del sector de la construcción y las obras públicas, condiciones ambientales especialmente agresivas derivadas en general del trabajo a la intemperie y, en particular, a las altas temperaturas de extendido del aglomerado, 150ºC; se puede derivar que la alerta acústica de la máquina ofrece un margen de protección reducido frente a los riesgos que se pretenden evitar, garantizar la seguridad de los operarios presentes a pie de obra frente a atropellos y/o accidentes de trabajadores por alcances de los vehículos y/o maquinaria utilizada durante la ejecución de obras de construcción, carreteras, etc..
Descripción de la invención
La presente invención busca resolver o reducir uno o más de los inconvenientes expuestos anteriormente por medio de un sistema detector de aproximación como es definido en las reivindicaciones.
En una realización el sistema detector de aproximación comprende una unidad de objeto móvil de obra y al menos una unidad de operario, las cuales incluyen una unidad de receptora de un sistema de posicionamiento por satélite y una unidad de transmisión-recepción vía radio respectivamente.
La unidad de objeto móvil de obra de construcción calcula su posición sobre la base de la información suministrada por la correspondiente unidad receptora del sistema de posicionamiento por satélite que incorpora.
La posición obtenida es transmitida, en modo difusión, mediante la unidad de transmisión-recepción vía radio a la unidad de operario que la recibe a través de la correspondiente unidad de transmisión-recepción para suministrarla a una unidad de procesamiento, incluida en la unidad de operario.
La unidad de procesamiento recibe también datos de posicionamiento del individuo, a partir de la correspondiente unidad de receptora del sistema de posicionamiento por satélite incluida en la unidad de operario; que junto con los datos de posicionamiento recibidos y un conjunto de directivas almacenadas por el procesador calcula la distancia existente entre máquina móvil y operario.
En el caso de que el valor de la distancia calculada sea inferior a un umbral de distancia de riesgo determinado, la dirección y velocidad de la máquina de obra exponga al operario a un potencial riesgo de atropello, la unidad de procesamiento suministra un mensaje de respuesta a una unidad de aviso que suministra una señal de alarma del tipo vibración perceptible por el operario que porta la unidad de aviso sobre el mismo, por ejemplo, sobre su tórax, en el dorso de una mano, etc., de forma que el operario pueda reaccionar con tiempo suficiente para retirarse de la trayectoria de atropello o alcance.
Asimismo, el mensaje de respuesta es emitido hacia la unidad móvil para que suministre una señal de aviso adaptada al entorno donde se encuentra el conductor de la máquina, para que pueda ser perceptible por el operario conductor de la máquina móvil, de forma que pueda aminorar la velocidad y/o parar la misma y/o variar la trayectoria de marcha alejándose del operario.
Del antedicho modo de realización del sistema se deriva que la determinación de la posición de operarios y máquinas de obra es automática, la transmisión de datos de posición entre vehículo y operarios es bidireccional y la detección de situaciones de riesgo para los operarios es automática y el aviso suministrado al operario y al operario conductor está adaptada al entorno de trabajo de los mismos.
Descripción de las figuras
Ahora serán descritos los dispositivos que materializan la invención, a modo de ejemplo solamente, con referencia a los dibujos adjuntos, en el que:
la figura 1 muestra esquemáticamente una realización de un sistema de detección de aproximación, y
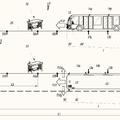
la figura 2 muestra en un diagrama de secuencia el modo de funcionamiento de una unidad de objeto móvil, en el caso en que se detecte una posible situación de atropello.
Modos de realización de la invención
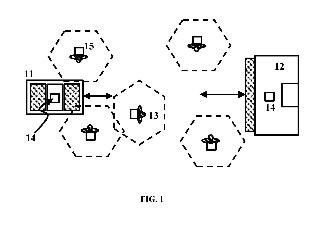
A continuación, con referencia a la figura 1 que ilustrada un sistema detector de aproximación entre un individuo y un objeto móvil.
El sistema comprende una unidad de operario 13 y una unidad de objeto 11, 12 móvil donde la unidad 15 de operario 13 y la unidad 14 de objeto 11, 12 móvil incluyen medios de localización y navegación basados en un sistema de posicionamiento por satélite tal como el sistema de posicionamiento global GPS, sistema Galileo, etc..
En una situación normal de trabajo en una obra de construcción, es frecuente que individuos u operarios 13 y objetos 11, 12 móviles o maquinaria móvil se encuentre próximos unos a otros a lo largo de una jornada laboral.
Por lo tanto, un requisito necesario pero no suficiente para detectar una situación potencial de riesgo para un operario 13 a pie es determinar, con el menor error posible, la situación relativa del operario 13 con respecto a cualquier máquina 11, 12 que se desplaza.
Consecuentemente, para incrementar la precisión de las mediciones del sistema GPS, la unidad 15 de operario y la unidad 14 del móvil incluyen medios de posicionamiento del tipo GPS diferencial, receptores GPS conocidos en el estado de la técnica.
La unidad 15 de operario y la unidad 14 del móvil comprende también determinación de la posición de operarios y máquinas de obra es automática, la transmisión de datos de posición entre vehículo y operarios es bidireccional y la detección de situaciones de riesgo para los operarios es automática y el aviso suministrado al operario y al operario conductor está adaptada al entorno de trabajo de los mismos.
Descripción de las figuras
Ahora serán descritos los dispositivos que materializan la invención, a modo de ejemplo solamente, con referencia a los dibujos adjuntos, en el que:
la figura 1 muestra esquemáticamente una realización de un sistema de detección de aproximación, y
la figura 2 muestra en un diagrama de secuencia el modo de funcionamiento de una unidad de objeto móvil, en el caso en que se detecte una posible situación de atropello.
Modos de realización de la invención
A continuación, con referencia a la figura 1 que ilustrada un sistema detector de aproximación entre un individuo y un objeto móvil.
El sistema comprende una unidad de operario 15 y una unidad 14 de objeto móvil donde la unidad 15 de operario y la unidad 14 de objeto móvil incluyen medios de localización y navegación basados en un sistema de posicionamiento por satélite tal como el sistema de posicionamiento global GPS, sistema Galileo, etc..
En una situación normal...
Reivindicaciones:
1. Sistema detector de aproximación que comprende una unidad (14) del objeto móvil y al menos una unidad (15) de operario, las cuales incluyen una unidad de receptora de un sistema de posicionamiento por satélite y una unidad de transmisión-recepción vía radio respectivamente; caracterizado porque la unidad (14) del objeto móvil comprende una unidad de transmisión-recepción vía radio adaptada para recibir un mensaje de alerta de situación de peligro para un operario (13); la unidad (15) de operario comprende una unidad de transmisión-recepción vía radio adaptada para emitir el mensaje de alerta; y comprende también una unidad de aviso que en respuesta al mensaje de alerta está adaptada para suministrar una señal de aviso al conductor del objeto móvil (11, 12) indicativa de la probabilidad de riesgo de atropello detectado por la unidad (15) de operario.
2. Sistema de acuerdo a la reivindicación 1; caracterizado porque la unidad de aviso de la unidad (14) del objeto móvil suministra una señal de aviso del tipo sonora y/o luminosa adaptada a la localización de la unidad de aviso dentro del objeto móvil (11, 12).
3. Sistema de acuerdo a la reivindicación 1 o 2; caracterizado porque la unidad del objeto (14) móvil comprende la unidad de recepción de un sistema de posicionamiento por satélite que obtiene datos relativos a la localización, navegación, velocidad y rumbo del objeto móvil (11, 12) sobre la base de los datos recibidos desde un sistema de posicionamiento por satélite.
4. Sistema de acuerdo a la reivindicación 3; caracterizado porque la unidad de recepción de un sistema de posicionamiento por satélite incluye medios de posicionamiento del tipo sistema de posicionamiento global por satélite GPS diferencial.
5. Sistema de acuerdo a la reivindicación 3; caracterizado porque la unidad de transmisión-recepción de la unidad (14) del objeto móvil transmite en difusión hacia la unidad (15) de operario mediante un protocolo de comunicaciones los datos obtenidos de localización, navegación, velocidad y rumbo del objeto móvil (11, 12).
6. Sistema de acuerdo a la reivindicación 5; caracterizado porque la unidad de transmisión-recepción de la unidad del objeto móvil (11, 12) transmite en difusión hacia la unidad (15) de operario mediante un protocolo de comunicaciones inalámbrico bidireccional del tipo ZigBee.
7. Sistema de acuerdo a la reivindicación 1; caracterizado porque la unidad del operario (15) comprende la unidad de recepción de un sistema de posicionamiento por satélite que obtiene datos relativos a la localización del operario (13) sobre la base de los datos recibidos desde un sistema de posicionamiento por satélite.
8. Sistema de acuerdo a la reivindicación 7; caracterizado porque la unidad de recepción de un sistema de posicionamiento por satélite incluye medios de posicionamiento del tipo sistema de posicionamiento global por satélite GPS diferencial.
9. Sistema de acuerdo a la reivindicación 7 o 8; caracterizado porque la unidad (15) del operario comprende un dispositivo de transmisión-recepción vía radio que utilizan el protocolo de comunicaciones inalámbrico bidireccional
10. Sistema de acuerdo a la reivindicación 9; caracterizado porque la unidad (15) del operario comprende un dispositivo de transmisión-recepción vía radio que utilizan el protocolo de comunicaciones del tipo ZigBee.
11. Sistema de acuerdo a la reivindicación 10; caracterizado porque la unidad (15) de operario comprende una unidad de aviso que recibe los datos obtenidos de localización, navegación, velocidad y rumbo del objeto móvil (11, 12).
12. Sistema de acuerdo a la reivindicación 11; caracterizado porque la unidad (15) de operario comprende un medio de procesamiento de aplicación de datos que es conectable eléctricamente a la unidad de transmisión-recepción, al receptor GPS y a una unidad de aviso.
13. Sistema de acuerdo a la reivindicación 12; caracterizado porque la unidad de aviso de la unidad (15) de operario incluye un medio procesador de aplicación de datos que sobre la base de los datos de posicionamiento del operario (13), los datos de la unidad (14) del objeto móvil y un conjunto de directivas almacenadas en el procesador que son ejecutadas para calcular el posible riesgo de atropello de un operario (13).
14. Sistema de acuerdo a la reivindicación 13; caracterizado porque el procesador de aplicación define un área de seguridad y/o riesgo para el operario (13), función del valor de la distancia calculada a un objeto móvil (11, 12), de la velocidad del mismo y del sentido de marcha de la misma.
15. Sistema de acuerdo a la reivindicación 14; caracterizado porque el procesador de aplicación suministra un mensaje de respuesta a la unidad de aviso que genera una señal de alerta del tipo vibración perceptible por el operario (13) que porta la unidad de aviso, de forma que el operario pueda reaccionar con tiempo suficiente para retirarse de la trayectoria de atropello o alcance.
16. Sistema de acuerdo a la reivindicación 15; caracterizado porque la unidad de aviso genera una señal de vibración cuyas características de frecuencia y amplitud del estímulo vibratorio de la señal generada son función de la zona corporal sobre la que se localiza el avisador.
17. Una unidad (14) de objeto móvil de acuerdo a cualquiera de las reivindicaciones 1 a 6.
18. Una unidad (15) de operario de acuerdo a cualquiera de las reivindicaciones 7 a 16.
19. Unidad (15) de operario de acuerdo a la reivindicación 18; caracterizado porque la unidad de aviso puede ser localizada sobre la piel del operario (13).
20. Unidad (15) de operario de acuerdo a la reivindicación 19; caracterizado porque la unidad de aviso puede ser localizada sobre el tórax, sobre una mano del operario (13), etc..
Patentes similares o relacionadas:
Dispositivo telemático a bordo de un vehículo, del 4 de Diciembre de 2019, de Ficosa International S.A: Un dispositivo de comunicación telemática para su instalación en un vehículo, que comprende: una carcasa ; medios de suministro de energía (101, […]
Sistema y método para determinar ubicación de parada de tránsito, del 27 de Noviembre de 2019, de MOOVIT APP GLOBAL LTD: Un método para determinar una ubicación de una parada de tránsito para un sistema de tránsito, comprendiendo el método: registrar una pluralidad […]
SISTEMA DE LLAMADA SEGURA A AUTOBUSES Y PROCEDIMIENTO PARA DICHO SISTEMA, del 17 de Septiembre de 2019, de LOPEZ FRANCISCO, Jose Ramon: Sistema de llamada segura a autobuses y procedimiento para dicho sistema, comprendiendo el sistema: - unos primeros lectores de solicitud de recogida, […]
 Sistema de control y método para vehículos de transporte de pasajeros, y vehículo de transporte de pasajeros configurado para el uso de tal sistema y/o de tal método, del 31 de Octubre de 2018, de IVECO FRANCE S.A.S: Sistema de control para vehículos de transporte de pasajeros, comprendiendo dicho sistema: - al menos una puerta (14a) asociada con una marca (15a) de referencia […]
Sistema de control y método para vehículos de transporte de pasajeros, y vehículo de transporte de pasajeros configurado para el uso de tal sistema y/o de tal método, del 31 de Octubre de 2018, de IVECO FRANCE S.A.S: Sistema de control para vehículos de transporte de pasajeros, comprendiendo dicho sistema: - al menos una puerta (14a) asociada con una marca (15a) de referencia […]
Procedimiento de seguimiento de entidades, del 4 de Abril de 2018, de THALES: Procedimiento de seguimiento de entidades que se mueven en un espacio supervisado representado por un primer modelo digitalizado que consta de un […]
Sistemas y procedimientos para el registro de emergencia de un dispositivo de acceso a red, del 28 de Marzo de 2018, de CONTINENTAL AUTOMOTIVE GMBH: Un procedimiento para el registro de emergencia de un dispositivo de acceso a red para vehículos, comprendiendo el procedimiento: supervisar uno o más […]
Dispositivo de transmisión de posición para vehículo, del 11 de Octubre de 2017, de HONDA MOTOR CO., LTD.: Un dispositivo de transmisión de posición adaptado para su instalación en un vehículo, que comprende: medio de detección de anomalías […]
Gestión de la asistencia y del transporte de al menos un usuario por un vehículo de una flota de vehículos, del 26 de Julio de 2017, de BISMUTH, HENRI: Sistema de gestión de la asistencia y del transporte de al menos un usuario por un vehículo de una flota de vehículos, estando el usuario […]