SISTEMA DE VISION TRIDIMENSIONAL.
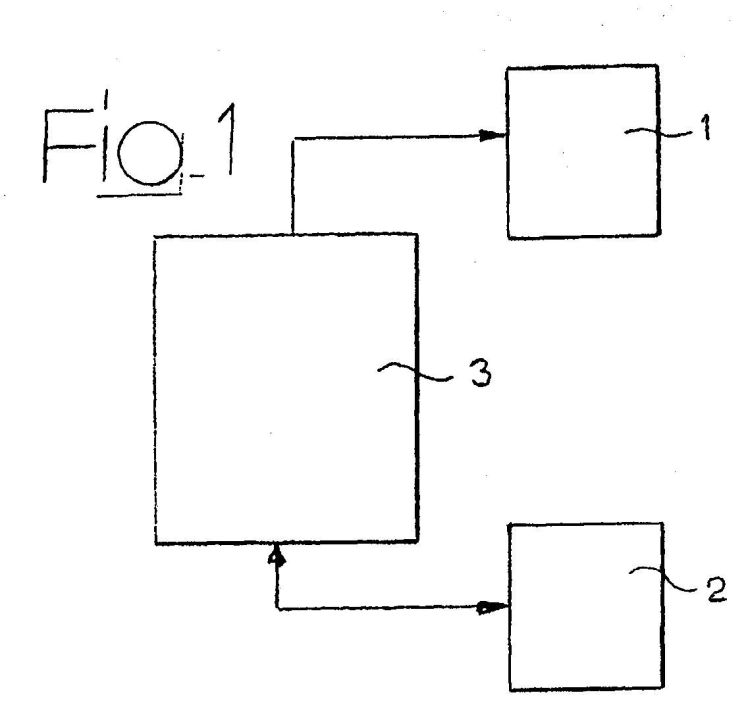
Sistema de visión tridimensional, que comprende: - un módulo de transmisión (1),
que incluye una fuente de radiación, estando constituido el módulo de transmisión por una fuente pulsada que ilumina un escenario para registrarlo en tres dimensiones, la cual, para cada grabación tridimensional, emite Q = m x k impulsos de duración deltat, con una frecuencia de repetición igual a f = dc/deltat, siendo dc el ciclo de trabajo de la señal de fuente pulsada; - un módulo receptor (2), que comprende por lo menos un elemento fotosensible, que puede funcionar en la misma ventana espectral que dicha fuente de radiación, estando adaptado dicho módulo receptor para recibir radiación de dicha fuente de radiación y reflejada de un objeto situado dentro de dicho escenario; y - unos medios electrónicos de control y procesamiento (3) asociados con dicho módulo receptor; comprendiendo dichos medios electrónicos de control y procesamiento unos medios de procesamiento-sincronización capaces de efectuar, para cada secuencia, una operación de integración de los impulsos de eco m asociados con dicha secuencia k, utilizándose dicha operación de integración para acumular un número de electrones (nj) a través de m ventanas de integración, presentando cada una de dichas ventanas de integración una duración deltatf y una frecuencia de repetición f, y siendo la diferencia de fase entre la primera ventana y la primera secuencia de ventanas de integración y el borde ascendente del primer impulso transmitido igual a tau; caracterizado porque cada una de dichas secuencias k de ventanas de integración se encuentra temporalmente fuera de fase respecto a la secuencia anterior de ventanas de integración durante un intervalo de tiempo igual a la duración del impulso deltat, siendo dicho tiempo de duración deltatf igual al deltat, siendo dicha duración del impulso deltat un número entero submúltiplo de un tiempo de vuelo máximo (T0); y porque dichos medios de control y procesamiento (3) comprenden además unos medios adaptados para calcular la distancia cubierta por dicha radiación mediante las etapas siguientes: #a) identificar, entre dichas secuencias k de ventanas de integración, unas primera y segunda secuencias consecutivas de ventanas de integración recibidas en un mismo elemento fotosensible en el cual se encuentra integrado el impulso de eco, y# b) realizar un cálculo que contiene una relación del número (ni; ni+1) de electrones acumulados en dichas ventanas correspondiente a dichas primera y segunda secuencias consecutivas de ventanas de integración para determinar el borde ascendente de dicho impulso de eco respecto a dichas secuencias de ventanas de integración, y #c) extrapolar, basándose en la posición (i) de dicha primera secuencia de ventanas de integración identificada entre dichas secuencias k de ventanas de integración, el tiempo de vuelo del impulso, siendo dicho tiempo de vuelo igual a la distancia en tiempo entre el borde ascendente del impulso y el borde ascendente del impulso de eco recibido.
Tipo: Resumen de patente/invención.
Solicitante: C.R.F. SOCIET CONSORTILE PER AZIONI.
Nacionalidad solicitante: Italia.
Dirección: STRADA TORINO, 50,10043 ORBASSANO (TORINO).
Inventor/es: LIOTTI, LUCA, PERLO, PIERO, BORELLO, ELENA, REPETTO,PIER MARIO, DUGAND,MARIE MARGUERITE C.R.F. SOC. CONSORTILE, BALOCCO,ELENA.
Fecha de Publicación: .
Fecha Solicitud PCT: 19 de Marzo de 2003.
Fecha Concesión Europea: 25 de Abril de 2007.
Clasificación PCT:
- G01S17/10 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › que utilizan la transmisión de ondas discontinuas moduladas por pulsos (determinación de la distancia mediante mediciones de fase G01S 17/32).
- G01S17/89 G01S 17/00 […] › para la cartografía o la formación de imágenes.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Patentes similares o relacionadas:
MÉTODO Y DISPOSITIVO DE DETECCIÓN DE PICO DEL HISTOGRAMA COMPRIMIDO DE LOS VALORES DE PÍXEL EN SENSORES DE TIEMPO-DE-VUELO DE ALTA RESOLUCIÓN, del 12 de Marzo de 2020, de CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS: Se describe en este documento método para la detección del pico del histograma comprimido de los valores de píxel en sensores de tiempo-de-vuelo […]
Dispositivo para la determinación del nivel de llenado de tubos de monedas, del 6 de Noviembre de 2019, de Crane Payment Innovations Ltd: Dispositivo para la determinación del nivel de llenado de al menos un tubo de monedas que se puede llenar con monedas, que comprende al menos un emisor de rayos ópticos […]
Método para procesar pulsos de eco de un sensor láser 3d activo para proporcionar mediciones de distancia, del 24 de Julio de 2019, de HENSOLDT Sensors GmbH: Un método para procesar pulsos de eco de un sensor 3D activo para proporcionar mediciones de distancia del entorno frente al sensor, que comprende las siguientes […]
Lidar impulsado con amplificador óptico con semiconductor, del 27 de Junio de 2019, de Leosphere: Lidar impulsado que comprende: • un laser principal apto para generar un haz de laser principal (Fm), • un generador de impulsos […]
Concepto para la medición óptica de la distancia, del 19 de Junio de 2019, de VOLKSWAGEN AKTIENGESELLSCHAFT: Estructura de píxel para la medición óptica de la distancia con las siguientes características: un sustrato semiconductor; […]
Sistema de seguimiento dinámico y método de guiado automático basado en cámaras 3D de tiempo de vuelo, del 3 de Abril de 2019, de Terabee S.A.S: Un sistema [Fig. 1, ] de seguimiento dinámico que comprende: - una cámara [Fig. 1, ] tridimensional basada en tecnología de tiempo […]
Sensor mejorado de telémetro de láser, del 8 de Noviembre de 2017, de OSI Optoelectronics: Un sistema para determinar la forma tridimensional de un vehículo , comprendiendo el sistema: un sensor de distancia que comprende un transmisor de […]
Procedimiento de adquisición de las coordenadas de un punto de activación de un proyectil y sistema de dirección de tiro que pone en práctica tal procedimiento, del 17 de Mayo de 2017, de NEXTER SYSTEMS: Procedimiento de adquisición de las coordenadas de un punto de activación (P) de un proyectil o de una ráfaga de proyectiles en trayectoria y […]