SISTEMA DE TRACCIÓN PARA PLATAFORMAS MÓVILES.
Sistema de tracción para plataformas móviles (2, 3) que tiene una estructura portante (1),
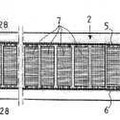
subsistemas de desplazamiento (4, 5, 10, 11) independientes que tienen una cadena tractora (4) para ser guiada entre guías de cadena (7) a lo largo de una trayectoria, un subsistema elevador (5) en la zona de embarque y un subsistema elevador (5'') en la zona de desembarque para desplazar plataformas móviles (2, 3), una pluralidad de motores lineales (10) para desplazar horizontalmente las plataformas móviles (2, 3), plataformas (2, 3) que tienen dispositivos de desplazamiento horizontal que tienen rodillos delanteros (61''), rodillos traseros (62'') dispositivos de arrastre que tienen una pluralidad de conectores (8) y un equipo de tracción (12, 13) para mover la cadena tractora (4) conforme a un movimiento discontinuo, punto a punto, reversible
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201031398.
Solicitante: THYSSENKRUPP ELEVATOR INNOVATION CENTER S.A.
Nacionalidad solicitante: España.
Provincia: ASTURIAS.
Inventor/es: GONZALEZ ALEMANY,MIGUEL ANGEL, GONZALEZ PANTIGA,JUAN DOMINGO, GONZALEZ FERNANDEZ,ENRIQUE, ROS ZUAZUA,PEDRO.
Fecha de Solicitud: 20 de Septiembre de 2010.
Fecha de Publicación: .
Fecha de Concesión: 29 de Noviembre de 2011.
Clasificación Internacional de Patentes:
- B66B21/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66B ASCENSORES; ESCALERAS O PASILLOS MECANICOS (dispositivos salvavidas utilizados como alternativa a los medios de salida normales, p. ej. escaleras, durante el rescate, para hacer descender a las personas de los edificios u otras estructuras análogas, en jaulas, bolsas, o soportes similares A62B 1/02; equipamiento para la manipulación de cargars o para facilitar el embarque de pasajeros o similar B64D 9/00; dispositivos de frenado o de parada caracterizados por su aplicación a los mecanismos de elevación o izado B66D 5/00). › Clases o tipos de escaleras o pasillos mecánicos.
- B66B23/14D
Clasificación PCT:
Fragmento de la descripción:
Sistema de tracción para plataformas móviles
Campo de la invención
La presente invención se refiere al sistema de tracción de plataformas móviles pertenecientes a un sistema de transporte universal y accesible de personas/mercancías.
Antecedentes de la invención
Dentro del campo de actuación de los sistemas universales de transporte para personas/mercancías se observan diferentes propuestas para el movimiento de las plataformas o cabinas de estos sistemas. Estos sistemas se caracterizan por un movimiento de plataformas en trayectorias rectilíneas punto a punto, como en los elevadores y ascensores inclinados, o cerradas y coplanarias como en los sistemas tipo carrusel. Se detecta la necesidad de dar solución al movimiento de plataformas en sistemas de transporte de personas y/o mercancías que tienen otro tipo de trayectoria y transiciones en diferentes direcciones y sentidos (horizontal, inclinado y vertical), así como movimientos discontinuos de las plataformas o cabinas. Los diferentes métodos de tracción existentes no satisfacen las necesidades de movimiento requeridas para todas las posibilidades de movimiento de plataformas. La presente invención aporta una solución al movimiento y control de plataformas para sistemas de transporte de personas y/o mercancías.
Descripción de la invención
La presente invención se refiere a un sistema universal y accesible para el trasporte de pasajeros/mercancías que comprende una serie de plataformas y más concretamente al subsistema tractor encargado del movimiento de las plataformas.
Para entender el objeto de la invención se debe estudiar en primer lugar el ciclo de funcionamiento de una de las plataformas del sistema, comenzando ésta en la posición de embarque de pasajeros, área en la que los pasajeros acceden a la plataforma situada en posición horizontal. Seguidamente comienza el recorrido de la plataforma por el camino de ida, que puede ser inclinado, donde la plataforma se desplaza paralela al suelo para garantizar la horizontalidad de la plataforma o cabina, y permitir un nivel de confort adecuado al pasajero. Cuando la plataforma llega a la zona de desembarque, la plataforma se mantiene en posición horizontal para que los pasajeros puedan abandonar la plataforma de manera confortable. Una vez realizado el desembarque de los pasajeros, la plataforma es desplazada horizontalmente hacia el área de elevación superior, donde un sistema elevador posiciona la plataforma para efectuar el camino de retorno. La plataforma realiza el camino de retorno con su suelo en posición paralela al plano inclinado para reducir la altura de la estructura del sistema en el tramo central (se entiende por tramo central el comprendido entre las zonas de embarque y desembarque).
Dicho camino de retorno consta de un tramo horizontal superior, un tramo inclinado y un tramo horizontal inferior. Tras llegar la plataforma a la zona inferior, la plataforma es desplazada al área de elevación inferior donde, mediante un sistema elevador, la plataforma es colocada en el camino útil o de ida y permitir el embarque de pasajeros. Se comenzaría de nuevo otro ciclo de desplazamiento de plataformas.
El ciclo de movimiento descrito anteriormente por las plataformas es llevado a cabo por dos sistemas tractores independientes, de acuerdo a la trayectoria que es realizada por la plataforma:
- Un primer subsistema tractor es necesario para conseguir una primera trayectoria en planos horizontales, en las zonas de embarque y desembarque, tanto en el nivel del camino de retorno como en el nivel del camino de transporte;
- Un segundo subsistema tractor es necesario para conseguir una segunda trayectoria en tramos inclinados, tanto en el nivel del camino de transporte como en el nivel del camino de retorno.
Los sistemas tractores independientes están sincronizados entre sí para permitir las transiciones de las plataformas en las diferentes trayectorias. Esta sincronización también debe permitir un movimiento simétrico de las plataformas que son desplazadas en el trayecto inclinado para conseguir una compensación de pesos y menor potencia necesaria en el sistema tractor formado por cadena de rodillos, es decir, en el momento en que la plataforma en embarque inicie su movimiento ascendente inclinado, la plataforma tras-desembarque inicie su movimiento descendente inclinado.
El primer subsistema comprende motores lineales como elemento tractor. El segundo subsistema tractor comprende sistemas de transmisión mecánicos de cadenas de rodillos.
La transición entre los subsistemas tractores se realiza mediante un sistema de guiado sobre el que ruedan unos rodillos colocados en la parte inferior exterior de las plataformas. Dicho sistema de guiado es continuo en los tramos horizontal e inclinado y es discontinuo en los sistemas de elevación para permitir el cambio de trayectoria de la plataforma desde el plano horizontal inferior al plano horizontal superior y viceversa, permitiendo un movimiento ascendente/descendente de la plataforma. Por tanto los sistemas de elevación llevan instaladas unas guías configuradas para permitir la transición de la plataforma desde las zonas horizontales hasta el propio sistema elevador. Este sistema de guías se apoya sobre unas sujeciones que a su vez están ancladas a la estructura portante del sistema, lo que le aporta la rigidez necesaria para soportar los esfuerzos a los que está sometido el sistema de guiado.
El subsistema encargado de proporcionar movimiento a la plataforma en las partes horizontales del sistema comprende un motor lineal o un conjunto de motores lineales situado en el extremo del elevador, el cual, actúa sobre una serie de placas magnéticas situadas en la parte inferior de la plataforma, cerrando el circuito magnético del motor lineal. Estos motores lineales están configurados para que las plataformas:
sean desplazadas horizontalmente hacia los elevadores:
desde el subsistema de tracción mecánica del tramo inclinado que viene del camino de retorno en la zona de embarque;
desde el subsistema de tracción mecánica del tramo inclinado que viene del camino útil o de transporte en la zona de desembarque;
sean desplazadas horizontalmente desde los elevadores:
hasta el subsistema de tracción mecánica del tramo inclinado que va al camino de transporte en la zona de embarque;
hasta el subsistema de tracción mecánica del tramo inclinado que va al camino de retorno en la zona de desembarque.
El subsistema que se encarga de proporcionar movimiento a la plataforma en el tramo inclinado comprende una variedad de elementos cuya parte principal de arrastre es una cadena de rodillos que rueda sobre una guía para controlar en todo momento su posición. A esta cadena de rodillos se conecta un elemento mecánico o gancho instalado en cada plataforma para permitir que la plataforma sea enganchada y arrastrada por la cadena de rodillos. La cadena de rodillos esta situada en ambos lados de la plataforma para permitir un tiro simétrico y esta cadena de rodillos se acciona mediante dos ruedas dentadas accionadas por un conjunto motor-reductor. Las dos ruedas dentadas están soportadas a la estructura por la parte exterior de las ruedas, para permitir el paso de la plataforma por la parte interior de las ruedas dentadas. Estas ruedas son soportadas por
Un aspecto de la invención se refiere a un sistema de tracción para plataformas móviles como el definido en el juego de reivindicaciones.
Breve descripción de los dibujos
A continuación se pasa a describir de manera muy breve una serie de dibujos que ayudan a comprender mejor la invención y su mejora y que se relacionan expresamente con una realización de dicha invención que se presenta como un ejemplo no limitativo de ésta.
La Figura 1 muestra una vista lateral del conjunto del sistema.
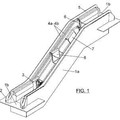
La figura 2 muestra una vista en perspectiva de la parte central del sistema.
La figura 3A muestra una vista en detalle del sistema elevación de la parte inferior del sistema y la figura 3B muestra una vista en detalle del movimiento horizontal de la parte inferior del sistema.
La figura 4A muestra una vista en planta y la 4B es un detalle de la figura 4A. La Figura 4C muestra una vista en detalle de la parte superior del sistema.
Descripción de realizaciones preferidas de la invención
Una...
Reivindicaciones:
1. Sistema de tracción para plataformas móviles (2, 3) caracterizado porque comprende:
subsistemas de desplazamiento (4, 5, 10, 11) independientes que comprenden:
en la zona de embarque:
en la zona de desembarque:
medios de rodadura (61', 62') que comprenden:
donde:
2. El sistema de tracción para plataformas móviles de la reivindicación 1 caracterizado por que:
3. El sistema de tracción para plataformas móviles de cualquiera de las reivindicaciones 1-2 caracterizado por que comprende dos cadenas tractoras (4), una en cada lateral de la estructura del sistema para arrastrar las plataformas (2, 3) de forma simétrica sin generar un par de giro en los rodillos (61', 62') de las plataformas (2, 3).
4. El sistema de tracción para plataformas móviles de cualquiera de las reivindicaciones 1-3 caracterizado por que los subsistemas de desplazamiento independientes (4, 5, 10) están sincronizados entre sí para permitir transiciones de las plataformas (2, 3) en las diferentes trayectorias y una compensación de pesos entre dos plataformas arrastradas por la cadena tractora (4), estando una plataforma en el camino de transporte y una plataforma en el camino de retorno.
Patentes similares o relacionadas:
Soporte para módulo de sistema de transporte para el desplazamiento de personas / mercancías, del 21 de Septiembre de 2018, de THYSSENKRUPP NORTE, S.A.: Un soporte para un módulo de un sistema de transporte para el desplazamiento de personas y / o mercancías que comprende una pluralidad de placas en el que […]
Sistema de arrastre para plataformas móviles, del 16 de Noviembre de 2016, de THYSSENKRUPP ELEVATOR INNOVATION CENTER S.A: Un sistema de arrastre para plataformas móviles que comprende: 1a) una estructura portante: 1a1) que comprende una pluralidad de fijaciones […]
 Dispositivo de absorción de choques para transportadores de pasajeros, del 28 de Diciembre de 2015, de OTIS ELEVATOR COMPANY: Un dispositivo de absorción de choques para un transportador de pasajeros, el transportador de pasajeros incluye escalones que circulan en un […]
Dispositivo de absorción de choques para transportadores de pasajeros, del 28 de Diciembre de 2015, de OTIS ELEVATOR COMPANY: Un dispositivo de absorción de choques para un transportador de pasajeros, el transportador de pasajeros incluye escalones que circulan en un […]
Rampa mecánica movil para su utilización por personas con o sin silla de ruedas, del 20 de Julio de 2015, de AGEITOS RIOS, Juan Antonio: 1. Rampa mecánica móvil para su utilización por personas con o sin silla de ruedas, caracterizada porque comprende: - Una plataforma móvil con dos partes, una horizontal […]
Apoyo para una sección de bastidor de un dispositivo para el transporte de personas, del 15 de Julio de 2015, de KONE CORPORATION: Apoyo para una sección de armazón de un dispositivo para el transporte de personas guiado de forma similar a un arco de curva espacial, formado por varias consolas […]
 Pasillo o rampa móvil y método de mantenimiento de un pasillo o rampa móvil, del 31 de Enero de 2013, de KONE CORPORATION: Un pasillo móvil, en el que existe un transportador , el cual pasillo móvil es un pasillo móvil de estructura baja,apropiado para ser instalado […]
Pasillo o rampa móvil y método de mantenimiento de un pasillo o rampa móvil, del 31 de Enero de 2013, de KONE CORPORATION: Un pasillo móvil, en el que existe un transportador , el cual pasillo móvil es un pasillo móvil de estructura baja,apropiado para ser instalado […]
 Sistema de transporte para pasajeros/mercancías, del 21 de Noviembre de 2012, de THYSSENKRUPP ELEVATOR INNOVATION CENTER S.A: Sistema de transporte para pasajeros / mercancías que tiene:
1a) una estructura portante (1a);
1b) una zona de embarque/desembarque (1b);
1c) un equipo […]
Sistema de transporte para pasajeros/mercancías, del 21 de Noviembre de 2012, de THYSSENKRUPP ELEVATOR INNOVATION CENTER S.A: Sistema de transporte para pasajeros / mercancías que tiene:
1a) una estructura portante (1a);
1b) una zona de embarque/desembarque (1b);
1c) un equipo […]
 Pasillo móvil, rampa móvil o escalera mecánica, del 13 de Junio de 2012, de KONE CORPORATION: Pasillo móvil, rampa móvil o escalera mecánica, que comprende
- un medio de alimentación , y
- un transportador con un extremo accionado […]
Pasillo móvil, rampa móvil o escalera mecánica, del 13 de Junio de 2012, de KONE CORPORATION: Pasillo móvil, rampa móvil o escalera mecánica, que comprende
- un medio de alimentación , y
- un transportador con un extremo accionado […]