SISTEMA DE NAVEGACION PARA VEHICULOS.
Un sistema de navegación para vehículos que puede presentar de manera precisa la posición de un vehículo con el sistema de navegación montado en el mismo,
y una dirección objetivo cuando el vehículo está detenido o se mueve a velocidad lenta. El sistema incluye una unidad que detecta un estado de desplazamiento del vehículo, una unidad que juzga si el vehículo está o no detenido o moviéndose a baja velocidad, y una unidad que alisa los datos de posicionamiento GPS de manera que los datos de error de posicionamiento GPS son anulados unos con otros o compensados cuando el vehículo está detenido o moviéndose a baja velocidad. El sistema incluye además una unidad que calcula la posición actual en base a los datos de posicionamiento GPS alisados. La unidad de alisamiento presenta a la salida nuevos datos de posicionamiento, por ejemplo basados en datos de posicionamiento GPS actuales y datos de posicionamiento GPS anteriores
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200700859.
Solicitante: HONDA MOTOR CO., LTD..
Nacionalidad solicitante: Japón.
Dirección: 1-1, MINAMIAOYAMA 2-CHOME,MINATO-KU, TOKYO.
Inventor/es: SHIRAISHI,MOTOATSU.
Fecha de Solicitud: 22 de Junio de 2006.
Fecha de Publicación: .
Fecha de Concesión: 26 de Agosto de 2010.
Clasificación Internacional de Patentes:
- G01C21/28 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 21/00 Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968). › con correlación de datos provenientes de varios instrumentos de navegación.
- G01S5/14B3
Clasificación PCT:
- G01C21/28 G01C 21/00 […] › con correlación de datos provenientes de varios instrumentos de navegación.
- G01S5/14 G01 […] › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
Fragmento de la descripción:
Sistema de navegación para vehículos.
Objeto de la invención
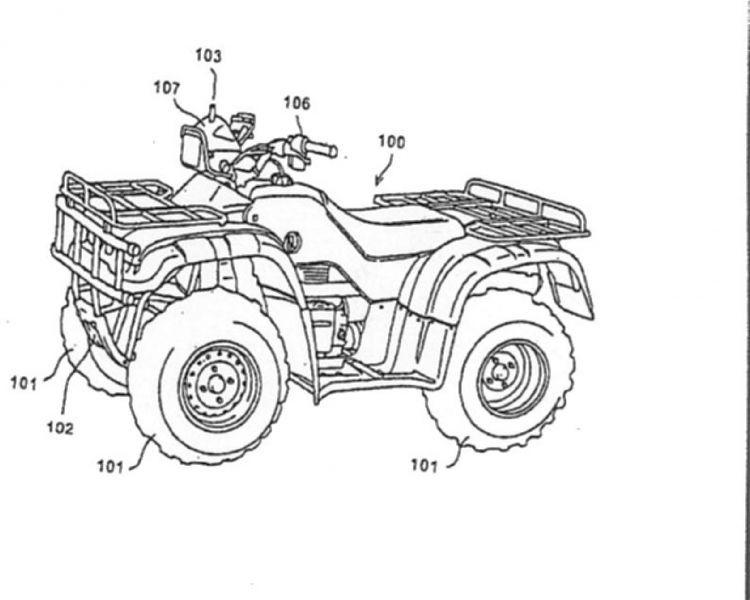
La presente invención se refiere a un equipo electrónico de navegación especialmente diseñado para vehículos automóviles de cualquier tipo, cuyos componentes para su correcta función reciben ondas de radio procedentes de diferentes satélites, con el fin de reconocer una posición actual de un vehículo, en el cual se haya instalado el propio equipo de navegación.
Antecedentes de la invención
Un sistema de navegación GPS, con la utilización de un satélite artificial, ha sido utilizado hasta ahora como un sistema de navegación para diversos vehículos automóviles, aviones y buques y para ello un receptor GPS, utilizado en este sistema de navegación, está configurado para recibir ondas de radio desde diversos satélites GPS, para medir un punto de recepción a partir de datos de una determinada distancia entre cada uno de los satélites GPS y los correspondientes datos de posicionamiento de salida.
En este caso, la seudo-distancia prevista, contiene una compensación del tiempo del receptor y sin embargo la precisión de posicionamiento del GPS incluye componentes de arropes debido a las siguientes razones:
- a) La precisión se reduce debido a que se produce un error mientras las ondas de radio pasan a través de la ionosfera.
- b) La precisión se reduce debido a un fenómeno de multirruta, en el que las ondas de radio de las señales desde los satélites se mezclan con componentes de señales reflejadas desde el suelo, edificios, montañas y elementos similares cambiando la precisión con el tiempo, puesto que el estado de dichos obstáculos varía.
Por lo tanto, un sistema de navegación simple, sin ninguna unidad de navegación autónoma montada, presenta un problema técnico en el sentido de que un puntero en una pantalla que indica una posición actual de un vehículo que tenga instalado el equipo de navegación se mueve aunque el vehículo este parado.
Para resolver dicho problema técnico, existen algunos medios y patentes pendientes en trámite referidas a una técnica que impide que el indicador de la posición actual se mueva mientras el vehículo esta en reposo y en esta técnica la información de la posición actual obtenida por los medios de posicionamiento del GPS se ignora cuando se detiene el vehículo y los medios de detección conocen que el vehículo está completamente parado.
Resolución de los problemas existentes con la presente invención
El inconveniente antes citado se debe a que puede producirse un error de posicionamiento del GPS mientras el vehículo se esta desplazando a baja velocidad en un atasco de tráfico o situación similar, así como mientras el vehículo está parado por lo tanto, si la información de la posición actual se ignora cuando se detecta que el vehículo esta parado, una información de posición errónea aparecen pantalla mientras el vehículo se está desplazando a baja velo- cidad.
Si la técnica convencional antes citada no solamente se aplica al momento en que el vehículo está parado sino que también se extiende al tiempo en el que el vehículo se está desplazando a baja velocidad, existe un problema técnico de que la posición actual determinada en último lugar difiera en gran medida de la posición actual real si el vehículo se sigue desplazando a baja velocidad.
Uno de los objetos de la presente invención, es resolver los problemas antes citados de la técnica convencional y proporcionar un medio de navegación para vehículos que pueda reconocer con precisión la posición y la dirección objetivo de un vehículo, que tenga instalado el equipo electrónico de navegación aún cuando el vehículo este parado o desplazándose a baja velocidad.
Descripción de la invención
Para poder conseguir el objetivo antes citado, la presente invención consiste en un equipo electrónico de navegación para vehículos que realiza el cálculo de posicionamiento del GPS basado en las ondas de radio transmitidas desde una pluralidad de satélites GPS para obtener una posición actual basada en datos del posicionamiento. Este equipo electrónico de navegación para vehículos está caracterizado por incluir una primera unidad que detecta un estado de desplazamiento de un vehículo, una segunda unidad que funciona sobre la base de un resultado de la detección de si una velocidad de desplazamiento del vehículo es menor que la velocidad de referencia, una tercera unidad que filtra los datos de posicionamiento del GPS cuando la velocidad de desplazamiento se considera que es menor que la velocidad de referencia y una cuarta unidad que calcula la posición actual sobre la base de los datos de posicionamiento del GPS filtrados.
Según un aspecto antes citado aunque el vehículo esté parado o desplazándose a baja velocidad en el momento en el que errores de los datos de posicionamiento del GPS afectan, en gran medida a la visualización de la posición actual se filtran los datos de posicionamiento del GPS y los componentes de errores se cancelan entre sí o son objeto de compensación por lo tanto la posición actual se puede reconocer con absoluta precisión.
Además de todo lo anteriormente descrito la posición actual se puede reconocer ejecutando el cálculo de posicionamiento del GPS aún cuando el vehículo se esté desplazando a baja velocidad, y en consecuencia el guiado es posible aún cuando el vehículo esté obligado a desplazarse a baja velocidad en el momento de encontrarse en un atasco de tráfico o situación similar.
Descripción de las figuras
Para una mejor comprensión de las características generales anteriormente expuestas, se acompañan unos dibujos que nos muestran gráficamente representado y en forma esquemática, un caso preferente de realización práctica del equipo electrónico de navegación para vehículos automóviles objeto del presente registro, haciendo constar que dada la condición eminentemente informativa de los dibujos, las figuras diseñadas en los mismos deberán ser examinadas con el más amplío criterio y sin carácter limitativo de parte alguna en cuyas figuras se ha representado lo siguiente:
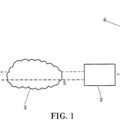
La figura 1 muestra un diagrama de bloques en el que se ilustra una configuración de una parte principal del equipo de navegación para vehículos automóviles de constitución electrónica según la presente invención.
La figura 2 muestra un diagrama de flujo que representa una operación de la forma de realización según la presente invención.
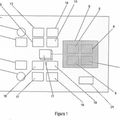
La figura 3 muestra una vista frontal que ilustra un ejemplo de visualización (modo "navi") de un panel de presentación visible.
La figura 4 muestra una vista frontal que ilustra un ejemplo de visualización (modo de brújula) de presentación visible.
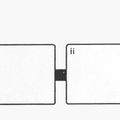
La figura 5 muestra una vista representando un estado operativo en el que los ejemplos de los paneles de visualización cambian en respuesta a las operaciones que realiza un conmutador "Mode".
Realización preferente de la invención
Siempre refiriéndonos a los dibujos adjuntos hay que hacer constar que en las distintas figuras diseñadas en los mismos, se han incorporado acotaciones numéricas relacionadas con las descripciones que de sus características y funcionamiento se realiza a continuación, facilitando de este modo su inmediata localización, en los que la figura 1 corresponde a un diagrama de bloques con la configuración del equipo de navegación (1) instalado en un vehículo automóvil, cuyo medio de navegación es simple, no teniendo un sistema de navegación autónomo instalado y que calcula posición actual sobre la base de datos de posicionamiento del GPS.
En dicho diagrama de bloques (1), se dispone incorporado un receptor del GPS (2) que recibe periódicamente señales del GPS transmitidas desde una pluralidad de satélites artificiales y en donde un sensor (3) de velocidad del vehículo, detecta una velocidad de desplazamiento del mismo con el sistema de navegación instalado, sobre la base de las revoluciones de las ruedas y de este modo el receptor GPS (2) y el sensor (3) de la velocidad del vehículo, quedarán conectados a un "bus" del equipo (4) con una interfaz serie (5) interpuesta.
Una unidad CPU (6) incorporada en el diagrama de bloques, calcula la posición actual (latitud y longitud) del vehículo con el equipo electrónico de navegación instalado y la hora actual sobre la base de una pluralidad de señales del GPS recibidas por el receptor GPS (2) y detecta la dirección...
Reivindicaciones:
1. Sistema de navegación para vehículos, destinado a realizar un cálculo de posicionamiento del GPS sobre la base de las ondas de radio transmitidas desde una pluralidad de satélites del GPS para obtener una posición actual basada en los datos de posicionamiento, estando el sistema de navegación para vehículos caracterizado porque comprende:
- una unidad de detección de un estado de desplazamiento de un vehículo;
- una unidad que opera sobre la base de un resultado de la detección, en base a si la velocidad de desplazamiento del vehículo es menor que una velocidad de referencia;
- una unidad de filtro de los datos de posicionamiento del GPS cuando la velocidad de desplazamiento se considera que es menor que la velocidad de referencia, y
- una unidad de cálculo que la posición actual en base a los datos de posicionamiento del GPS filtrados.
2. Sistema de navegación para vehículos según la reivindicación 1, en el que la unidad de filtro alisa los datos de posicionamiento sobre la base de los datos de posicionamiento del GPS actuales y los datos de posicionamiento del GPS anteriores.
Patentes similares o relacionadas:
SISTEMA PARA SEGUIR LA TRAYECTORIA BASADO EN GPS, del 23 de Marzo de 2011, de SPORTVISION INC: Un método para seguir la trayectoria de un objeto, que comprende los pasos de: usar GPS para seguir la trayectoria del objeto; recibir datos GPS acerca […]
 SISTEMA Y PROCEDIMIENTO PARA INTEGRACION DE UNA RED INFORMATICA INALAMBRICA EN TECNOLOGIA DE DETERMINACION DE POSICION, del 18 de Octubre de 2010, de QUALCOMM INCORPORATED: Un dispositivo de comunicación móvil para suministrar información de posición a una aplicación, que comprende:
primeros medios para recibir una solicitud […]
SISTEMA Y PROCEDIMIENTO PARA INTEGRACION DE UNA RED INFORMATICA INALAMBRICA EN TECNOLOGIA DE DETERMINACION DE POSICION, del 18 de Octubre de 2010, de QUALCOMM INCORPORATED: Un dispositivo de comunicación móvil para suministrar información de posición a una aplicación, que comprende:
primeros medios para recibir una solicitud […]
 PROCEDIMIENTO Y SISTEMA DE LOCALIZACION Y DISPOSITIVO PORTATIL LOCALIZABLE, del 30 de Agosto de 2010, de NAVENTO TECHNOLOGIES, S.L: Procedimiento y sistema de localización y dispositivo portátil localizable.
Procedimiento de localización de un dispositivo portátil desde […]
PROCEDIMIENTO Y SISTEMA DE LOCALIZACION Y DISPOSITIVO PORTATIL LOCALIZABLE, del 30 de Agosto de 2010, de NAVENTO TECHNOLOGIES, S.L: Procedimiento y sistema de localización y dispositivo portátil localizable.
Procedimiento de localización de un dispositivo portátil desde […]
 REDUCCION DE INTERFERENCIA CRUZADA EN UN RECEPTOR GPS Y UN SISTEMA DE COMUNICACION COMBINADOS, del 24 de Junio de 2010, de SNAPTRACK INC.: Un método para reducir la interferencia en un receptor de un sistema de posicionamiento por satélites, debida a las transmisiones […]
REDUCCION DE INTERFERENCIA CRUZADA EN UN RECEPTOR GPS Y UN SISTEMA DE COMUNICACION COMBINADOS, del 24 de Junio de 2010, de SNAPTRACK INC.: Un método para reducir la interferencia en un receptor de un sistema de posicionamiento por satélites, debida a las transmisiones […]
 SISTEMAS INTEGRADOS DE CARTOGRAFIA Y DE AUDIO, del 1 de Junio de 2010, de NAVICO, INC: Un sistema de cartografía por sónar integrado que comprende: un transductor de sónar para emitir una señal de sónar a través de un […]
SISTEMAS INTEGRADOS DE CARTOGRAFIA Y DE AUDIO, del 1 de Junio de 2010, de NAVICO, INC: Un sistema de cartografía por sónar integrado que comprende: un transductor de sónar para emitir una señal de sónar a través de un […]
 DISPOSITIVO QUE MONTADO EN UN VEHICULO, PROPORCIONA UNA SERIE DE SERVICIOS ORIENTADOS A UNA CIRCULACION CONTROLADA, del 8 de Enero de 2010, de NEW TECHNOLOGIES GLOBAL SYSTEMS SL: El dispositivo, que se coloca en un vehículo, dispone entre otros, de los siguientes sensores:
- Un módulo embebido GSM/GPRS.
- Un módulo de memoria con las carreteras […]
DISPOSITIVO QUE MONTADO EN UN VEHICULO, PROPORCIONA UNA SERIE DE SERVICIOS ORIENTADOS A UNA CIRCULACION CONTROLADA, del 8 de Enero de 2010, de NEW TECHNOLOGIES GLOBAL SYSTEMS SL: El dispositivo, que se coloca en un vehículo, dispone entre otros, de los siguientes sensores:
- Un módulo embebido GSM/GPRS.
- Un módulo de memoria con las carreteras […]
 SISTEMA PORTATIL DE ANALISIS PARA LA ELABORACION DE MAPAS DE CONTAMINANTES Y OLORES, del 1 de Septiembre de 2008, de CONSEJO SUPERIOR INVESTIG. CIENTIFICAS: Sistema portátil de análisis para la elaboración de mapas de contaminantes y olores.#La presente invención detalla un sistema portátil para el análisis de contaminantes y olores […]
SISTEMA PORTATIL DE ANALISIS PARA LA ELABORACION DE MAPAS DE CONTAMINANTES Y OLORES, del 1 de Septiembre de 2008, de CONSEJO SUPERIOR INVESTIG. CIENTIFICAS: Sistema portátil de análisis para la elaboración de mapas de contaminantes y olores.#La presente invención detalla un sistema portátil para el análisis de contaminantes y olores […]
Localización dentro de un entorno usando fusión de sensores, del 4 de Diciembre de 2019, de THE BOEING COMPANY: Un aparato que comprende: una pluralidad de sistemas de datos configurados para generar una pluralidad de flujos de datos en la cual la pluralidad de flujos […]