SISTEMA DE CONTROL ANTICOLISION PARA UN VEHICULO.
Sistema de control anticolisión para al menos un primer vehículo (AT) previsto de pilotaje automático a bordo,
que permite movimientos bidireccionales en una única vía bajo el comando de una unidad de control del tráfico automatizado (CTA, CBTC) en el suelo, dicho sistema comprende: - una unidad de control de la señalización (AWS) que comanda las señales en el suelo (S1, S12, ...) sobre una sección de vía de circulación monodireccional (AWS TS), - un primer modo de comando por defecto, según el cual la unidad de control de la señalización (AWS) impone un movimiento monodireccional al vehículo que se desplaza sobre la sección de vía de circulación monodireccionalmente (AWS TS), caracterizado porque, es activable un segundo modo de comando, según el cual un desplazamiento del vehículo (AT) en sentido opuesto sobre por lo menos una parte (CBTC TS) de la sección de vía de circulación inicialmente monodireccional (AWS TS) se inicia con una solicitud (CBTC OnIy) de demanda de prioridad de comando resultante de la unidad de control del tráfico automatizado (CBTC) y enviada a la unidad de control de la señalización (AWS) que devuelve una señal de autorización (RESP) a la solicitud
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2007/000218.
Solicitante: SIEMENS TRANSPORTATION SYSTEMS S.A.S.
Nacionalidad solicitante: Francia.
Dirección: 150 AVENUE DE LA REPUBLIQUE, 92320 CHATILLON.
Inventor/es: DEGOUGE,REGIS, PINORI,LAURENT, CALLET,STEPHANE.
Fecha de Publicación: .
Fecha Concesión Europea: 23 de Junio de 2010.
Clasificación Internacional de Patentes:
- B61L27/00C
- B61L27/00E
- B61L27/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B61 FERROCARRILES. › B61L CONTROL DE TRAFICO FERROVIARIO; SEGURIDAD DEL TRAFICO FERROVIARIO (frenos o equipos auxiliares B61H, B61K; estructura de sistemas de agujas E01B). › B61L 27/00 Sistemas centrales de control del tráfico. › Sistemas automáticos, p. ej. mandados por los trenes; Paso al mando manual.
Clasificación PCT:
Fragmento de la descripción:
Sistema de control anticolisión para un vehículo.
La presente invención se refiere a un sistema de control anticolisión para un vehículo según el preámbulo de la reivindicación 1.
La invención se adapta en particular a un vehículo, en dónde se sobreentiende que se refiere a distintos tipos de medios de locomoción, más concretamente en el ámbito del transporte de pasajeros y/o de mercancías. Así por lo tanto, un transporte ferroviario como un tren y sus coches o vagones sobre carriles, un tranvía, pero también un tren sobre neumáticos, con o sin raíles, un trolebús o un autobús al menos un compartimento, vuelven a entrar a título de ejemplo en el marco de la invención. En particular, algunos de estos vehículos pueden incluir medios de control o de comando, comúnmente también llamados controladores, que permiten generar o realizar las aplicaciones de comando, por ejemplo para una dirección asistida del vehículo, incluso el autoguiado del vehículo si éste no tiene conductor o se puede liberar de este.
Por razones de claridad, la invención será aclarada sobre un ejemplo de un vehículo, así como un primer vehículo guiado sobre una vía ferroviaria. Un sistema de control anticolisión, por lo menos para este primer vehículo, se conoce hoy, si el vehículo esta provisto de un pilotaje automático a bordo, que permite movimientos bidireccionales sobre una vía única bajo el comando de una unidad de control del tráfico automatizado, denominado más adelante en la invención del tipo ATC o CBTC en el suelo. En este caso, este sistema de guiado es particularmente bien adaptado a un tren o a una lanzadera sin conductor que puede efectuar idas y vueltas sobre la misma vía o una media vuelta cambiando de vía del tipo monodireccional. No obstante, este primer vehículo de pilotaje automático, circula sobre porciones de vía para las cuales una unidad de control de señalización, denominada más tarde del tipo AWS, comanda a las señales en el suelo sobre una sección de vía de circulación monodireccional, denominada más tarde AWS TS o del tipo AWS TS. Estas señales pueden ser luces de señalización, comandadas por relés eléctricos o mecánicos, etc., por regla general utilizadas para vehículos pilotados manualmente por un conductor. Sobre tales secciones AWS TS, existe un primer método de comando por defecto según el cual la unidad de control de la señalización AWS impone un movimiento monodireccional a cada vehículo que se desplaza sobre la sección de vía de circulación monodireccional AWS TS (la dirección única es comandada por la unidad de control de la señalización AWS). En pocas palabras, la unidad de control de señalización AWS impone una prioridad de comando sobre la unidad de control del tráfico automatizado CBTC, en particular para evitar una colisión del primer vehículo con otro vehículo exento de pilotaje automático y sin embargo que se desplaza sobre la misma vía que el primer tren. Esta prioridad de comando también puede servir para obligar al primer vehículo equipado a responder a una orden (frenado, bloqueo, etc.) que se desplaza sobre una porción de vía en modo autopilotado.
Así pues, a causa de la prioridad de comando de la unidad de control de la señalización AWS sobre el vehículo autoguiado, se conoce un primer sistema anticolisión, de tal modo que limita trayectos en sentidos opuestos del vehículo autoguiado que podría poner en peligro a otros vehículos acercándose. Esta prioridad de comando tiene un efecto tranquilizador que limita no obstante la facultad de desplazamientos bidireccionales del primer vehículo autoguiado.
Dos ejemplos conocidos y que ilustran el comando de prioridad se dan a través de las figuras siguientes:
Figura 1: un sistema anticolisión adaptado para los vehículos de pilotaje automático y los vehículos de pilotaje manual,
Figura 2: un sistema anticolisión adaptado para vehículos de pilotaje automático.
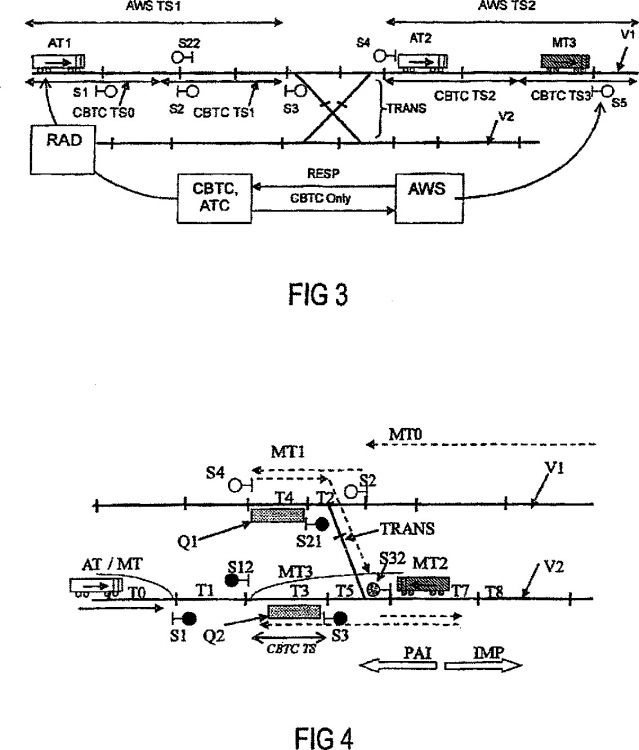
La figura 1 representa una vía (ferroviaria) sobre la cual se desplazan dos primeros vehículos autoguiados AT1, AT2 y otros dos vehículo MT1, MT2 guiados manualmente, mediante al menos una unidad de control de señalización del tipo AWS que comprende las señales del tipo "manuales" S1, S2, S22, S3, S4, S5 (por ejemplo semáforos en verde/en rojo de bloqueo). Los dos primeros vehículo AT1, MT1 de diferentes tipos - automático y manual - se encuentran sobre una sección de vía AWS TS1 (del tipo AWS TS) que, ella misma puede comandarse por una unidad de control del tráfico automatizado CBTC (no representado) sobre una misma porción de vía CBTC TS1 (del tipo CBTC TS) según una dirección u otra. Debido a la presencia de los dos vehículos AT1, MT1 sobre esta porción común AWS TS1, CBTC TS1, la prioridad de comando de la unidad de control de señalización AWS (no representada) prevalece sobre la unidad de control del tráfico automatizado CBTC, de tal modo que mantenga una circulación estrictamente monodireccional para los dos vehículos MT1, AT1 aunque el vehículo AT1 autoguiable tiene la facultad de circular en direcciones opuestas en la vía. Así, el vehículo AT1 inicialmente autoguiable es comandado totalmente por la unidad de control de señalización AWS.
Una segunda sección de vía AWS TS2 controlada por una unidad de control de señalización del tipo AWS se yuxtapone a la porción precedente AWS TS1 del mismo tipo AWS, no obstante a través de una zona de tránsito TR12 únicamente bajo el control de la unidad de control de señalización AWS o de otra red análoga. La zona de tránsito TR12 comprende según la figura 1 un vehículo AT2 de tipo autoguiable y que se desplaza hacia la segunda sección de vía AWS TS2, sobre la cual un vehículo MT2 de pilotaje manual se controla por una unidad de control de la señalización del tipo AWS. La zona de red viaria AWS TS12 no consta de ninguna conexión con cualquier unidad de control del tráfico automatizado CBTC, es por eso que el vehículo AT2 mismo autoguiable permanece bajo comando de la unidad de control de señalización del tipo AWS sobre el cual se desplaza. En la figura 1 y análogamente a la primera sección de vía, una porción de vía CBTC TS2 también está prevista para un tren autoguiable al nivel de la segunda sección de vía AWS TS2 comandada por una unidad de control de señalización del tipo AWS. En particular, el vehículo autoguiable AT2 está en la proximidad de la segunda sección de vía AWS TS2 que también incluye un segundo vehículo MT2 de tipo manual y que circula en una dirección definida. Si esta dirección es inversa a la del primer vehículo autoguiable AT2 entonces en la entrada sobre la segunda sección de vía AWS TS2, el comando de prioridad de la unidad de control de señalización del tipo AWS prevalece sobre el autoguiado del primer vehículo autoguiable AT2. Si este no es el caso, la señalización es permisiva y autoriza una entrada y un desplazamiento sobre la segunda porción AWS TS2 del tipo AWS. No obstante, sobre esta última porción, una unidad que controla el tráfico automatizado CBTC no podrá en ningún caso modificar la dirección de desplazamiento del vehículo autoguiable AT2, porque ésta es impuesta por la dirección definida del vehículo manual MT2, lo que asegura que el vehículo autoguiable AT2 no pueda entrar en colisión con el vehículo manual MT2.
La figura 2 representa ahora un ejemplo cuyo reparto de las vías es análogo al de la figura 1. En cambio, cuatro vehículos autoguiables AT1, AT2, AT3, AT4 están presentes y circulan cada uno sobre la primera porción CBTC TS1, la zona de tránsito TR12 y la segunda porción CBTC TS2. A causa de la ausencia de vehículos de tipo manual y además de la presencia de señalizaciones en el suelo, la primera y segunda porción de vía CBTC TS1, CBTC TS2 no están más bajo el comando de prioridad de una unidad de control de la señalización de tipo AWS. En otros términos, sobre estas mismas secciones de vía CBTC TS1, CBTC TS2, todos los vehículos autoguiados pueden allí ser autoguiados en sentidos opuestos sin riesgo de colisión bajo el comando de la unidad que controla del tráfico automatizado CBTC que garantiza a todos los vehículos contra un riesgo de colisión. Todas las señales (por ejemplo de tipo visuales) S1, S2, S22, S3 son entonces inhibidas / apagadas sobre estas secciones, para no inducir a un vehículo a error, antagónicamente a las instrucciones de la unidad de control del tráfico automatizado CBTC. La señal S4, S5 está aquí fuera de la sección del tipo CBTC: son pues todavía activables por la unidad de control de señalización AWS. Si...
Reivindicaciones:
1. Sistema de control anticolisión para al menos un primer vehículo (AT) previsto de pilotaje automático a bordo, que permite movimientos bidireccionales en una única vía bajo el comando de una unidad de control del tráfico automatizado (CTA, CBTC) en el suelo,
dicho sistema comprende:
- una unidad de control de la señalización (AWS) que comanda las señales en el suelo (S1, S12, ...) sobre una sección de vía de circulación monodireccional (AWS TS),
- un primer modo de comando por defecto, según el cual la unidad de control de la señalización (AWS) impone un movimiento monodireccional al vehículo que se desplaza sobre la sección de vía de circulación monodireccionalmente (AWS TS),
caracterizado porque,
es activable un segundo modo de comando, según el cual un desplazamiento del vehículo (AT) en sentido opuesto sobre por lo menos una parte (CBTC TS) de la sección de vía de circulación inicialmente monodireccional (AWS TS) se inicia con una solicitud (CBTC OnIy) de demanda de prioridad de comando resultante de la unidad de control del tráfico automatizado (CBTC) y enviada a la unidad de control de la señalización (AWS) que devuelve una señal de autorización (RESP) a la solicitud.
2. Sistema según la reivindicación 1,
por la cual la solicitud (CBTC OnIy) y la señal de autorización (RESP) son señales de tipo binario adaptadas para al menos una porción predefinida de la sección de circulación monodireccional (AWS TS).
3. Sistema según reivindicación 1 o 2,
por la cual la solicitud (CBTC OnIy) se inicia cuando se asegura que hay una ausencia de vehículo (MT) que se encuentra sobre la sección de vía de circulación inicialmente monodireccional (AWS TS) o en su proximidad, y cuando dicho vehículo (MT) es incompatible a un comando de la unidad de control de tráfico automatizado (CBTC).
4. Sistema según una de las reivindicaciones 1 a 3,
por la cual la respuesta (RESP) es librada por un relé o un ordenador lógico de la unidad de control de la señalización (AWS).
5. Sistema según una de las reivindicaciones 1 a 4,
por la cual en el caso de una señal de autorización (RESP) aceptada, la unidad de control del tráfico automatizado (CBTC) comanda por lo menos una sección autorizada de circulación bidireccional (CBTC TS), bajo reserva de que la unidad de control de señalización (AWS) garantice que ningún otro vehículo (MT) con un pilotaje manual circule o sea autorizado a circular sobre la sección autorizada a la circulación bidireccional (CBTC TS).
6. Sistema según la reivindicación 5,
según la cual la unidad de control del tráfico automatizado (CBTC) prohíbe al primer vehículo (AT) la circulación o el acceso sobre una porción (T3) de sección autorizada a la circulación bidireccional (CBTC TS) si el primer vehículo (AT) y el segundo vehículo (MT) están acercándose mutuamente, en particular si el segundo vehículo (MT) alcanza la porción (T3) antes del primer vehículo (AT).
7. Sistema según una de las reivindicaciones 5 o 6,
según la cual el segundo vehículo (MT) con pilotaje manual o esta exento de pilotaje automático a bordo, o esta provisto de un pilotaje automático a bordo que puede ser desactivado e incluso defectuoso o con el cual se desconecta provisionalmente la unidad de comando de tráfico automatizada (CBTC).
8. Sistema según una de las reivindicaciones 4 a 7,
según la cual la unidad de control de señalización (AWS) comanda elementos activos o señales visuales para el frenado o el bloqueo del segundo vehículo (MT) sobre o en la periferia de una sección autorizada (T3) a la circulación bidireccional (CBTC TS).
9. Sistema según una de las reivindicaciones 4 a 8,
según la cual la unidad de control de señalización (AWS) activa los elementos o señales de frenado, bloqueo o de circulación obligatoria monodireccional del primer vehículo (AT) en periferia (T1) de una sección autorizada (T3) en circulación bidireccional (CBTC TS).
10. Sistema según una de las reivindicaciones 4 a 9,
según la cual la unidad de control de señalización (AWS) comprende un adaptador de interoperatividad para evaluar la prioridad de varias solicitudes que proceden de una pluralidad de unidades de control del tráfico automatizado (CBTC), éstas pueden tener en particular distintos protocolos de comando.
11. Sistema según una de las reivindicaciones anteriores,
por la cual la señal de autorización (RESP) tiene una validez de duración predeterminada por la unidad de control de señalización (AWS) y puede ser desactivada en cada momento por inhibición.
12. Sistema según una de las reivindicaciones anteriores,
por la cual los vehículos son transportes públicos, como autobuses guiados, tranvías, trolebuses, trenes u otras unidades ferroviarias.
13. Sistema según una de las reivindicaciones anteriores,
por la cual los pares de secciones yuxtapuestas (AWS TS, CBTC TS) se introducen al nivel de una zona con riesgo de colisión inicialmente comandada por la unidad de control de señalización (AWS) o por la unidad de control del tráfico automatizado (CBTC).
Patentes similares o relacionadas:
Sistema y procedimiento para el acoplamiento / desacoplamiento de vehículos guiados en movimiento durante el funcionamiento, del 1 de Julio de 2020, de Siemens Rail Automation S.A.U: Procedimiento para el acoplamiento / desacoplamiento de una unidad de vehículo guiado A2 a/de una unidad de vehículo guiado A1, mientras que dichas unidades de vehículos guiados […]
 Disposiciones de estación de accionamiento, del 29 de Enero de 2020, de Rail-Veyor Technologies Global Inc: Un conjunto de accionamiento para un sistema de transporte ferroviario para transportar materiales a granel a través de una pluralidad de vagones adaptados para formar […]
Disposiciones de estación de accionamiento, del 29 de Enero de 2020, de Rail-Veyor Technologies Global Inc: Un conjunto de accionamiento para un sistema de transporte ferroviario para transportar materiales a granel a través de una pluralidad de vagones adaptados para formar […]
Sistema de localización de trenes a lo largo de las vías de una red ferroviaria, del 18 de Diciembre de 2019, de CLEARSY: Sistema de localización de trenes a lo largo de las vías de una red ferroviaria para una arquitectura de control automático de trenes, […]
Vehículo de transporte de artículos, del 20 de Noviembre de 2019, de DAIFUKU CO., LTD.: Un vehículo de transporte de artículos para usar en una instalación de transporte de artículos en la que una pluralidad de vehículos de transporte de artículos se […]
Sistema y procedimiento para la evacuación de vehículos ferroviarios, del 24 de Octubre de 2019, de Siemens Mobility GmbH: Procedimiento para instalar automáticamente una zona de protección alrededor de un vehículo ferroviario en evacuación (Rail Vehicle in Evacuation) - en lo […]
Procedimiento para controlar un vehículo de transporte terrestre, vehículo de transporte terrestre, equipo terrestre y sistema de transporte, del 2 de Octubre de 2019, de ALSTOM Transport Technologies: Procedimiento para controlar un vehículo de transporte terrestre que viaja en una vía, comprendiendo la pista, en una dirección de desplazamiento del vehículo de transporte […]
Procedimiento para implementar un tráfico ferroviario automático y sistema de tráfico ferroviario para implementar un tráfico ferroviario automático, del 27 de Marzo de 2019, de Siemens Mobility GmbH: Procedimiento para implementar un tráfico ferroviario automático con un control de trenes automático y protección de trenes por medio de comunicación de datos entre un […]
Asegurar una transmisión a distancia de un vídeo para el control remoto de un vehículo, del 12 de Marzo de 2019, de SIEMENS S.A.S: Método para asegurar la transmisión a distancia de la imagen de un objeto diseñado para ser captado por un receptor fotosensible de una cámara […]