SISTEMA DE ACCIONAMIENTO DE LAS TRAMPILLAS QUE SEPARAN EL MEZCLADOR DE LA TOLVA EN UNA MAQUINA DE PROYECTAR.
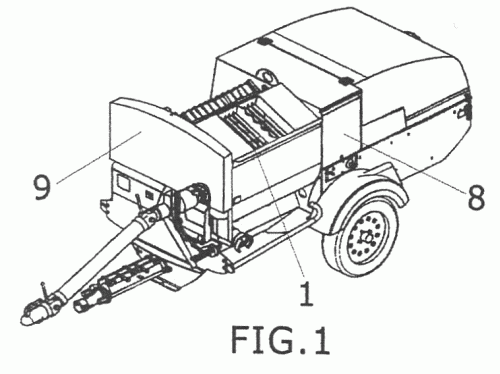
1. Sistema de accionamiento de las trampillas que separan el mezclador de la tolva en una máquina de proyectar de entre los que presentan un mezclador (1) donde se prepara el producto una vez vertido,
unas ventanas (3) para el paso del producto del mezclador (1) a la tolva (2) a partir de la cual el producto es bombeado y después proyectado y unas trampillas (4) que cierran las ventanas (3) cuando no se requiere el paso del producto (3) caracterizado por un cilindro hidráulico (5) que se recoge o expande y que está articulado por su extremo (5.2) extensible a un extremo (6.1) de una manivela (6) cuyo otro extremo (6.2) va unido a un eje (7) donde están fijadas las trampillas (4), con la consiguiente apertura o cierre de las trampillas (4) sobre las ventanas (3).
2. Sistema de accionamiento de las trampillas que separan el mezclador de la tolva en una máquina de proyectar según reivindicación 1 caracterizado porque cuando el cilindro hidráulico (5) se recoge, la manivela (6) gira en el sentido de las agujas del reloj con la consiguiente apertura de las trampillas (4) y el paso del producto a la tolva (2).
3. Sistema de accionamiento de las trampillas que separan el mezclador de la tolva en una máquina de proyectar según reivindicación 1 caracterizado porque cuando el cilindro hidráulico (5) se expande, la manivela (6) gira en el sentido contrario a las agujas del reloj, con el consiguiente cierre de las trampillas (4).
4. Sistema de accionamiento de las trampillas que separan el mezclador de la tolva en una máquina de proyectar según reivindicación 1 caracterizado porque el cilindro hidráulico (5) se acciona desde una palanca (8.1) situada en el cuadro de mandos (8) de la máquina de proyectar.
5. Sistema de accionamiento de las trampillas que separan el mezclador de la tolva en una máquina de proyectar según reivindicación 1 caracterizado porque el cilindro hidráulico (5) está articulado por su extremo (5.1) no extensible al frontal de la máquina de proyectar.
Tipo: Resumen de patente/invención.
Solicitante: IBER-PUTZ, S.L.
Nacionalidad solicitante: España.
Provincia: MADRID.
Inventor/es: ARIAS CLAVERO,JOSE IGNACIO.
Fecha de Solicitud: 30 de Junio de 2005.
Fecha de Publicación: .
Fecha de Concesión: 2 de Febrero de 2006.
Clasificación Internacional de Patentes:
- E04G21/04 CONSTRUCCIONES FIJAS. › E04 EDIFICIOS. › E04G ANDAMIAJES; MOLDES; ENCOFRADOS; HERRAMIENTAS O ACCESORIOS PARA LA CONSTRUCCION, O SU EMPLEO; MANIPULACIÓN DE LOS MATERIALES DE CONSTRUCCION EN LA PROPIA OBRA; REPARACION, DEMOLICION U OTROS TRABAJOS EN EDIFICIOS CONSTRUIDOS. › E04G 21/00 Preparación, transporte o trabajo de los materiales o de elementos de construcción in situ ; Otros dispositivos o medidas concernientes a los trabajos de construcción (trabajo de los materiales análogos a la piedra B28D; transporte en general B65G; aparatos de elevación B66; instrumentos de medida G01). › Dispositivos para transportar y distribuir simultáneamente (bombas para hormigón F04).
Clasificación PCT:
- E04G21/04 E04G 21/00 […] › Dispositivos para transportar y distribuir simultáneamente (bombas para hormigón F04).
Patentes similares o relacionadas:
SISTEMA DE CONSTRUCCIÓN ROBOTIZADO, del 17 de Octubre de 2019, de EVOLUTION CONSTRUCTION SYSTEM, S.L: Sistema de construcción robotizado que comprende un robot cartesiano que puede ser elevado de manera automática según la construcción va ganando altura, que […]
ROBOT PARA REFORMAS Y REHABILITACIONES, del 17 de Octubre de 2019, de EVOLUTION CONSTRUCTION SYSTEM, S.L: Robot para reformas y rehabilitaciones de edificios que comprende una estructura de perfiles que comprende, al menos, dos largueros paralelos fijos, verticales o longitudinales, […]
SISTEMA DE CONSTRUCCIÓN ROBOTIZADO., del 10 de Octubre de 2019, de EVOLUTION CONSTRUCTION SYSTEM, S.L: Sistema de construcción robotizado que comprende un robot cartesiano tipo pórtico que puede ser elevado de manera automática según la construcción va ganando altura, que cuenta […]
ROBOT PARA REFORMAS Y REHABILITACIONES., del 10 de Octubre de 2019, de EVOLUTION CONSTRUCTION SYSTEM, S.L: Robot para restauraciones y rehabilitaciones de edificios que comprende una estructura de perfiles que comprende, al menos, dos largueros […]
Dispositivo y procedimiento de fabricación de estructuras tridimensionales realizadas en capas sucesivas, del 4 de Abril de 2019, de ROCHER, Xavier: Dispositivo de deposición de material pastoso destinado a la fabricación capa por capa de una estructura tridimensional de grandes dimensiones que comprende: - por lo menos […]
Manipulador de gran tamaño con mástil sometido a pandeo y con medios para la medición de ángulo de giro, del 12 de Marzo de 2019, de SCHWING GMBH: Manipulador de gran tamaño con un mástil sometido a pandeo desplegable, que presenta un asiento giratorio que puede girar alrededor […]
Pluma de camión bomba para hormigón y camión bomba para hormigón, del 1 de Noviembre de 2017, de Zoomlion Heavy Industry Science and Technology Co., Ltd: Una pluma de camión bomba para hormigón que tiene un estado plegado y un estado desplegado, en donde dicha pluma comprende siete secciones de pluma […]
Método y sistema para controlar un manipulador de ingeniería a gran escala, del 6 de Septiembre de 2017, de Hunan Sany Intelligent Control Equipment Co., Ltd: Método para controlar un manipulador de ingeniería a gran escala, estando dotado cada uno de los segmentos de pluma del manipulador de un mecanismo de accionamiento, […]