Sistema de control de un motor para un mecanismo de accionamiento de un montacargas.
Un sistema de control de un motor para un mecanismo de accionamiento de un montacargas que tiene un motor eléctrico (2) conectado operativamente a un miembro de elevación (4) para elevar una carga (6),
estando adaptado el sistema de control del motor para generar una referencia de frecuencia angular final (w*s) para el control del motor 5 eléctrico (2) basándose en datos iniciales que comprenden un valor de punto ajustado limitado (w*s, lim) para una referencia de frecuencia angular que es de régimen limitado (14) y un término de corrección (ws, cor) para una referencia de frecuencia angular, comprendiendo el sistema de control del motor unos medios limitadores (8) de potencia adaptados para generar el término de corrección (ws, cor) para la referencia de frecuencia angular, caracterizado porque los medios limitadores (8) de potencia comprenden unos medios controladores integradores 10 (10), estando adaptados los medios limitadores (8) de potencia para generar el término de corrección (ws, cor) para la referencia de frecuencia angular usando una señal de salida Ip de los medios controladores integradores (10), siendo proporcional el término de corrección (ws, cor) para la referencia de frecuencia angular a la señal de salida lp, incluyendo los datos iniciales de los medios controladores integradores (10) una primera variable proporcional al valor real de la potencia del motor eléctrico (2) y un primer parámetro proporcional a un valor límite de la potencia del motor eléctrico (2), y un cálculo de la señal de salida Ip de los medios controladores integradores (10) comprende restar dicho primer parámetro de dicha primera variable, estando delimitada la señal de salida Ip de los medios controladores integradores (10) de tal manera que siempre sea mayor o igual que cero, y la referencia de frecuencia angular final (w*s) se obtiene restando el término de corrección (w*s, cor) para la referencia de frecuencia angular respecto del valor de punto ajustado limitado (w*s, lim) para la referencia de frecuencia angular.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09177587.
Solicitante: KONECRANES PLC.
Nacionalidad solicitante: Finlandia.
Dirección: Koneenkatu 8 05830 Hyvinkää.
Inventor/es: Salomäki,Janne, Porma,Mikko.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66C13/22 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 13/00 Otras características de estructura o detalles. › para accionamiento eléctrico (transmisión de impulsos de mando B66C 13/40; dispositivos de aplicación general H02P).
- B66D1/48 B66 […] › B66D CABRESTANTES; CABRIAS; APAREJOS, p. ej. POLIPASTOS; TROCOLAS (enrollado y desenrollado de cables con fines de alimentación o almacenado B65H; mecanismos de enrollado o desenrollado de cables para ascensores B66B; dispositivos de elevación especialmente adaptados a los andamios suspendidos E04G 3/32). › B66D 1/00 Mecanismos de enrollamiento de cuerdas, cables o cadenas; Cabrestantes (aparatos de elevación o de tracción portátiles o móviles B66D 3/00). › automáticos.
- G01G19/14 FISICA. › G01 METROLOGIA; ENSAYOS. › G01G DETERMINACION DEL PESO. › G01G 19/00 Aparatos o métodos de pesada adaptados a fines particulares no previstos en los grupos G01G 11/00 - G01G 17/00. › para pesar cargas suspendidas (G01G 3/00 tiene prioridad).
- H02P23/00 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › Disposiciones o métodos para el control de motores de corriente alterna que se caracterizan por un método de control que no sea control por vector.
PDF original: ES-2381541_T3.pdf
Fragmento de la descripción:
Sistema de control de un motor para un mecanismo de accionamiento de un montacargas
ANTECEDENTES DE LA INVENCIÓN
La presente invención se refiere a un sistema de control de un motor para un mecanismo de accionamiento de montacargas según el preámbulo de la reivindicación independiente 1.
Con el fin de mantener un funcionamiento estable de un mecanismo de accionamiento de un montacargas, debe limitarse una velocidad de rotación del motor eléctrico del mecanismo de accionamiento del montacargas de tal manera que la frecuencia de deslizamiento no supera la frecuencia de deslizamiento de extracción. En otras palabras, no debe alcanzarse el par de extracción. El par de extracción disminuye como el cuadrado inverso de la velocidad, de modo que el par de extracción se alcance más fácilmente a velocidades altas que a velocidades bajas.
Un sistema de control de un motor de la técnica anterior para un mecanismo de accionamiento de un montacargas está adaptado para usar datos de pesaje de una carga procedentes de un sensor de pesaje de la carga para limitar la velocidad de rotación del motor eléctrico del mecanismo de accionamiento del montacargas. Los sensores de pesaje de carga adaptados para dar salida a datos de pesaje de la carga son componentes relativamente caros.
BREVE DESCRIPCIÓN DE LA INVENCIÓN
Un objeto de la presente invención es proporcionar un sistema de control de un motor para un mecanismo de accionamiento de un montacargas que sea capaz de limitar la velocidad de rotación del motor eléctrico del mecanismo de accionamiento del montacargas por debajo de la frecuencia de deslizamiento de extracción sin datos de pesaje de carga. El objeto de la invención se alcanza por un sistema de control de un motor para un mecanismo de accionamiento de un montacargas que está caracterizado porque lo que se indica en la reivindicación independiente 1. Las realizaciones preferidas de la invención se describen en las reivindicaciones subordinadas.
La invención se basa en la idea de generar un término de corrección para la referencia de frecuencia angular con unos medios limitadores de potencia que comprenden unos medios controladores e integrados que usan sus datos iniciales una información relativa al valor real de la potencia del motor eléctrico.
Una ventaja del sistema de control de motor de la invención es que el sistema de control de motor no necesita datos de medición relativos al peso de la carga. Otra ventaja es que el sistema de control de motor puede mantener fiablemente la frecuencia de deslizamiento por debajo de la frecuencia de deslizamiento de extracción.
BREVE DESCRIPCIÓN DE LOS DIBUJOS
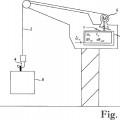
A continuación, se describirá la invención con mayor detalle por medio de realizaciones preferidas con referencia a los dibujos anexos, en los que La figura 1 muestra un mecanismo de accionamiento de un montacargas de bucle abierto que comprende un sistema de control de un motor según una realización de la presente invención;
La figura 2 muestra un mecanismo de accionamiento de un montacargas de bucle cerrado que comprende un sistema de control de un motor según otra realización de la presente invención;
La figura 3 muestra un límite de par y un límite de potencia del mecanismo de accionamiento de montacargas de la figura 1; y La figura 4 muestra resultados de medición obtenidos usando el mecanismo de accionamiento de montacargas según la figura 1.
DESCRIPCIÓN DETALLADA DE LA INVENCIÓN
La figura 1 muestra un mecanismo de accionamiento de un montacargas de bucle abierto que comprende un motor eléctrico 2 conectado operativamente a un miembro de elevación 4 para elevar una carga 6. El motor eléctrico 2 es controlado por un sistema de control de motor según una realización de la presente invención. El sistema de control del motor comprende unos medios limitadores 8 de potencia, unos medios de saturación 12, medios limitadores de régimen 14, unos medios de control 16, unos medios estimadores 18 de potencia y unos medios de modulación de anchura de impulso 20. El sistema de control del motor está adaptado para generar una referencia de frecuencia angular final w*s para control del motor eléctrico 2 basándose en datos iniciales que comprende un valor de punto ajustado limitado w*s, lim para la referencia de frecuencia angular y un término de corrección ws, cor para la referencia de frecuencia angular. En la realización de bucle abierto de la figura 1, la referencia de frecuencia angular final w*s es una referencia de frecuencia angular síncrona y los medios de control 16 son unos medios de control escalares.
En la figura 1, el mecanismo de accionamiento del montacargas de bucle abierto se ha dividido en tres segmentos, a saber un software de aplicación 50, un software de sistema 60 y un equipo 70 de mecanismo de accionamiento de montacargas. El software de aplicación y el software de sistema están adaptados para ser ejecutados por un equipo de procesamiento de datos adecuado. Además del motor eléctrico 2 y el miembro de elevación 4 antes listados, el equipo mecanismo de accionamiento del montacargas comprende un conversor 22 de frecuencia. Todo el equipo de mecanismo del accionamiento del montacargas puede estar compuesto por componentes conocidos.
Los medios de saturación 12 están adaptados para recibir una referencia de frecuencia angular inicial w*s0 generada por unos medios de interfaz de usuario. Los medios de saturación 12 están adaptaos para generar una referencia de frecuencia angular saturada w*s, sat imponiendo un límite superior ws0, max y un límite inferior ws0, min a la referencia de frecuencia angular inicial w*s0. Cuando la referencia de frecuencia angular inicial w*s0 está dentro del rango especificado por el límite inferior y el límite superior, la referencia de frecuencia angular inicial saturada w*s, sat es igual a la referencia de frecuencia angular inicial w*s0. Cuando la referencia de frecuencia angular inicial w*s0 es mayor que el límite superior ws0, max, la referencia de frecuencia anular inicial saturada w*s, sat es igual al límite superior ws0, max. De manera correspondiente, cuando la referencia de frecuencia angular inicial w*s0 es menor que el límite inferior ws0, min la referencia de frecuencia angular inicial saturada w*s, sat es igual al límite inferior ws0, min. El límite inferior ws0, min puede ser la inversa aditiva del límite superior ws0, max, en donde los valores absolutos de los límites superior e inferior son iguales. En una realización alternativa, los medios de saturación pueden estar adaptados para imponer sólo un límite inferior o sólo un límite superior a la referencia de frecuencia angular inicial.
Los medios de saturación 12 están adaptados para alimentar la referencia de frecuencia angular inicial saturada w*s, sat a los medios limitadores 14 de régimen como la señal de entrada de los medios limitadores 14 de régimen. Los medios limitadores 14 de régimen están adaptados para generar el valor de punto ajustado limitado ws, lim para una referencia de frecuencia angular limitando la primera derivada de la referencia de frecuencia angular inicial saturada ws, sat.
Los medios limitadores 14 de régimen se implementan en el software de sistema como sigue frecuencia angular. La notación w*s, lim (n) denota el valor actual y w*s, lim (n-1) denota el valor previo.
La implementación de los medios limitadores 14 de régimen da como resultado el mismo valor absoluto del régimen de cambio para los bordes ascendentes y descendentes. En una realización alternativa, el valor absoluto del régimen de cambio para el borde ascendente puede ser diferente del valor absoluto del régimen de cambio para el borde descendente.
Los medios limitadores 8 de potencia comprenden unos medios controladores integradores 10 destinados a generar una señal de salida lp. Los medios limitadores 8 de potencia están adaptados para generar el término de corrección ws, cor para la referencia de frecuencia angular con la ecuación en donde "sign" es una función signum que extrae el signo de un número verdadero. En otras palabras, el valor absoluto del término de corrección ws, cor es igual a la señal de salida de los medios controladores integradores 10, y el signo del término de corrección ws, cor depende del signo del valor de punto ajustado limitado w*s, lim para la referencia de frecuencia angular. Con el fin de evitar un bucle algebraico, deberá usarse un valor previo del valor de punto ajustado limitado w*s,... [Seguir leyendo]
Reivindicaciones:
1. Un sistema de control de un motor para un mecanismo de accionamiento de un montacargas que tiene un motor eléctrico (2) conectado operativamente a un miembro de elevación (4) para elevar una carga (6) , estando adaptado el sistema de control del motor para generar una referencia de frecuencia angular final (w*s) para el control del motor 5 eléctrico (2) basándose en datos iniciales que comprenden un valor de punto ajustado limitado (w*s, lim) para una referencia de frecuencia angular que es de régimen limitado (14) y un término de corrección (ws, cor) para una referencia de frecuencia angular, comprendiendo el sistema de control del motor unos medios limitadores (8) de potencia adaptados para generar el término de corrección (ws, cor) para la referencia de frecuencia angular, caracterizado porque los medios limitadores (8) de potencia comprenden unos medios controladores integradores 10 (10) , estando adaptados los medios limitadores (8) de potencia para generar el término de corrección (ws, cor) para la referencia de frecuencia angular usando una señal de salida Ip de los medios controladores integradores (10) , siendo proporcional el término de corrección (ws, cor) para la referencia de frecuencia angular a la señal de salida lp, incluyendo los datos iniciales de los medios controladores integradores (10) una primera variable proporcional al valor real de la potencia del motor eléctrico (2) y un primer parámetro proporcional a un valor límite de la potencia del motor eléctrico (2) , y un cálculo de la señal de salida Ip de los medios controladores integradores (10) comprende restar dicho primer parámetro de dicha primera variable, estando delimitada la señal de salida Ip de los medios controladores integradores (10) de tal manera que siempre sea mayor o igual que cero, y la referencia de frecuencia angular final (w*s) se obtiene restando el término de corrección (w*s, cor) para la referencia de frecuencia angular respecto del valor de punto ajustado limitado (w*s, lim) para la referencia de frecuencia angular.
2. Un sistema de control de un motor según la reivindicación 1, caracterizado porque el sistema de control del motor está adaptado para recibir una referencia de frecuencia angular inicial (w*s0) generada por unos medios de interfaz de usuario, y para generar el valor de punto ajustado limitado (w*s, lim) para la referencia de frecuencia angular basándose en datos iniciales que comprende la referencia de frecuencia angular inicial (w*s0) .
3. Un sistema de control de un motor según la reivindicación 1 o 2, caracterizado porque los medios limitadores (8)
de potencia están adaptados para generar el término de corrección (ws, cor) para la referencia de frecuencia angular con la ecuación 4. Un sistema de control de un motor según cualquier reivindicación precedente, caracterizada porque la primera variable proporcional al valor real de la potencia del motor eléctrico (2) es un valor absoluto de una potencia verdadera estimada ( Pˆ ) del motor eléctrico (2) , y el primer parámetro proporcional al valor límite de la potencia del motor eléctrico (2) es el límite de potencia (Plim) del motor eléctrico (2) .
5. Un sistema de control de un motor según la reivindicación 4, caracterizado porque en un modo de regeneración los datos iniciales de los medios controladores integradores incluyen además información relativa a una potencia ˆ
dinámica ( Pdyn) del motor eléctrico (2) .
ˆ
6. Un sistema de control de un motor según la reivindicación 5, caracterizado porque la potencia dinámica ( Pdyn) del motor eléctrico (2) se calcula con la ecuación en donde J es la inercia del motor eléctrico (2) y p es el número de pares de polos del motor eléctrico (2) .
7. Un sistema de control de un motor según la reivindicación 5 o 6, caracterizado porque en el modo de 40 regeneración la salida Ip de los medios controladores integradores (10) se calcula con la ecuación en donde kip es la ganancia de los medios controladores integradores (10) .
8. Un sistema de control de un motor según una cualquiera de las reivindicaciones 4 a 7, caracterizado 8
porque el límite de potencia (Plim) del motor eléctrico (2) es una función de una variable de frecuencia angular de tal manera que el límite de potencia (Plim) se reduce de forma inversamente proporcional a la variable de frecuencia angular cuando la variable de frecuencia angular excede un punto de frecuencia umbral de elevación (wcp) , siendo la variable de frecuencia angular una variable relacionada con la frecuencia angular del motor eléctrico (2) .
9. Un sistema de control de un motor según la reivindicación 8, caracterizado porque la variable de frecuencia angular es la referencia de frecuencia angular final (w*s) o un valor real de una frecuencia de estator (ws) del motor eléctrico (2) .
10. Un sistema de control de un motor según una cualquiera de las reivindicaciones 2 a 9, caracterizado porque el sistema de control del motor comprende además unos medios limitadores (14) de régimen adaptados para generar un valor de punto ajustado limitado (w*s, lim) para la referencia de frecuencia angular limitando la primera derivada de la señal de entrada de los medios limitadores (14) de régimen.
11. Un sistema de control de un motor según la reivindicación 10, caracterizado porque el sistema de control del motor comprende además unos medios de saturación (12) adaptados para generar una referencia de frecuencia angular saturada (w*s, sat) imponiendo un límite superior (ws0, max) y un límite inferior (ws0, min) a la referencia de frecuencia angular inicial (w*s0) , estando adaptados además los medios de saturación (12) para alimentar la referencia de frecuencia angular inicial saturada (w*s, sat) a los medios limitadores (14) de régimen como la señal de entrada de los medios limitadores (14) de régimen.
12. Un sistema de control de un motor según la reivindicación 11, caracterizado porque los medios limitadores (8) de potencia están adaptados, cuando la señal de salida Ip de los medios controladores integradores (10) es mayor que cero, para asignar al límite superior (ws0, max) para la referencia de frecuencia angular inicial un valor igual al valor absoluto del valor de punto ajustado limitado (w*s, lim) para la referencia de frecuencia angular, y cuando la señal de salida Ip de los medios controladores integradores (10) es cero, para asignar al límite superior (ws0, max) para la referencia de frecuencia angular una frecuencia angular máxima predeterminada (ws, max) del motor eléctrico (2) .
13. Un mecanismo de accionamiento de un montacargas que comprende un motor eléctrico (2) , un sistema de control del motor y un miembro de elevación (4) , estando conectado operativamente el motor eléctrico (2) al miembro de elevación (4) para elevar una carga (6) , caracterizado porque el sistema de control del motor incluye un sistema de control de motor según cualquiera de las reivindicaciones 1 a 12.
14. Un método para controlar un motor eléctrico de un mecanismo de accionamiento de un montacargas, comprendiendo el método los pasos de:
recibir una referencia de frecuencia angular inicial (w*s0) ;
generar un valor de punto ajustado limitado (w*s, lim) para la referencia de frecuencia angular, que sea de régimen limitado, basándose en datos iniciales que comprenden la referencia de frecuencia angular inicial (w*s0) ;
generar un término de corrección (ws, cor) para la referencia de frecuencia angular usando un control integrador (10) , siendo proporcional el término de corrección (ws, cor) para la referencia de frecuencia angular proporcional a la señal de salida Ip del control integrador, incluyendo los datos iniciales del control integrador (10) una primera variable proporcional al valor real de la potencia del motor eléctrico (2) y un primer parámetro proporcional al valor límite de la potencia del motor eléctrico (2) ;
en donde un cálculo de la señal de salida Ip del control integrador (10) comprende restar dicho primer parámetro de dicha primera variable, delimitándose la señal de salida Ip del control integrador (10) , de tal manera que siempre sea mayor o igual que cero; y generar una referencia de frecuencia angular (w*s) para el control del motor eléctrico (2) restando el término de corrección (ws, cor) para la referencia de frecuencia angular respecto del valor de punto ajustado limitado (w*s, lim) para la referencia de frecuencia angular.
15. Un programa de ordenador para ejecutar el método según la reivindicación 14.
Textracción
Patentes similares o relacionadas:
Circuito hidráulico para motor de desplazamiento variable, del 3 de Junio de 2020, de Manitou Italia S.r.l: Un dispositivo para abastecer y modificar una capacidad cúbica de cilindro de un motor hidráulico, que comprende: un primer conducto para abastecer […]
Procedimiento de aseguramiento de un movimiento de levantamiento de una carga y dispositivo de levantamiento asociado, del 29 de Abril de 2020, de MANITOWOC CRANE GROUP FRANCE: Procedimiento de aseguramiento de un movimiento de levantamiento de una carga acoplada mecánicamente a un gancho de un dispositivo de levantamiento […]
Polipasto de cable, del 8 de Abril de 2019, de KONECRANES GLOBAL CORPORATION: Cabrestante que comprende un motor de accionamiento eléctrico , una caja de cambios y un codificador giratorio , en donde el […]
Método de control para un dispositivo de elevación de equilibrio y un dispositivo de equilibrado de elevación, del 19 de Julio de 2017, de Terex MHPS GmbH: Procedimiento de control para un polipasto de equilibrado que comprende un motor de elevación que puede accionarse por medio de un sistema de control […]
Limitador de torsión, del 6 de Julio de 2016, de Liebherr-Components Biberach GmbH: Limitador de torsión para reducir la torsión de un cable , con dos piezas de limitador de torsión (4a, 4b), que pueden girarse la una hacia la otra en la dirección longitudinal […]
Cabrestante, del 20 de Abril de 2016, de Liebherr-Components Biberach GmbH: Cabrestante, en particular cabrestante de un mecanismo de elevación, con un tambor de cable , cuya zona de arrollamiento está delimitada por dos discos […]
 Procedimiento de control de la velocidad de rotación de un motor de un accionamiento de elevación de velocidad controlable y accionamiento de elevación, del 22 de Julio de 2015, de KONECRANES PLC: Un procedimiento de control de una velocidad de rotación de un motor de un accionamiento de elevación de velocidad controlable, en el que el accionamiento de elevación […]
Procedimiento de control de la velocidad de rotación de un motor de un accionamiento de elevación de velocidad controlable y accionamiento de elevación, del 22 de Julio de 2015, de KONECRANES PLC: Un procedimiento de control de una velocidad de rotación de un motor de un accionamiento de elevación de velocidad controlable, en el que el accionamiento de elevación […]
Procedimiento y sistema para la compensación de fuerzas o momentos en una instalación de tiro puntual o instalación de tiros de escena, del 21 de Mayo de 2014, de WAAGNER-BIRO AUSTRIA STAGE SYSTEMS AG: Procedimiento para la compensación de fuerzas o momentos en una instalación de tiro puntual o instalación de tiros de escena o instalación de tiro puntual y tiros […]