SISTEMA DE COMPENSACIÓN DE DESPLAZAMIENTO DEL CENTRO DE GRAVEDAD POR MANIPULACIÓN DE CARGAS PARA SISTEMA AÉREO NO TRIPULADO EQUIPADO CON BRAZO ROBÓTICO.
Sistema de compensación de desplazamiento del centro de gravedad por manipulación de cargas para sistema aéreo no tripulado,
equipado con brazo robótico, que permite manipular cargas, y que incluye un sistema de control capaz de detectar o prever las variaciones del centro de gravedad del sistema realizando un control que aumente la estabilidad y precisión, incluyendo partes móviles para compensar total o parcialmente los desplazamientos del centro de gravedad del sistema provocados por los movimientos del sistema robótico y por las cargas manipuladas.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201330537.
Solicitante: UNIVERSIDAD DE SEVILLA.
Nacionalidad solicitante: España.
Inventor/es: OLLERO BATURONE,ANIBAL, PEREZ MARTINEZ,CARLOS, ESPIN GARCIA,Alvaro, MARTIN SANCHEZ,Jesus, HEREDIA BENOT,Guillermo, CANO BAZAGA,Raul.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64C17/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64C AEROPLANOS; HELICOPTEROS (vehículos de colchón de aire B60V). › B64C 17/00 Estabilización de aeronaves no prevista en otro lugar. › mediante aparatos accionados por gravedad o inercia.
- B64C39/02 B64C […] › B64C 39/00 Aeronaves no previstas en otro lugar. › caracterizadas por un uso especial.
- B64D1/22 B64 […] › B64D EQUIPAMIENTO INTERIOR O ACOPLABLE A AERONAVES; TRAJES DE VUELO; PARACAIDAS; DISPOSICIONES O MONTAJE DE GRUPOS MOTORES O DE TRANSMISIONES DE PROPULSION EN AERONAVES. › B64D 1/00 Lanzamiento, eyección, soltado o recepción de objetos, líquidos o similares, durante el vuelo (en lo que respecta a miras para armamento, F41G tiene prioridad; paracaídas B64D 17/00; asientos eyectables B64D 25/10; cápsulas eyectables B64D 25/12; repostado de combustible en vuelo B64D 39/00; aparatos de lanzamiento para proyectiles o para misiles F41F 1/00, F41F 7/00; lanzadores de cohetes o torpedos F41F 3/00). › Recogida de objetos de la superficie terrestre.
Fragmento de la descripción:
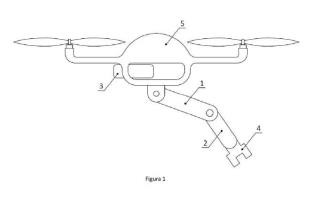
Sistema de compensación de desplazamiento del centro de gravedad por manipulación de cargas para sistema aéreo no tripulado equipado con brazo robótico
OBJETO DE LA INVENCIÓN
La presente invención se refiere a un sistema aéreo no tripulado equipado con un sistema robótico que permite manipular cargas y que incluye un sistema de control capaz de detectar o prever las variaciones del centro de gravedad del sistema realizando un control que aumente la estabilidad y precisión incluyendo partes móviles para compensar total o parcialmente los desplazamientos del centro de gravedad del sistema provocados por los movimientos del sistema robótico y por las cargas manipuladas.
La presente invención se encuadra dentro del sector de la técnica de la aeronáutica y específicamente dentro del sector de la robótica aeronáutica y de los sistemas de control de aeronaves y sistemas aéreos no tripulados.
ESTADO DE LA TÉCNICA
El movimiento y la manipulación de cargas mediante un brazo robótico instalado en un vehículo provoca el desplazamiento del centro de gravedad del vehículo apareciendo momentos de fuerza que pueden impedir la operación o generar inestabilidades que lleguen a provocar el vuelco. Si el brazo manipulador se instala en un vehículo aéreo el problema es más relevante debido a que los mencionados desplazamientos del centro de gravedad y los pares de fuerza generados pueden provocar fácilmente la entrada en pérdida de la aeronave.
La detección, previsión y compensación de este tipo de perturbaciones representa un reto importante a la hora de conseguir dispositivos robóticos móviles y es por ello que existe numerosa bibliografía al respecto, así como un número elevado de patentes que enfocan el problema desde diversas perspectivas.
Existe una vasta bibliografía respecto al problema de manipular cargas con brazos articulados anclados y fijados a una superficie como el suelo o el techo. Para calcular y mitigar o adaptarse
a dichos efectos existen diversas estrategias como el empleo de sensores de fuerza o presión situados entre el dispositivo robótico y la carga, o el control en velocidad teniendo en cuenta los efectos inerciales provocados por la carga manipulada. En las patentes con números de publicación KR20000021209 [1], W08800368 [2], W02009088828 [3] ó US5444612 [4] se encuentran algunos ejemplos de dichas propuestas. Todas estas estrategias, métodos y sistemas son de poca utilidad cuando el dispositivo robótico está montado sobre un vehículo cuyo movimiento puede ser afectado por las masas e inercias del brazo robótico. En [5] se estudian estrategias de control para un brazo robótico móvil situado sobre un vehículo terrestre analizando la interrelación entre dicho brazo y el vehículo, intentando minimizar el error cometido en el posicionamiento.
Se pueden encontrar también múltiples referencias, tanto en patentes como en publicaciones nacionales e internacionales, sobre sistemas destinados a determinar los desplazamientos del centro de gravedad por manipulación de cargas tanto centrados en mostrar algún tipo de alarma como en la determinación precisa para la modificación de la actuación (US20090143896 [6]).Estos trabajos se basan en distintos tipos de sensores, principalmente de fuerza, pero en ningún caso los sistemas son capaces de modificar la configuración para compensar los desplazamientos del centro de gravedad.
En el ámbito de las aplicaciones espaciales se han realizado numerosos trabajos que consideran las interacciones entre el movimiento de brazos manipuladores y los vehículos que los portan ([7][8][9]), y se han presentado diferentes aproximaciones para incluir en el bucle de control los efectos de las partes móviles sobre la dinámica del sistema ([10][11 ][12][13][14]). Todas estas publicaciones, sin embargo, se centran sólo en la modificación de los algoritmos de control para contemplar el movimiento del brazo pero no emplean partes móviles específicamente dedicadas a compensar las fuerzas internas generadas. Además, la aplicación de estos sistemas y estrategias no es directa en ningún caso a los casos de vehículos no orbitales dado que no se ven afectados por la gravedad, un factor fundamental a tener en cuenta en el problema que resuelve la invención aquí presentada.
En el caso de sistemas aéreos, se han encontrado diversas invenciones, algunas incluso utilizadas en sistemas comerciales, para modificar el centro de gravedad. La más conocida consiste en la transferencia de combustible entre los diferentes depósitos de las aeronaves que utilizan, por ejemplo, algunos modelos de Airbus como el A380 o el A340. En la patente
W02009144046 [15] se muestra un método y dispositivo para controlar los modos de vibración verticales, para las dos primeras frecuencias naturales del sistema, cuando un helicóptero transporta una carga mediante un arnés. En la patente US2011084162 [16] se presenta un sistema y estructura que permite redistribuir la carga de manera inteligente cuando parte de ella se dispensa, acomodando el centro de gravedad del sistema aéreo no tripulado a la nueva distribución de cargas de forma que se mantenga en la misma vertical en la que estaría si no se transportase ninguna carga. Dicho sistema sólo es de aplicación a cargas transportadas con un arnés y no para la manipulación de cargas, pudiendo contemplarse solo el caso de realizar entregas parciales de la misma que permitan una reconfiguración del posicionamiento de dicha carga.
No se ha encontrado en la bibliografía previa ninguna invención para la compensación del desplazamiento de centro de gravedad por manipulación de cargas de sistemas aéreos no tripulados como la presentada en la presente patente.
Referencias:
[1]. P. Jong O, J. S. Hoon. "Automatic compensation method of forcé and torque sensor
for gravity weight". Patente KR20000021209
[2] , K. Mitsuo, S. Keiji, I. Takashi. "Robot Control apparatus". Patente W08800368
[3]. H. Jianmin, W. Jianjun, Z. Hui. "Method and apparatus using a forcé sensor to
provide load compensation for a robot". Patente W02009088828
[4] , T. Nobutoshi, N. Ryo, K. Tetsuaki. "Adaptative Pl control system". Patente
US5444612
[5]. N. A. M. Hootsmans and S. Dubowsky. "Large Motion control of mobile manipulators
including vehicle suspensión characteristics" Proceeding of the 1991 IEEE International Conference on Robotics and Automation, Sacramento, CA. 1991
[6]. V. Janardhan, J. K. Berry, B. Mintah, E. G. Brandt, R. J. Price, K. D.King. "Payload
system with center of gravity compensation". Patente US20090143896.
[7]. S. Ali A. Moosavian and E.Papadopoulos. "Free-flying robots in space: an overview of dynamics modeling, planning and control" Robotica (2007) Vol 25, pp 537-547. Cambridge University Press. 2007.
[8]. Z. Vafa and S. Dubowsky. "The kinematics and dynamics of space manipulators: the
virtual manipulator approach" The International Journal of Robotics Research, Vol. 9, No. 4, pp 3-21. 1990
[9]. E. Papadopoulos and S. Dubowsky. "On the nature of control algorithms for space
manipulators" Proc. IEEE Int. Conf. on Robotics and Automation, Cincinnati, OH. 1990
[10]. G. J. Reuter et al. "An Intelligent, free-flying robot, in space station Automation". IV
SPIE Proceedings Series 1006, 20-27. 1995.
[11]. P. K. Khosla and T. Kanade. "Real-time implementation and evaluation of computed
torque scheme" IEEE Trans. Robot. Autom. 5(2), 245-253. 1989.
[12]. S. Chiaverini, L. Sciavicco and B. Siciliano. "Control of robotic Systems through
singularices" Proceedings of the International Workshop on Nonlinear and Adaptative Control Issues in Robotics, Grenoble, France, Nov. 1990. Advanced Robot Control, Lecture notes in Control and Information Sciences 162 (C. Canudas de Wit ed.) Springer-Verlag Berlín, D, pp 285-295 1991
[13]. K. Yoshida. "Impact Dynamics Representation and Control With Extended-Inversed
Inertia Tensor for Space Manipulators" Proceedings of the 6,h International Symposium on robotics Research, Pittsburgh, PA, pp 453-463.1994.
[14] , A. K. Swain and A. S. Morris. "Dynamic control of multi-arm co-operating manipulator
Systems" Robotica 22(3), 271-283. 2004
[15]. B. Hanno, H. Mario. "Method and device for actively damping vertical oscillations in a
helicopter having an attached exterior payload". Patente W02009144046
[16]. G. Emray, G. Katherine. "Autonomous payload parsing management system and
structure for an unmanned aerial vehicle". Patente US2011084162.
El sistema de compensación que se propone con la presente invención tiene principalmente cuatro ventajas frente...
Reivindicaciones:
1. Sistema aéreo no tripulado equipado con brazo mecánico articulado, caracterizado por incluir un dispositivo mecánico que convierte en móvil un elemento para compensar, bien total o bien parcialmente, el desplazamiento del centro de gravedad del sistema al moverse el brazo mecánico articulado.
2. Sistema aéreo no tripulado equipado con brazo mecánico articulado, de acuerdo con la reivindicación 1, en el que la parte móvil es la batería del brazo articulado.
3. Sistema aéreo no tripulado equipado con brazo mecánico articulado de acuerdo con la reivindicación 1 que incluye un dispositivo para el control automático de la posición de la parte móvil, capaz de calcular el desplazamiento necesario para compensar total o parcialmente el desplazamiento del centro de gravedad del sistema al moverse el brazo mecánico.
4. Sistema aéreo no tripulado equipado con un brazo articulado de acuerdo con las reivindicaciones 1 y 3, que además tiene la capacidad de enviar y recibir información hacia y desde el sistema de control de vuelo de la aeronave no tripulada.
5. Sistema aéreo no tripulado equipado con un brazo articulado de acuerdo con las reivindicaciones 1, 3 y 4 que incluye un sistema de control de vuelo capaz de compensar, por la modificación de sus parámetros característicos, la desviación del centro de gravedad propiciado por el movimiento del brazo mecánico, y no compensado por el sistema mecánico de desplazamiento de la batería, o la carga manipulada o los momentos producidos por la actividad realizada con el brazo mecánico mediante la modificación de las actuaciones del sistema aéreo no tripulado.
Patentes similares o relacionadas:
DISPOSITIVO DE PURIFICACIÓN, DESINFECCIÓN Y CONTROL DE LA CALIDAD DEL AIRE Y ENTORNOS MEDIANTE DRON, del 7 de Julio de 2020, de TALESTECH, S.L.U: 1. Dispositivo de purificación, desinfección y control de la calidad del aire y entornos mediante dron (A) con capacidad para efectuar un vuelo […]
Sistema para el diagnóstico de turbinas eólicas de un generador eólico y método de diagnóstico de una turbina eólica, del 2 de Julio de 2020, de UNIVERSIDAD DE CASTILLA-LA MANCHA: Sistema para el diagnóstico de turbinas eólicas de un generador eólico , que comprende un vehículo aéreo no tripulado (UAV) previsto para acercarse a una turbina eólica […]
MÉTODO DE DETECCIÓN DE LÍNEAS DE TRANSMISIÓN DE ENERGÍA EN TIEMPO REAL CON VEHÍCULOS AÉREOS NO TRIPULADOS, del 25 de Junio de 2020, de PONTIFICIA UNIVERSIDAD JAVERIANA: La presente invención se refiere a un método para realizar la detección de líneas de transmisión de energía en una imagen capturada mediante una cámara […]
Sistema y método para ocultar dinámicamente video e imágenes capturadas con una cámara de dispositivo dron, del 10 de Junio de 2020, de HONEYWELL INTERNATIONAL INC.: Un método que comprende: dar instrucciones a un dispositivo dron para que vuele cerca de una potencial área de vigilancia mientras está en […]
Geometría de ala de aeronave de gran altitud, del 10 de Junio de 2020, de Stratospheric Platforms Limited: Una aeronave no tripulada de larga duración de gran altitud que comprende una estructura del ala, un fuselaje y una cola, que opera por encima de 15 […]
Sistemas y métodos para simulación de cardán, del 3 de Junio de 2020, de SZ DJI Technology Co., Ltd: Método de simulación de control de cardán, comprendiendo dicho método: recibir una señal de modo de cardán indicativa de una selección […]
Dron neumático, del 3 de Junio de 2020, de San Jorge Tecnológicas, S.L: Un vehículo volador no tripulado con una o más hélices las cuales están conectadas a uno o más motores neumáticos adaptados para ser accionados por un fluido, caracterizados […]
Dispositivo de protección de Vehículo Aéreo No Tripulado (VANT) frente al impacto y a las altas temperaturas, del 29 de Mayo de 2020, de ARES LAVADO, ALVARO: 1. Dispositivo de protección de vehículo aéreo no tripulado (VANT) frente al impacto y a las altas temperaturas, caracterizado porque presenta: - […]