SISTEMA COMPACTO DE GENERACION Y CONTROL DE MOMENTOS DE FUERZA CON DIRECCION CONSTANTE.
Sistema de actuadores giroscópicos dispuestos de forma que uno de los giróscopos gira dentro de la envolvente de movimiento del otro,
permitiendo una reducción sustancial del volumen necesario para conseguir un momento de fuerza determinado con una dirección constante.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201132118.
Solicitante: FUNDACION ANDALUZA PARA EL DESARROLLO AEROESPACIAL.
Nacionalidad solicitante: España.
Inventor/es: VELA MARTINEZ,JUAN PEDRO, PEREZ MARTINEZ,CARLOS, ESPIN GARCIA,Alvaro, DE LOS SANTOS TRIGO,Silvia.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64G1/28 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64G ASTRONAUTICA; VEHICULOS O EQUIPOS A ESTE EFECTO (aparatos o métodos para obtener materiales de fuentes extraterrestres E21C 51/00). › B64G 1/00 Vehículos espaciales. › que utilizan la inercia o el efecto giroscópico.
- G01C19/06 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 19/00 Giróscopos; Dispositivos sensibles al giro con masas vibratorias; Dispositivos sensibles al giro sin masas móviles; Medida de velocidad angular usando efectos giroscópicos. › Rotores.
- G01C19/08 G01C 19/00 […] › accionados eléctricamente (G01C 19/14 tiene prioridad).
- G05D1/08 G […] › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la actitud, es decir, eliminación o reducción de los efectos del balanceo, cabeceo o guiñada.
Fragmento de la descripción:
Sistema compacto de generación y control de momentos de fuerza con dirección constante.
OBJETO DE LA INVENCIÓN
La presente invención se refiere a un sistema de actuadores giroscópicos dispuestos de forma que uno de los giróscopos gira dentro de la envolvente de movimiento del otro, permitiendo una reducción sustancial del volumen necesario para conseguir un momento de fuerza determinado con una dirección constante.
La presente invención se encuadra dentro del sector de la técnica de los actuadores y específicamente dentro del sector de los actuadores giroscópicos para la obtención de momento de fuerza, siendo su ámbito de aplicación los sectores aeronáutico, espacial, ferroviario, automoción y naval principalmente.
ANTECEDENTES EN EL ESTADO DE LA TÉCNICA
Los actuadores giroscópicos para la obtención de momento de fuerza se desarrollan principalmente en el sector aeroespacial, aunque encuentran ámbito de aplicación en otros sectores como pueden ser el naval, ferroviario o el de automoción, entre otros.
Para la obtención de momentos de fuerza existen dos grandes familias de actuadores giroscópicos: aquellos que obtienen el momento de fuerza mediante la variación del módulo del momento angular de los giróscopos, que incluye las ruedas de reacción, volantes de inercia y otros dispositivos similares, y aquellos que consiguen obtener el momento de fuerza mediante la variación de la dirección de los momentos angulares, compuestos por los denominados CMGs, por las siglas en inglés de giróscopos de control de momento.
La presente invención se encuadra dentro de la familia de los CMGs, cuya principal ventaja frente a la otra familia es la agilidad en la respuesta del sistema, obteniéndose los pares requeridos con un tiempo de respuesta notablemente más corto ya que no es necesario acelerar los giróscopos, sino que éstos se encuentran girando en espín a la velocidad nominal de funcionamiento.
Existe un número considerable de patentes y modelos de utilidad relacionadas con estos sistemas; podemos nombrar a modo de ejemplo las siguientes: US 6648274 B1, US 2008/0223990 A1, FR 98 14548 ó US 0070124032.
Cabe destacar, por su aparente relación con la presenta invención, las patentes US 6360996 B1 y US 5681012 referidas a control de CMGs utilizando la técnica denominada de ‘scissored pairs’, que podría traducirse como ‘pares de tijera’; y la patente española P200102290 referida a un actuador giroscópico formado por anillos concéntricos.
En los dos primeros casos, las patentes hacen referencia a sistemas de control, bien de un conjunto de actuadores, bien de una aeronave o vehículo espacial. La invención “sistema compacto de control de momento” se refiere principalmente a la configuración de los actuadores, así como, a los demás elementos necesarios para realizar el control del sistema, sin incluir un método o algoritmo de control específico más allá de una descripción del principio de funcionamiento, que efectivamente es del tipo “pares de tijera”.
La última de las patentes reseñadas, P200102290, titulada ‘Actuador giroscópico’ sí hace referencia a la forma de construcción de un actuador, pero las diferencias con la presente invención son amplias y obvias. En el caso del ‘Actuador giroscópico’ los rotores del sistema son anillos que están dispuestos concéntricamente. En el caso del sistema compacto de control de momento, los rotores no están limitados en cuanto a su forma, y la posición relativa de los mismos no se encuentra prefijada, tan sólo existe una restricción en cuanto a la relación entre los ejes de rotación en nutación y en espín, que deberán ser paralelos dos a dos, no estando obligadas a ser, ni anillos, ni concéntricos.
La presente invención, respecto a otros sistemas dirigidos a las mismas aplicaciones, presenta la principal ventaja de ocupar menos volumen que los demás sistemas existentes, al incluir dos rotores en un mismo espacio. Éstos otros sistemas necesitarían un volumen mayor para albergar más de un rotor con las mismas características. Así mismo, esta invención mantiene todas las ventajas de los sistemas CMGs frente a la otra familia existente en cuanto a agilidad de respuesta, y todas las ventajas de los sistemas que utilizan el principio de ‘scissored pairs’ frente a los CMGs tradicionales.
EXPLICACIÓN DE LA INVENCIÓN
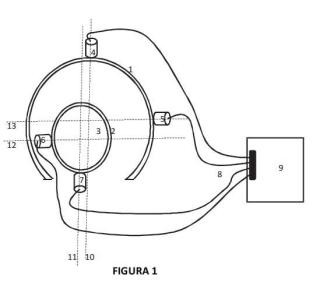
El sistema compacto de generación y control de momentos para generación de momento de fuerza con dirección constante está compuesto fundamentalmente por tres conjuntos de elementos: rotores giroscópicos, motores y electrónica de control.
Los rotores giroscópicos son dos masas que se hacen girar alrededor de un eje en un movimiento que se denomina de espín adquiriendo las características físicas que caracterizan a los giróscopos. Dichos rotores se disponen en una configuración que permite el giro de uno de ellos alrededor del otro; para optimizar y facilitar el sistema, el rotor exterior tendrá una forma ahuecada de manera que el rotor interior quedará parcialmente rodeado por el rotor exterior.
Los motores se encargarán de proveer a los rotores del giro en espín antes mencionado, convirtiéndolos así en giróscopos físicos, y otros motores proporcionarán el giro denominado de nutación a cada giróscopo alrededor de un eje que será perpendicular al de espín en cada rotor, siendo ambos ejes de nutación paralelos entre sí. Si los motores se conectan para realizar una actuación directa sobre los ejes de giro, serán necesarios cuatro motores, uno para cada giro en cada motor, aunque mediante el uso de sistemas mecánicos de engranajes, reductoras y otros dispositivos podría reducirse el número de motores necesarios.
La electrónica será la encargada de realizar el control de movimiento del sistema.
En principio esta electrónica puede estar formada por los “drivers” comerciales de los motores que se incluyan en la invención o formar parte de un sistema de control más complejo.
La invención consigue generar momentos de fuerza por conservación del momento angular de sistemas aislados. Al igual que sucede con los giróscopos con control de momento CMG (por sus siglas en inglés “control moment gyros”) y más concretamente con el principio de funcionamiento conocido como “Twins CMGs” o “Scissored-pair”, sistema compacto de generación y control de momentos, obtiene un momento de fuerza neto con dirección constante por la combinación de momentos de fuerzas generados por cada rotor con dirección variable gracias a la sincronía con la que se generan. A continuación se detalla el modo de funcionamiento.
Para el correcto funcionamiento de la invención, la posición inicial de los rotores debe ser tal, que los ejes de giro en espín sean paralelos y que el momento angular que posean los rotores giroscópicos sea el mismo en módulo pero de sentidos opuestos, con lo que el momento angular resultante del sistema será nulo. Partiendo de esta posición, si se hacen girar los dos rotores alrededor de sus respectivos ejes de nutación, que son paralelos entre sí, en sentidos contrarios y con el mismo módulo de la velocidad angular, el momento angular resultante irá creciendo desde un valor inicial nulo, en una dirección perpendicular al momento angular inicial de los rotores y a los ejes de rotación en nutación hasta alcanzar su valor máximo cuando los rotores generan momentos angulares alineados y en el mismo sentido, esto es, tras un giro en nutación de 90º de cada rotor.
El momento de fuerza generado, que matemáticamente viene dado por la variación del momento angular total respecto al tiempo, si la velocidad en nutación permanece constante, viene determinado por el momento angular de los anillos, la velocidad de nutación y modulado por el coseno del ángulo que forman los momentos angulares de los rotores entre sí en cada momento, siendo su dirección la misma que la del momento angular total del sistema. El momento de fuerza instantáneo alcanzará su máximo valor, si se considera la velocidad angular de nutación constante, en el instante inicial y tendrá un valor que será la suma de los momentos angulares de espín de los rotores multiplicada por la velocidad angular de nutación, mientras que la variación máxima de momento angular capaz de transferir la invención será la suma de dichos momentos angulares de espín.
El sistema propuesto es capaz de generar momentos de fuerza en direcciones de todo el plano perpendicular a los ejes de nutación de los rotores sin más que realizar, antes de empezar el movimiento de nutación de los rotores, un giro...
Reivindicaciones:
1. Sistema compacto de generación y control de momentos de fuerza con dirección constante caracterizado por estar formado por dos rotores giroscópicos con momentos angulares constantes e iguales en módulo dispuestos de tal manera que los ejes de nutación de ambos rotores son paralelos entre ellos, los ejes de espín son perpendiculares en cada rotor al eje de nutación y el rotor exterior puede girar alrededor del interior, siendo el volumen efectivo necesario el determinado por el rotor exterior.
2. Sistema compacto de generación y control de momentos de fuerza con dirección constante de acuerdo con la reivindicación 1, caracterizado porque incluye un sistema electrónico de control que permite el movimiento en nutación de ambos rotores en sentidos opuestos de forma sincronizada para obtener un momento de fuerza de dirección constante.
3. Sistema compacto de generación y control de momentos de fuerza con dirección constante de acuerdo con las reivindicaciones 1 y 2, caracterizado porque ambos rotores pueden girar en nutación en el mismo sentido y de forma sincronizada manteniendo alineados los ejes de espín para variar la dirección en la que se obtiene el momento de fuerza al realizar el giro en nutación de los rotores en sentidos opuestos, permitiendo la obtención de momento de fuerza en cualquier dirección del plano perpendicular al eje de nutación de los rotores.
4. Sistema compacto de generación y control de momentos de fuerza con dirección constante de acuerdo con las
reivindicaciones 1, 2 y 3, caracterizado porque añade un eje de
giro adicional perpendicular al de nutación, permitiendo que los
momentos angulares se orienten a cualquier dirección del
espacio antes de empezar el movimiento de nutación en
5 sentidos opuestos para crear el momento de fuerza de
dirección constante, lo cual permite obtener un momento de
fuerza de dirección constante en cualquier dirección del
espacio.
10 5. Sistema compacto de generación y control de momentos de
fuerza con dirección constante, de acuerdo con las
reivindicaciones 1, 2, 3 y 4, caracterizado porque los ejes de
nutación de los dos sistemas son perpendiculares entre sí de
manera que combinando mediante un sistema de control
15 electrónico los momentos de fuerza generados se puede
conseguir un momento de fuerza de dirección constante en
cualquier dirección del espacio.
F RAR
F R2R
F RºR
Patentes similares o relacionadas:
Procedimiento para amortiguar el movimiento de balanceo de un vehículo acuático, del 11 de Marzo de 2020, de SCHOTTEL GMBH: Procedimiento para amortiguar el movimiento de balanceo de un vehículo acuático alrededor del eje longitudinal (L) del mismo, en el que el vehículo acuático presenta […]
Procedimiento para la compensación del bloqueo de una pala de timón en un timón en forma de X, del 4 de Marzo de 2020, de ThyssenKrupp Marine Systems GmbH: Procedimiento para la compensación del bloqueo de una pala de timón en un timón en forma de X de un submarino, en donde el procedimiento exhibe las siguientes etapas: […]
Guía de aproximación de director de vuelo, del 6 de Noviembre de 2019, de THE BOEING COMPANY: Un método implementado por ordenador para proporcionar guiado durante una maniobra de aproximación de un avión , comprendiendo el método: determinar una […]
Filtro de Kalman modificado para la generación de correcciones de error de actitud, del 5 de Junio de 2019, de THE BOEING COMPANY: Medio de almacenamiento legible por ordenador que comprende instrucciones ejecutables por ordenador que, cuando se ejecutan por un ordenador , provocan que el ordenador: […]
Sistema de formación de imágenes espaciales en tres dimensiones, del 3 de Junio de 2019, de THALES: Sistema de formación de imágenes espaciales en tres dimensiones que comprende: - al menos dos satélites (Sat1, Sat2) en órbita geocéntrica en un mismo […]
 Método y aparato para la detección y gestión de fallos latentes para sistemas de control de vuelo por cable, del 29 de Mayo de 2019, de THE BOEING COMPANY: Sistema de control de aeronave que comprende:
sistemas de control de vuelo de piloto y copiloto (P, A), incluyendo cada uno un primer […]
Método y aparato para la detección y gestión de fallos latentes para sistemas de control de vuelo por cable, del 29 de Mayo de 2019, de THE BOEING COMPANY: Sistema de control de aeronave que comprende:
sistemas de control de vuelo de piloto y copiloto (P, A), incluyendo cada uno un primer […]
Métodos y aparatos de notificación de una asimetría de vuelo que influye en una aeronave, del 15 de Mayo de 2019, de THE BOEING COMPANY: Un método, que comprende: monitorizar una característica de balanceo de una aeronave ; determinar una salida de un sistema de piloto automático […]
Piloto automático de vehículo volador, del 24 de Abril de 2019, de THE BOEING COMPANY: Un metodo implementado por ordenador para controlar un vehiculo volador, que comprende: recibir, por un piloto automatico (218A) del vehiculo […]