SISTEMA DE ASISTENCIA EN LA DIRECCIÓN ELECTROHIDRÁULICA PARA UN VEHÍCULO AUTOMÓVIL.
Sistema de asistencia electrohidráulica de la dirección para un vehículo automóvil que comprende un volante de la dirección (1) solidario en rotación con una columna de la dirección (3) destinada a determinar la orientación de las ruedas directrices (2) del vehículo,
mediante un dispositivo de la dirección con un cilindro hidráulico integrado (5), comprendiendo dicho sistema una bomba de asistencia (8) accionada en su movimiento de rotación mediante un motor eléctrico (9) bajo el mando de un ordenador (10) en función de una señal representativa de la velocidad del vehículo y de una señal representativa de la velocidad de variación del ángulo del volante de la dirección, caracterizado porque el dispositivo generador de la señal representativa de la velocidad de variación del ángulo del volante de la dirección es un ordenador (10) adaptado para establecer mediante un cálculo dicha señal a partir de la corriente del motor (9) de mando de la bomba de asistencia (8)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E04292988.
Solicitante: HYDROPERFECT INTERNATIONAL HPI.
Nacionalidad solicitante: Francia.
Dirección: Z.I., 26 RUE CONDORCET 94430 CHENNEVIERES SUR MARNE FRANCIA.
Inventor/es: Lesther,Nicaise, Caresche,François, Chaigne,Gabriel.
Fecha de Publicación: .
Fecha Solicitud PCT: 14 de Diciembre de 2004.
Clasificación Internacional de Patentes:
- B62D5/065 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 5/00 Dirección asistida o de relé de potencia (para ruedas no orientables B62D 11/00; servomotores de fluido bajo presión en general F15B). › caracterizado por los medios especialmente adaptados para hacer variar la alimentación del fluido a presión, p.ej. según la demanda, por una asistencia variable.
Clasificación PCT:
- B62D5/065 B62D 5/00 […] › caracterizado por los medios especialmente adaptados para hacer variar la alimentación del fluido a presión, p.ej. según la demanda, por una asistencia variable.
Clasificación antigua:
- B62D5/065 B62D 5/00 […] › caracterizado por los medios especialmente adaptados para hacer variar la alimentación del fluido a presión, p.ej. según la demanda, por una asistencia variable.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2362095_T3.pdf
Fragmento de la descripción:
La presente invención se refiere a un sistema de asistencia de la dirección electrohidráulica para un vehículo automóvil que comprende un volante de la dirección solidario en rotación con una columna de la dirección destinada a determinar la orientación de las ruedas directrices del vehículo, por medio de un dispositivo de la dirección con un cilindro hidráulico integrado, comprendiendo dicho sistema una bomba de asistencia accionada en su movimiento de rotación por un motor eléctrico bajo el mando de un ordenador en función de una señal representativa de la velocidad del vehículo y de una señal representativa de la velocidad de variación del ángulo del volante de la dirección.
En los sistemas de dicho tipo, que son conocidos, (por ejemplo a partir del documento DE10319537A1), la señal representativa de la velocidad de variación del ángulo del volante la proporciona un sensor del ángulo. Dichos sistemas conocidos adolecen del inconveniente de que la presencia de dicho sensor hace aumentar el precio de coste del sistema, de una forma notable.
El objetivo de la presente invención es paliar dicho inconveniente.
Para alcanzar dicho objetivo, un sistema de asistencia según la presente invención se caracteriza porque el dispositivo generador de la señal representativa de la velocidad de variación del ángulo del volante de la dirección es un dispositivo adaptado para establecer dicha señal a partir de la corriente del motor de mando de la bomba de asistencia.
Según una característica de la presente invención, la señal citada anteriormente se obtiene a partir de la velocidad de variación del consumo de corriente del motor eléctrico.
La presente invención se comprenderá mejor, y otros objetivos, características, detalles y ventajas de la misma aparecerán más claramente en la descripción explicativa siguiente hecha haciendo referencia a los dibujos esquemáticos anexos que se dan únicamente a título de ejemplo y que ilustran un modo de realización de la presente invención y en los que:
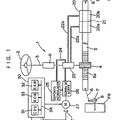
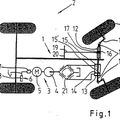
- la figura 1 es un esquema sinóptico de un sistema de asistencia electrohidráulica de la dirección de un vehículo automóvil, según la presente invención;
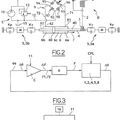
- la figura 2 proporciona el esquema sinóptico del ordenador CA del sistema de asistencia según la figura 1;
- la figura 3 representa, bajo la forma de un esquema de bloques, el proceso de cálculo de la velocidad del volante tal como lo ejecuta el ordenador según la figura 2, y
- la figura 4 ilustra, en forma de unas curvas características, la relación existente entre la velocidad V del vehículo y la velocidad de rotación VM del motor de accionamiento de la bomba del sistema de asistencia así como diferentes niveles de la velocidad VCM de la variación de corriente del motor, indicados en tanto que parámetros.
La figura 1 presenta, bajo la forma de un esquema sinóptico, la estructura general de un sistema de asistencia electrohidráulica de la dirección de un vehículo automóvil. Tal como ilustra la figura, el volante 1 del vehículo permite al conductor de un vehículo determinar la orientación de las ruedas directrices 2 del vehículo mediante la columna de la dirección indicada en 3 y del dispositivo mecánico de la dirección 4 con un cilindro hidráulico integrado 5. Dicho cilindro se controla mediante un grupo electrobomba 7 que comprende sustancialmente una bomba hidráulica 8, un motor 9 de accionamiento de la bomba y un ordenador 10. Este último tiene la función, entre otras, de controlar el motor 9 de modo que la alimentación con energía eléctrica del motor se realiza desde una batería 11, mediante el ordenador 10, tal como se ilustra mediante la línea con flecha 12. La línea con flecha 13 indica que el ordenador 10 recibe mediante un sensor de la velocidad del vehículo, que no se representa específicamente, la información sobre dicha velocidad del vehículo. La línea con flecha 14 simboliza el circuito hidráulico que interconecta el cilindro 5 con la bomba 8.
Puesto que la estructura general descrita anteriormente es ya conocida, no es necesario describirla con un mayor detalle.
Se describirá a continuación, haciendo referencia a la figura 2, lo que concierne específicamente a la presente invención y permite reemplazar el sensor del ángulo que se asocia típicamente al volante 1 y tiene como función enviar al ordenador 10 la información sobre la velocidad angular del volante 1. Puesto que el sistema según la presente invención ya no necesita dicho sensor, la función del mismo únicamente se indica mediante una línea con flecha interrumpida, por otra parte borrada para hacer aparecer claramente la supresión de dicho sensor.
Haciendo referencia a la figura 2, que representa bajo la forma de un esquema sinóptico las diferentes funciones del ordenador 10 en la implementación de la presente invención, se constata que el ordenador comprende unos medios 17 de procesamiento de la corriente CM suministrada por la batería 11, un microprocesador 18 destinado a establecer mediante cálculo, a partir de la señal recibida de los medios de procesamiento 17, la velocidad angular correspondiente del volante y la consigna del motor que se aplicará a continuación al motor 9 tras haberla procesado mediante un circuito 19. Más particularmente, el microprocesador 18 procede a realizar un procesamiento de la información recibida del circuito 17, en 20. Tras dicho procesamiento, el microprocesador 18 realiza en 21 el cálculo de la velocidad angular del volante y en 22 el cálculo de la velocidad de consigna del motor en función de la información sobre la velocidad del vehículo, tal como se representa esquemáticamente mediante la línea con flecha
13.
La figura 3 representa con un mayor detalle el establecimiento del mando a partir de la corriente CM suministrada por la batería.
Tal como representa dicha figura, se hace pasar la corriente Cb primeramente por un filtro paso alto PH designado con la referencia 24, a continuación se calcula en 25 el valor absoluto de la señal de salida del filtro y se procede a un filtrado mediante un filtro estimador designado con la referencia 26 que se realiza bajo la forma de un filtro paso bajo PB. La señal de salida de dicho filtro PB puede aplicarse a un comparador CO con la referencia 27 que recibe en una segunda entrada la señal de salida del filtro paso alto PH. La señal de salida del comparador se transmite mediante un amplificador AM designado con la referencia 29 al borne de salida 30. La señal disponible en dicho borne es representativa de la velocidad angular del volante y constituye, dentro del marco de la figura 2, la señal en la salida del compartimiento 21.
Más particularmente, el filtro paso alto es ventajosamente un filtro del tipo Butterworth o un equivalente al mismo y se utiliza para suprimir la componente de corriente continua. Dicho filtro podría ser un filtro de cuarto orden definido por la fórmula siguiente:
S(n) = A3 x S(n-3) + A2 x S(n-2) + A1 x S(n-1) + B3 x E(n-3) + B2 x E(n-2) + B1 x E(n-1) + B0 x E(n),
Siendo A y B unos coeficientes, E un valor de entrada y n indicando que se trata de la operación de tratamiento en curso realizada por el ordenador, se realiza a unos intervalos predeterminados, por ejemplo cada milisegundo, una operación de lectura del consumo de la corriente del motor y del tratamiento por el microprocesador.
A título de ejemplo, los coeficientes podrían tener los valores siguientes:
A1 = 0,9509253; A2 = 0; A3 = 0; B0 = 0,97546137; B1 = 0,97546137; B2 = 0; B3 = 0;
Dichos coeficientes se memorizarán en una memoria del tipo EEPROM para que puedan ser accesibles y modificables. El filtro paso alto debe tener una ganancia unitaria.
El filtro estimador o paso bajo PB 26 es asimismo preferentemente un filtro del tipo Butterworth o de un tipo equivalente y tiene como función eliminar el ruido de alta frecuencia y crear un efecto de memoria sobre la señal con el objetivo de permitir la creación de un par de retorno del volante que corresponde al par de asistencia que es proporcionado por el sistema.
Dicho filtro puede definirse mediante la expresión siguiente de un filtro de cuarto orden
S(n) = A3 . S(n-3) + A2 . S(n-2) + A1 . S(n-1) + B3 . E(n-3) + B2 . E(n-2) + B1 . E(n-1) + B0 . E(n)
A y B representan de nuevo unos coeficientes que se memorizan ventajosamente en una memoria del tipo EEPROM de tal modo que sean modificables. El filtro tiene una ganancia unitaria.... [Seguir leyendo]
Reivindicaciones:
1. Sistema de asistencia electrohidráulica de la dirección para un vehículo automóvil que comprende un volante de la dirección (1) solidario en rotación con una columna de la dirección (3) destinada a determinar la orientación de las ruedas directrices (2) del vehículo, mediante un dispositivo de la dirección con un cilindro hidráulico integrado (5), comprendiendo dicho sistema una bomba de asistencia (8) accionada en su movimiento de rotación mediante un motor eléctrico (9) bajo el mando de un ordenador (10) en función de una señal representativa de la velocidad del vehículo y de una señal representativa de la velocidad de variación del ángulo del volante de la dirección, caracterizado porque el dispositivo generador de la señal representativa de la velocidad de variación del ángulo del volante de la dirección es un ordenador (10) adaptado para establecer mediante un cálculo dicha señal a partir de la corriente del motor (9) de mando de la bomba de asistencia (8).
2. Sistema según la reivindicación 1, caracterizado porque la señal mencionada anteriormente se obtiene a partir de la velocidad de variación del consumo de corriente del motor eléctrico (9) proporcionada por el ordenador (10).
3. Sistema según la reivindicación 2, caracterizado porque el ordenador (10) se programa para establecer la señal representativa de la velocidad de variación del ángulo del volante de la dirección mediante la aplicación de las funciones de los filtros paso alto y paso bajo a los valores de la corriente del motor.
4. Sistema según la reivindicación 3, caracterizado porque el cálculo realizado por el ordenador (10) implica una función de comparación de las señales de salida del filtro paso alto (24) y del filtro paso bajo (26), siendo la señal de salida la señal más alta de los dos filtros.
5. Sistema según cualquiera de las reivindicaciones 3 a 4, caracterizado porque el cálculo mencionado anteriormente implica la aplicación de una ganancia a la señal del filtro de paso alto (24) que varía en función de la velocidad del vehículo, para modificar la reactividad del sistema.
Patentes similares o relacionadas:
 Método para controlar la dirección de vehículos y el comportamiento de vehículos, del 31 de Julio de 2019, de Sentient IP AB: Un método para controlar uno o más actuadores de dirección en un sistema de dirección en un vehículo que incorpora las siguientes etapas de […]
Método para controlar la dirección de vehículos y el comportamiento de vehículos, del 31 de Julio de 2019, de Sentient IP AB: Un método para controlar uno o más actuadores de dirección en un sistema de dirección en un vehículo que incorpora las siguientes etapas de […]
 Sistema de dirección asistida para un vehículo provisto de un medio para activar la función de parada y arranque de un vehículo en movimiento, en particular un vehículo industrial, comercial o especial, del 10 de Abril de 2013, de IVECO S.P.A.: Sistema de dirección asistida para un vehículo provisto de un medio para activar la función de parada y arranquede un vehículo en movimiento, en particular […]
Sistema de dirección asistida para un vehículo provisto de un medio para activar la función de parada y arranque de un vehículo en movimiento, en particular un vehículo industrial, comercial o especial, del 10 de Abril de 2013, de IVECO S.P.A.: Sistema de dirección asistida para un vehículo provisto de un medio para activar la función de parada y arranquede un vehículo en movimiento, en particular […]
 CIRCUITO HIDRÁULICO DE ACCIONAMIENTO DE DIRECCIÓN ASISTIDA Y VEHÍCULO AUTOMÓVIL PROVISTO DEL MISMO, del 23 de Marzo de 2011, de RENAULT S.A.S.: Circuito hidráulico de accionamiento de dirección asistida para un vehículo automóvil, circuito (C) que incluye al menos una entrada de mando de dirección y al menos […]
CIRCUITO HIDRÁULICO DE ACCIONAMIENTO DE DIRECCIÓN ASISTIDA Y VEHÍCULO AUTOMÓVIL PROVISTO DEL MISMO, del 23 de Marzo de 2011, de RENAULT S.A.S.: Circuito hidráulico de accionamiento de dirección asistida para un vehículo automóvil, circuito (C) que incluye al menos una entrada de mando de dirección y al menos […]
APARATO DE DIRECCION ASISTIDA., del 16 de Diciembre de 2003, de KOYO SEIKO CO., LTD.: La invención se refiere a un aparato de dirección asistida adaptado para generar una fuera de asistencia de dirección por una presión hidráulica de una bomba […]
 SISTEMA DE DIRECCION ASISTIDA, del 8 de Junio de 2009, de KAYABA INDUSTRY CO., LTD.: Un sistema de dirección asistida, que comprende: una válvula de la dirección para controlar un cilindro mecánico o de trabajo ; un orificio variable (a) provisto […]
SISTEMA DE DIRECCION ASISTIDA, del 8 de Junio de 2009, de KAYABA INDUSTRY CO., LTD.: Un sistema de dirección asistida, que comprende: una válvula de la dirección para controlar un cilindro mecánico o de trabajo ; un orificio variable (a) provisto […]
 SISTEMA DE DIRECCION ASISTIDA, del 16 de Mayo de 2008, de JTEKT CORPORATION: Un aparato de dirección asistida para generar una fuerza de asistencia a la dirección mediante una presión hidráulica generada por una bomba accionada […]
SISTEMA DE DIRECCION ASISTIDA, del 16 de Mayo de 2008, de JTEKT CORPORATION: Un aparato de dirección asistida para generar una fuerza de asistencia a la dirección mediante una presión hidráulica generada por una bomba accionada […]
 SISTEMA DE SERVODIRECCION, del 16 de Octubre de 2007, de KAYABA INDUSTRY CO., LTD.: Sistema de servo dirección en un vehículo provisto de una sección de salida de la servo dirección que servo asiste en el funcionamiento de la dirección de un volante de […]
SISTEMA DE SERVODIRECCION, del 16 de Octubre de 2007, de KAYABA INDUSTRY CO., LTD.: Sistema de servo dirección en un vehículo provisto de una sección de salida de la servo dirección que servo asiste en el funcionamiento de la dirección de un volante de […]
 DIRECCION ASISTIDA ELECTROHIDRAULICA, del 16 de Agosto de 2007, de ZF LENKSYSTEME GMBH: Dirección asistida electrohidráulica para un vehículo , con una unidad de suministro de presión que consta de una bomba hidráulica […]
DIRECCION ASISTIDA ELECTROHIDRAULICA, del 16 de Agosto de 2007, de ZF LENKSYSTEME GMBH: Dirección asistida electrohidráulica para un vehículo , con una unidad de suministro de presión que consta de una bomba hidráulica […]