Sensor optoelectrónico.
Sensor optoelectrónico (10) con un emisor de luz (12) y un receptor de luz (36) para formar la imagen de un objeto(52) que presenta un gran número de píxeles dispuestos formando una fila o una matriz y delante del cual estádispuesta una óptica de recepción entocéntrica (24,
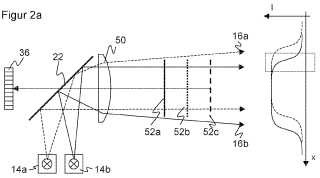
32, 34), estando previstos un dispositivo (42) de medición dedistancia para determinar una distancia entre el sensor (10) y un objeto (52) y una unidad (44) de corrección de laescala de formación de imagen, por medio de la cual se puede corregir la escala de formación de imagen del objeto(52) en función de la distancia, caracterizado porque el sensor de luz (12) presenta al menos una primera fuente deluz (14a) y una segunda fuente de luz (14b), cuyas zonas de iluminación se solapan parcialmente, de modo que enel objeto (52) se produce una zona de iluminación común con diferencias de intensidad dependientes del lugar,porque está dispuesta delante del emisor de luz una óptica de emisión anamorfótica común (20, 24) para todas lasfuentes de luz (14a-b) a fin de generar una iluminación lineal con la luz (16) de las fuentes de luz (14), y porque eldispositivo (42) de medición de distancia está concebido para determinar la distancia a partir de las diferencias deintensidad.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11184688.
Solicitante: SICK AG.
Nacionalidad solicitante: Alemania.
Dirección: ERWIN-SICK-STRASSE 1 79183 WALDKIRCH ALEMANIA.
Inventor/es: RUSS,THOMAS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01B11/02 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › para la medida de la longitud, la anchura o el espesor (G01B 11/08 tiene prioridad).
- G01C3/08 G01 […] › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 3/00 Medida de distancias en línea de vista; Telémetros ópticos (cintas, cadenas o ruedas para la medida de la longitud G01B 3/00; sistemas de triangulación activos, p. ej. que utilizan la transmisión y reflexión de ondas electromagnéticas que no sean ondas de radio, G01S 17/48). › Utilización de detectores de radiación eléctricos.
PDF original: ES-2399204_T3.pdf
Fragmento de la descripción:
Sensor optoelectrónico.
La invención concierne a un sensor optoelectrónico con un emisor de luz y un receptor de luz para formar la imagen de un objeto, así como a un procedimiento para formar la imagen de un objeto con una escala fiel de formación de imagen, según el preámbulo de las reivindicaciones 1 y 11, respectivamente.
Los sensores basados en cámaras emplean sensores de imagen con un gran número de píxeles dispuestos formando una fila o una matriz. Con una ayuda de una iluminación integrada se ilumina la zona del objeto y, según el sensor y la aplicación, se toma y se evalúa una imagen plana bidimensional o una imagen de forma lineal. Se reconocen así, por ejemplo, objetos o cantos o se acota su geometría.
En sensores de cámara está muy extendido el uso de objetivos entocéntricos. Al igual que en el ojo humano, se modifica aquí la escala de formación de imagen de los objetos con la distancia de éstos. Por consiguiente, un objeto lejano aparece en el sensor de imagen como más pequeño que un objeto cercano de dimensiones idénticas. Por este motivo, si se quiere acotar objetos con un sensor de cámara de esta clase, hay que cuidar entonces exactamente de mantenerlos a una distancia prefijada, el rango de exploración nominal. Se han establecido así unas fuertes condiciones marco que restringen considerablemente la flexibilidad de sensores de cámara en tales aplicaciones de acotado.
Es conocido el recurso de emplear, en lugar de un objetivo entocéntrico, un objetivo telecéntrico por el lado del objeto. Éste tiene la propiedad de que no se presentan diferencias de tamaño en perspectiva, es decir que la escala de formación de imagen no se modifica con la distancia del objeto. El objetivo telecéntrico proporciona entonces un intervalo de tolerancia en torno al rango de exploración nominal dentro del limitado intervalo de profundidad de nitidez. Sin embargo, los objetivos telecéntricos necesitan una longitud de construcción muy grande del sensor y tienen solamente una pequeña transmisión de intensidad.
A causa de los inconvenientes citados de la formación de imagen telecéntrica, el documento EP 1 13678781 elige el camino de utilizar un objetivo entocéntrico y corregir en una evaluación posterior la escala de formación de imagen en función de la distancia del objeto. Se tiene que medir para ello la distancia del objeto. Por este motivo, en el sensor según el documento EP 1 13678781 está dispuesto en ángulo con el sensor de imagen un emisor de luz adicional que genera un rayo luminoso de compensación con cuya ayuda se triangula la distancia del objeto. Sin embargo, el emisor de luz adicional requiere un espacio de montaje adicional que, a causa de la disposición de triangulación, conduce a un sensor netamente agrandado.
Aparte de la triangulación empleada en el documento EP 1 136 787 81, se conocen en el estado de la técnica diferentes procedimientos para la medición de distancias. Entre éstos se cuentan procedimientos de tiempo de propagación de luz y procedimientos de corte de la luz basados en impulsos o en fases. El documento DE 103 01 094 A 1 describe un dispositivo para la medición bidimensional de distancias con una cámara de toma de imágenes. Para la iluminación se han previsto una fuente de luz primaria y una fuente de luz secundaria, cuyas haces luminosos se eligen deliberadamente diferentes, por ejemplo uno divergente y el otro convergente. La distancia del objeto se deduce entonces de las diferencias de la intensidad de iluminación cuando se ilumina con tan solo una respectiva fuente de luz. Debido a las fuentes de luz enfocadas de maneras diferentes se originan diferentes densidades de energía en casi toda la zona de vigilancia, con lo que se pueden determinar informaciones de distancia en todos los lugares. Sin embargo, la iluminación del documento DE 103 01 094 A 1 logra tan solo una densidad de energía relativamente pequeña con un alcance correspondientemente pequeño y una alta sensibilidad al ruido.
Se conoce por el documento EP O 419 082 A2 un dispositivo de medición óptico que determina la distancia de un objeto con ayuda de diferencias de intensidad. Mediante diferencias en dos fuentes de luz se logran en diversas formas de realización diferentes intensidades dependientes de la distancia: mediante una iluminación puntiforme y una iluminación superficial o mediante distancias diferentes, ángulos de apertura diferentes o longitudes de onda diferentes.
El documento DE 42 38 891 A 1 revela un sistema de cámara con un dispositivo telemétrico integrado. En este caso, se acopla un rayo de medición a través de un grupo constructivo óptico especial a lo largo del eje óptico de la cámara, y por medio de un diodo lateralmente montado, sensible a la posición, se triangula la distancia del objeto a partir del rayo de medición.
Por tanto, el problema de la invención consiste en encontrar un sensor más sencillo, basado en una cámara, con escala fiel de formación de imagen y objetivo entocéntrico.
Este problema se resuelve por medio de un sensor optoelectrónico con un emisor de luz y un receptor de luz para registrar primero datos de imagen por medio de una óptica de recepción entocéntrica con escala de formación de imagen dependientes de la distancia y corregir a continuación la escala de formación de imagen con ayuda de la distancia medida del objeto. Para la determinación de la distancia se emplea aquí la iluminación activa existente del sensor. Ésta genera por medio de varias fuentes de luz una iluminación estructurada, y a partir de las diferencias de intensidad al iluminar con fuentes de luz diferente se deduce la distancia del objeto.
La invención tiene la ventaja de que no es necesaria ninguna óptica costosa, tal como una óptica telecéntrica. La iluminación prevista de todos modos sirve al mismo tiempo para la medición de la distancia. Por este motivo, ya no es necesario un rayo luminoso de compensación adicional o similar. Esto conduce a un sensor simplificado y de un tamaño de construcción netamente más pequeño. La iluminación estructurada genera deliberadamente una alta densidad de energía en el lugar de captación de los objetos y, por tanto, una alta eficiencia de energía y una alta sensibilidad del sensor.
Según la invención, delante del emisor de luz está dispuesta una óptica de emisión anamorfótica para generar una iluminación lineal con la luz de las fuentes de luz. Por consiguiente, esta óptica de emisión es una óptica de emisión común para todas las fuentes de luz, con lo que su rayo luminoso es conformado de la misma manera. Una óptica anamorfótica forma en un eje una imagen distinta de la del otro eje, a cuyo fin, por ejemplo, en un eje no tiene lugar ninguna modificación y en el otro eje se produce una compresión. Se origina así una mancha luminosa alargada que puede ser conformada adicionalmente como una línea por medio de un diafragma de hendidura. Sin embargo, debido al solapamiento tan solo parcial de las fuentes de luz se conservan entonces diferencias de intensidad locales. La óptica anamorfótica presenta, por ejemplo, una o varias lentes cilíndricas para la generación de una línea. Preferiblemente, se combina tal iluminación con una cámara lineal, es decir, una cámara en la que los píxeles del receptor de luz están dispuestos formando una fila o al menos una matriz alargada.
La óptica de recepción presenta preferiblemente una óptica anamorfótica. Ésta es la contra pieza con respecto a una óptica correspondiente del lado de emisión para formar la imagen de los objetos sobre un receptor de luz o un sensor de imagen de forma lineal. La óptica de recepción se puede materializar también, por ejemplo, con una o varias lentes cilíndricas.
Preferiblemente, está previsto un divisor de radiación de modo que al menos una lente cilíndrica pueda ser utilizada conjuntamente por el emisor de luz y el receptor de luz. El divisor de radiación dobla aquí el eje óptico del emisor de luz o del receptor de luz de modo que los dos ejes ópticas coincidan delante del divisor de radiación en el eje óptico común del sensor. Se utilizan así elementos ópticos en la ruta común tanto por el lado de emisión como por el lado de recepción, mientras que los posibles elementos individuales adicionales situados detrás del divisor de radiación pueden proporcionar diferentes propiedades ópticas en la ruta de emisión y de recepción.
El canal de recepción se pliega preferiblemente por medio de un elemento de espejo. Se quiere dar a entender con esto que el eje óptico del receptor de luz se dobla en el elemento de espejo, con lo que el receptor de luz puede ser orientado transversalmente al eje principal del sensor y se hace posible... [Seguir leyendo]
Reivindicaciones:
1. Sensor optoelectrónico (10) con un emisor de luz (12) y un receptor de luz (36) para formar la imagen de un objeto
(52) que presenta un gran número de píxeles dispuestos formando una fila o una matriz y delante del cual está dispuesta una óptica de recepción entocéntrica (24, 32, 34) , estando previstos un dispositivo (42) de medición de distancia para determinar una distancia entre el sensor (10) y un objeto (52) y una unidad (44) de corrección de la escala de formación de imagen, por medio de la cual se puede corregir la escala de formación de imagen del objeto
(52) en función de la distancia, caracterizado porque el sensor de luz (12) presenta al menos una primera fuente de luz (14a) y una segunda fuente de luz (14b) , cuyas zonas de iluminación se solapan parcialmente, de modo que en el objeto (52) se produce una zona de iluminación común con diferencias de intensidad dependientes del lugar, porque está dispuesta delante del emisor de luz una óptica de emisión anamorfótica común (20, 24) para todas las fuentes de luz (14a-b) a fin de generar una iluminación lineal con la luz (16) de las fuentes de luz (14) , y porque el dispositivo (42) de medición de distancia está concebido para determinar la distancia a partir de las diferencias de intensidad.
2. Sensor (10) según la reivindicación 1, en el que la óptica de emisión anamorfótica (20, 24) presenta una o más lentes cilíndricas.
3. Sensor (10) según cualquiera de las reivindicaciones anteriores, en el que la óptica de recepción (24, 32, 34) presenta una óptica anamorfótica, especialmente con una o más lentes cilíndricas.
4. Sensor (10) según las reivindicaciones 2 y 3, en el que está previsto un divisor de radiación (22) de modo que al menos una lente cilíndrica (24) puede ser utilizada conjuntamente por el emisor de luz (12) y el receptor de luz (36) .
5. Sensor (10) según cualquiera de las reivindicaciones anteriores, en el que el canal de recepción es plegado por medio de un elemento de espejo (38) .
6. Sensor (10) según cualquiera de las reivindicaciones anteriores, en el que los ejes ópticos de las fuentes de luz (14a-b) están decalados con respecto al eje óptico del sensor (10) .
7. Sensor (10) según cualquiera de las reivindicaciones anteriores, en el que la unidad (44) de corrección de la escala de formación de imagen está concebido para emplear como referencia la escala de formación de imagen de un rango de exploración nominal y para realizar correcciones de la escala de formación de imagen con ayuda de una desviación entre la distancia y el rango de exploración nominal, estando depositadas las correcciones especialmente en una memoria (46) y/o siendo éstas aprendidas antes de la operación de medición.
8. Sensor (10) según cualquiera de las reivindicaciones anteriores, en el que el dispositivo (42) de medición de distancia está concebido para determinar la respectiva intensidad de la zona de iluminación durante una activación temporalmente decalada de una respectiva fuente de luz (14a-b) .
9. Sensor (10) según cualquiera de las reivindicaciones anteriores, en el que el dispositivo (42) de medición de distancia está concebido para determinar la distancia a partir del cociente de la intensidad de iluminación de la primera fuente de luz (14a) y la intensidad de iluminación de la segunda fuente de iluminación (14b) .
10. Sensor (10) según cualquiera de las reivindicaciones anteriores, en el que están almacenadas en el dispositivo
(42) de medición de distancia unas curvas características (56) del cociente en función del lugar sobre el receptor de luz (36) para diferentes distancias de objeto y en el que se efectúa la determinación de la distancia con ayuda de una comparación de las curvas características (56) y el cociente medido, estando limitada la comparación especialmente a una zona de transición (54) del receptor de luz (36) en la que disminuye la intensidad de al menos una fuente de luz (14a-b) .
11. Procedimiento para formar la imagen de un objeto (52) con una escala fiel de formación de imagen, en el que se ilumina el objeto y se forma la imagen del mismo sobre un receptor de luz, con un gran número de píxeles dispuestos formando una fila o una matriz, por medio de una óptica de recepción entocéntrica (24, 32, 34) , se determina la distancia al objeto (52) y se corrige la escala de formación de imagen del objeto (52) en función de la distancia, caracterizado porque se ilumina el objeto desde al menos una primera fuente de luz (14a) y una segunda fuente de luz (14b) , cuyas zonas de iluminación se solapan parcialmente, de modo que se obtiene sobre el objeto (52) una zona de iluminación común con diferencias de intensidad dependientes del lugar, porque una óptica de emisión anamorfótica común (20, 24) para todas las fuentes de luz (14a-b) genera una iluminación lineal a partir de
Figura 1 10
Figura 2a t
I
\ # I I I I I I I I
, I
I , 16b
I , I '
14a~
56b
Figura 2b 6a r 560
:~~
¡ I J• I
..•. ,
x
Patentes similares o relacionadas:
Generador de imágenes y telémetro combinados, del 12 de Febrero de 2020, de Rafael Advanced Defense Systems Ltd: Un vehículo que comprende un generador de imágenes y un telémetro combinados (10A, 10B) que se montan en el vehículo, el generador de imágenes […]
Sistema de referencia de posición y método para posicionar y seguir uno o más objetos, del 1 de Mayo de 2019, de KONGSBERG SEATEX AS: Método para posicionar y seguir uno o más objetos por medio de una unidad de transceptor fijada a una plataforma del sensor, tal como un objeto o embarcación, y uno […]
MEDIDOR ELECTROÓPTICO INTEGRAL PARA LA MEDICIÓN DE DISTANCIAS DE USO AUTOMOTRIZ, del 20 de Septiembre de 2018, de REMBERG BUENO, Ernst Albert: El dispositivo objeto de la presente invención es un medidor de distancias electroóptico que funciona haciendo rebotar en un blanco u objetivo […]
Técnicas para posicionar un vehículo, del 8 de Noviembre de 2017, de KONECRANES GLOBAL CORPORATION: Un sistema para determinar una ubicación (x_v, y_v) de un vehículo en un entorno provisto de una pluralidad de puntos de referencia (11, 11') cuya […]
Dispositivo para la medición óptica de la distancia, del 2 de Noviembre de 2016, de ROBERT BOSCH GMBH: Dispositivo de medición para la medición óptica de la distancia, particularmente, dispositivo de medición manual, que comprende: un dispositivo de emisión […]
Jalón de prismas reflectores inclinado y procedimiento de uso, del 10 de Junio de 2016, de UNIVERSIDAD DE SEVILLA: Jalón de prismas reflectores inclinado y procedimiento de uso, de aplicación en topografía que permite la medición de puntos no visibles, ni su vertical, […]
Sistema para medir la posición o posiciones temporales de tránsito de pulsos en datos en el dominio del tiempo, del 27 de Abril de 2016, de PICOMETRIX, LLC: Un sistema para interpretar una forma de onda de terahercios (THz), comprendiendo el sistema un transmisor de THz configurado para emitir […]
 Método y dispositivo para la determinación de un ángulo de balanceo, del 23 de Diciembre de 2015, de BAE SYSTEMS BOFORS AB: Método para la determinación del ángulo de balanceo de un cuerpo giratorio a modo de proyectil utilizando sensores para la detección de señales […]
Método y dispositivo para la determinación de un ángulo de balanceo, del 23 de Diciembre de 2015, de BAE SYSTEMS BOFORS AB: Método para la determinación del ángulo de balanceo de un cuerpo giratorio a modo de proyectil utilizando sensores para la detección de señales […]