Sensor óptico.
Sensor óptico para la detección de objetos en un área de cobertura con por lo menos un emisor que emite haces de luz de emisión,
por lo menos un receptor que recibe haces de luz de recepción y una unidad de valoración, en la cual se genera una señal de comprobación del objeto mediante la valoración de las señales de recepción del receptor, caracterizado porque al emisor (10), que es por lo menos uno, para la formación de los haces de luz de emisión se le adjudica por lo menos un objeto óptico con por lo menos una superficie límite diseñada como superficie de forma libre (14, 15), donde la geometría de la superficie de forma libre (14, 15) se deriva en forma de una ecuación diferencial a partir de la distribución de luminosidad que se debe obtener en el plano del área de cobertura.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2007/006593.
Solicitante: LEUZE ELECTRONIC GMBH + CO KG.
Nacionalidad solicitante: Alemania.
Dirección: IN DER BRAIKE 1 73277 OWEN/TECK ALEMANIA.
Inventor/es: DROEMER,JÖRG.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S17/02 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio (G01S 17/66 tiene prioridad).
- G01S7/481 G01S […] › G01S 7/00 Detalles de sistemas según los grupos G01S 13/00, G01S 15/00, G01S 17/00. › Características constructivas, p. ej. disposiciones de elementos ópticos.
- G01V8/20 G01 […] › G01V GEOFISICA; MEDIDA DE LA GRAVITACION; DETECCION DE MASAS U OBJETOS; MARCAS O ETIQUETAS DE IDENTIFICACION (medios para indicar dónde se encuentran personas sepultadas accidentalmente, p. ej. por la nieve A63B 29/02). › G01V 8/00 Prospección o detección por medios ópticos. › utilizando múltiples emisores o receptores.
- G02B3/02 G […] › G02 OPTICA. › G02B ELEMENTOS, SISTEMAS O APARATOS OPTICOS (G02F tiene prioridad; elementos ópticos especialmente adaptados para ser utilizados en los dispositivos o sistemas de iluminación F21V 1/00 - F21V 13/00; instrumentos de medida, ver la subclase correspondiente de G01, p. ej. telémetros ópticos G01C; ensayos de los elementos, sistemas o aparatos ópticos G01M 11/00; gafas G02C; aparatos o disposiciones para tomar fotografías, para proyectarlas o para verlas G03B; lentes acústicas G10K 11/30; "óptica" electrónica e iónica H01J; "óptica" de rayos X H01J, H05G 1/00; elementos ópticos combinados estructuralmente con tubos de descarga eléctrica H01J 5/16, H01J 29/89, H01J 37/22; "óptica" de microondas H01Q; combinación de elementos ópticos con receptores de televisión H04N 5/72; sistemas o disposiciones ópticas en los sistemas de televisión en colores H04N 9/00; disposiciones para la calefacción especialmente adaptadas a superficies transparentes o reflectoras H05B 3/84). › G02B 3/00 Lentes simples o compuestas (ojos artificiales A61F 2/14; cristales de gafas o lentes de contacto para los ojos G02C; cristales de reloj o de péndulo G04B 39/00). › de superficies no esféricas (G02B 3/10 tiene prioridad).
PDF original: ES-2390603_T3.pdf
Fragmento de la descripción:
Sensor óptico.
La presente invención se refiere a un sensor óptico acorde al concepto general de la reivindicación 1.
Los sensores ópticos de ese tipo pueden estar diseñados, sobre todo, como detectores de puntos luminosos, por medio de los cuales se detectan objetos en un área de cobertura. Los sensores ópticos de ese tipo presentan típicamente un emisor que genera un haz de luz de emisión y receptor que capta un haz de luz de recepción. Allí, una óptica de emisión para la formación de los haces de luz de emisión está ubicada detrás del emisor y una óptica de recepción está ubicada antes del receptor, por medio de la cual se focalizan en el receptor los haces de luz receptora reflejados por un objeto. La óptica de emisión y la de recepción están compuestas, cada una, por lentes que típicamente presentan superficies límite con simetría rotacional. Un sensor de ese tipo se conoce por la solicitud DE 42 38 116 A1.
Además, los sensores mencionados también pueden estar diseñados como sensores que procesan imágenes. Los sensores de ese tipo presentan como cámara una disposición de receptores lineal o en forma de matriz. Además, esos sensores pueden tener una unidad de iluminación que está compuesta típicamente por una disposición múltiple de emisores. Un sensor de ese tipo se conoce por la solicitud DE 100 12 522 A1.
La solicitud 20 2005 011 847 U1 se refiere a un sensor óptico para la detección de objetos en un área de control con por lo menos un emisor que emite un haz de luz de emisión, por lo menos un receptor que recibe un haz de luz de recepción y una unidad de valoración para la generación de una señal de comprobación del objeto dependiendo de las señales de recepción que se encuentren pendientes en la salida del receptor. El sensor comprende un elemento óptico que está compuesto por una pieza de plástico moldeada por inyección, donde por lo menos un primer y un segundo segmento del elemento óptico forman por lo menos una lente concéntrica de Fresnel para la formación del haz de luz de emisión y/o del haz de luz de recepción.
La solicitud EP 1 666 913 A2 se refiere a un sensor óptico para la detección de objetos en un área de control con un emisor que genera un haz de luz de emisión y un receptor que recibe un haz de luz de recepción, donde los haces de luz de emisión y los haces de luz de recepción son conducidos a través de una unidad deflectora y pasan por una ventana de salida en una pared frontal de una carcasa. Además, el sensor óptico presenta una unidad de valoración, en la cual, dependiendo de la señal de recepción a la salida del receptor, se genera una señal de comprobación del objeto. La unidad deflectora presenta un espejo de desviación giratorio, cuya superficie especular tiene una comba prefijada para la compensación de distorsiones de la abertura angular de los haces de luz de recepción, las cuales están determinadas por el paso de los haces de luz de recepción a través de la ventana de salida.
La solicitud EP 1 624 322 A1 se refiere a un sensor óptico para el reconocimiento de objetos en un área de control. Está compuesto por un emisor que genera un haz de luz de emisión, un receptor que recibe un haz de luz de recepción y una unidad de valoración para la generación de una señal de comprobación del objeto en dependencia de la señal de recepción a la salida del receptor. El emisor y el receptor están ubicados de forma coaxial y asignados a una óptica de emisión y recepción. El área central de la óptica de emisión y recepción sirve para la colimación de los haces de luz de emisión y el área exterior, para la focalización en el receptor de los haces de luz de recepción. La óptica de emisión y recepción está compuesta por un sustrato de vidrio con una estructura de capas de plástico ubicada encima de éste.
Por la solicitud JP 2006 012203 A se conoce un elemento óptico con una superficie límite diseñada como superficie de forma libre para un receptor que recibe haces de luz de recepción.
La solicitud DE 10 2004 028 471 A1 describe un elemento óptico con una superficie límite diseñada como superficie de forma libre para la formación de haces de luz de emisión.
El objeto de la invención es facilitar un sensor óptico con una funcionalidad aumentada y datos de rendimiento mejorados.
Para lograr este objeto están previstas las características de la reivindicación 1. En las reivindicaciones secundarias se describen formas de realización ventajosas y perfeccionamientos útiles de la invención.
El sensor óptico acorde a la invención sirve para la detección de objetos en un área de cobertura y abarca un emisor que genera un haz de luz de emisión, un receptor que recibe un haz de luz de recepción y una unidad de valoración en la cual, mediante la valoración de las señales de recepción del receptor, se genera una señal de comprobación del objeto. Para la formación de los haces de luz de emisión, al emisor se le adjudica por lo menos un objeto óptico con por lo menos una superficie límite diseñada como superficie de forma libre. La geometría de la superficie de forma libre está derivada, en forma de una ecuación diferencial, de una distribución de la luminosidad que se debe alcanzar en un plano del área de cobertura.
Una ventaja fundamental de la invención es que por medio de los elementos ópticos que presentan superficies límite como superficies de forma libre, la formación de los haces de luz de emisión y sobre todo también de los haces de luz de recepción se puede adaptar de manera exacta a los requerimientos específicos de la aplicación del sensor óptico, con lo cual se mantiene una elevada eficacia del sensor óptico en vistas a la seguridad de detección y a la sensibilidad de comprobación.
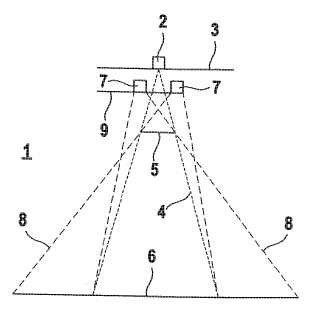
En los elementos ópticos diseñados como ópticas de emisión se puede preestablecer de forma apropiada la iluminación de un área de cobertura tridimensional o plana por medio de un diseño adecuado de la superficie de forma libre, lo cual es una condición fundamental para una detección de objetos en el área de cobertura que sea segura y de alta resolución. Allí se puede obtener, de acuerdo al área de aplicación del sensor óptico, por un lado una iluminación homogénea del área de cobertura, mediante una formación apropiada de las superficies de forma libre. Por otro lado, por medio de un diseño correspondiente de las superficies de forma libre se pueden generar patrones de iluminación preestablecidos dentro del área de cobertura. Con una iluminación no homogénea del área de cobertura se pueden destacar de forma precisa determinadas características de un objeto, para mejorar su capacidad de ser detectado. Además, mediante iluminaciones no homogéneas se pueden generar marcas sobre el recorrido óptico dentro del área de cobertura, que pueden ser registradas por el o los receptores del sensor óptico.
Para los sistemas de iluminación no homogénea son adecuados, sobre todo, los sensores ópticos en forma de detectores de puntos luminosos o, en general, sensores ópticos binarios, que presentan un único emisor y un único receptor. En los sensores ópticos de ese tipo, las señales de recepción del receptor se evalúan típicamente con un valor umbral, con lo cual como señal de comprobación del objeto se genera una señal de conmutación binaria, cuyos estados de conmutación indican si un objeto se encuentra o no en el área de cobertura. Con sensores ópticos como ese se debe reconocer un objeto frente a un fondo, el cual puede estar formado especialmente también por un reflector que limita el área de cobertura. Para poder diferenciar un objeto frente a un fondo, el sensor óptico trabaja con haces de luz de emisión polarizados, de manera que se pueda diferenciar el estado de polarización de la luz de recepción que incide sobre el receptor.
Con el sensor óptico acorde a la invención ya no es necesario el uso de luz polarizada. En vez de eso, para el reconocimiento del objeto se utiliza el patrón de iluminación en forma de marcas ópticas o algo similar generado por medio de la superficie de forma libre del o de los elemento/s óptico/s, sobre todo también para el reconocimiento de objetos con un fondo. Para la obtención del patrón de iluminación, por un lado los haces de luz de emisión pueden explorar el área de cobertura plana por medio de una unidad deflectora. De forma alternativa, el sensor óptico puede presentar una disposición del receptor de resolución local compuesta por una disposición... [Seguir leyendo]
Reivindicaciones:
1. Sensor óptico para la detección de objetos en un área de cobertura con por lo menos un emisor que emite haces de luz de emisión, por lo menos un receptor que recibe haces de luz de recepción y una unidad de valoración, en la cual se genera una señal de comprobación del objeto mediante la valoración de las señales de recepción del receptor, caracterizado porque al emisor (10) , que es por lo menos uno, para la formación de los haces de luz de emisión se le adjudica por lo menos un objeto óptico con por lo menos una superficie límite diseñada como superficie de forma libre (14, 15) , donde la geometría de la superficie de forma libre (14, 15) se deriva en forma de una ecuación diferencial a partir de la distribución de luminosidad que se debe obtener en el plano del área de cobertura.
2. Sensor óptico acorde a la reivindicación 1, caracterizado porque al receptor, que es por lo menos uno, para la formación de los haces de luz de recepción se le adjudica un objeto óptico con por lo menos una superficie de forma libre.
3. Sensor óptico acorde a la reivindicación 2, caracterizado porque los haces de luz de emisión y/o los haces de luz de recepción se reflejan en la superficie límite del elemento óptico.
4. Sensor óptico acorde a la reivindicación 3, caracterizado porque elemento óptico forma un elemento especular.
5. Sensor óptico acorde a la reivindicación 2, caracterizado porque los haces de luz de emisión y/o los haces de luz de recepción atraviesan el elemento óptico.
6. Sensor óptico acorde a la reivindicación 5, caracterizado porque el elemento óptico es una lente.
7. Sensor óptico acorde a una de las reivindicaciones 1 a 6, caracterizado porque el elemento óptico presenta varias superficies límite diseñadas como superficies de forma libre (14, 15) .
8. Sensor óptico acorde a una de las reivindicaciones 1 a 7, caracterizado porque el elemento óptico es una pieza de plástico moldeada por inyección.
9. Sensor óptico acorde a una de las reivindicaciones 1 a 8, caracterizado porque por medio del elemento óptico se generan haces de luz de emisión para la iluminación homogénea del área de cobertura.
10. Sensor óptico acorde a una de las reivindicaciones 1 a 9, caracterizado porque por medio del elemento óptico se emiten haces de luz de emisión para la generación de un patrón de iluminación preestablecido.
11. Sensor óptico acorde a una de las reivindicaciones 9 ó 10, caracterizado porque el área de cobertura está formada por un área espacial.
12. Sensor óptico acorde a una de las reivindicaciones 9 ó 10, caracterizado porque el área de cobertura está formada por una superficie.
13. Sensor óptico acorde a una de las reivindicaciones 1 a 12, caracterizado porque es un detector de puntos luminosos.
14. Sensor óptico acorde a una de las reivindicaciones 1 a 12, caracterizado porque es un sensor que procesa imágenes.
15. Sensor óptico acorde a la reivindicación 14, caracterizado porque presenta una disposición del receptor lineal o en forma de matriz.
16. Sensor óptico acorde a una de las reivindicaciones 14 ó 15, caracterizado porque en éste la ubicación de los emisores (10) forma una unidad de iluminación.
17. Sensor óptico acorde a la reivindicación 16, caracterizado porque a cada sensor (10) se le adjudica un elemento óptico con una superficie límite diseñada como superficie de forma libre (14, 15) .
18. Sensor óptico acorde a una de las reivindicaciones 16 ó 17, caracterizado porque cada sensor (10) presenta un chip LED (16) , que está ubicado en una carcasa (17) del emisor (10) , donde sobre la carcasa (17) se encuentra una lente de captación.
19. Sensor óptico acorde a la reivindicación 18, caracterizado porque la lente de captación (11) está unida con la carcasa (17) por medio de un adhesivo de inmersión.
Patentes similares o relacionadas:
Sistema y método de medición de coordenadas, del 15 de Julio de 2020, de NPL Management Limited: Un sistema de deteccion de posicion para detectar la posicion tridimensional de una pluralidad de objetivos , que incluye: una pluralidad de objetivos […]
Método de medición de una distancia, del 17 de Junio de 2020, de The Chugoku Electric Power Co., Inc: Un método de medición de una distancia que comprende: instalar un miembro de referencia en una superficie de un primer miembro metálico (P1), e instalar un miembro […]
LIDAR basado en SMEM, del 19 de Febrero de 2020, de Windar Photonics A/S: Un sistema LIDAR que comprende: - una sección generadora de haz adaptada para generar un haz de salida ; - una pluralidad de unidades ópticas de enfoque […]
Dispositivo electrónico a medida del casco para una embarcación, del 1 de Enero de 2020, de Consilium SAL Navigation AB: Una disposición para una embarcación marina, en la que la disposición comprende: un asiento que comprende un orificio de paso […]
 Cámara, del 27 de Noviembre de 2019, de Nctech Ltd: Cámara panorámica que presenta un campo de visión global de 360° y configurada para capturar una imagen de 360° de una escena que se extiende alrededor […]
Cámara, del 27 de Noviembre de 2019, de Nctech Ltd: Cámara panorámica que presenta un campo de visión global de 360° y configurada para capturar una imagen de 360° de una escena que se extiende alrededor […]
Dispositivo optoelectrónico, del 6 de Noviembre de 2019, de VISHAY SEMICONDUCTOR GMBH: Dispositivo sensor optoelectrónico con: al menos un emisor optoelectrónico y al menos un receptor optoelectrónico , un medio de almacenamiento […]
Aparato de detección de luz de alta velocidad, del 30 de Octubre de 2019, de Artilux Inc: Aparato óptico que comprende: un sustrato semiconductor de silicio [reivindicación 14]; una capa de germanio-silicio acoplada al sustrato semiconductor, […]
Unidad modular de irradiación láser, del 28 de Agosto de 2019, de MBDA Deutschland GmbH: Unidad de irradiación láser para irradiar un objeto objetivo con radiación láser de alta potencia , comprendiendo la unidad de irradiación […]