SENSOR DE ANGULO DE ROTACION Y METODO PARA DETERMINAR LA POSICION ANGULAR ABSOLUTA DE UN CUERPO QUE EFECTUA VARIAS ROTACIONES.
Sensor de ángulo de giro para la determinación de la posición angular absoluta de un cuerpo giratorio que puede girar varias vueltas,
por ejemplo el eje de la dirección de un vehículo automóvil, con dos elementos de medida con principio de funcionamiento magnético, comprendiendo cada uno un elemento codificador magnético que se mueve en rotación respecto de un elemento sensor y que es arrastrado por el cuerpo, estando arrastrados los dos elementos codificadores con distintas relaciones de transmisión para la determinación del ángulo de pulsación que resulta de la diferencia de la información de ángulo de los elementos codificadores, escogiéndose las relaciones de transmisión de manera que dentro del rango de medición de ángulo que comprende varias vueltas del cuerpo giratorio, están comprendidos más de un periodo de ángulo de pulsación, y siendo diferente la posición angular absoluta de los elementos codificadores en el período de ángulo de pulsación, caracterizado porque la posición angular absoluta de los elementos codificadores en periodos de ángulo de pulsación sucesivos está desplazada en una fracción 1/n del rango de medición de un elemento sensor, siendo n el número de periodos de ángulo de pulsación comprendidos en el rango de medición
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2007/001126.
Solicitante: LEOPOLD KOSTAL GMBH & CO. KG.
Nacionalidad solicitante: Alemania.
Dirección: WIESENSTRASSE 47,58507 LUDENSCHEID.
Inventor/es: SCHIRP, CHRISTIAN, MAIER,OLIVER.
Fecha de Publicación: .
Fecha Concesión Europea: 16 de Diciembre de 2009.
Clasificación Internacional de Patentes:
- G01D5/14B1
Clasificación PCT:
- G01D5/14 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › que influyen en la magnitud de una corriente o voltaje.
Fragmento de la descripción:
Sensor de ángulo de rotación y método para determinar la posición angular absoluta de un cuerpo que efectúa varias rotaciones.
La invención se refiere a un sensor de ángulo de giro para la determinación de la posición angular absoluta de un cuerpo giratorio que puede girar varias vueltas, por ejemplo el eje de la dirección de un vehículo automóvil, con dos elementos de medida con principio de funcionamiento magnético, comprendiendo cada uno un elemento codificador magnético que se mueve en rotación respecto de un elemento sensor y que es arrastrado por el cuerpo, estando arrastrados los dos elementos codificadores con distintas relaciones de transmisión para la determinación del ángulo de pulsación que resulta de la diferencia de la información de ángulo de los elementos codificadores, escogiéndose las relaciones de transmisión de manera que dentro del rango de medición de ángulo que comprende varias vueltas del cuerpo giratorio, están comprendidos más de un periodo de ángulo de pulsación, y siendo diferente la posición angular absoluta de los elementos codificadores en el período de ángulo de pulsación. La invención se refiere también a un procedimiento para la determinación de la posición angular absoluta de un sensor de ángulo de giro de este tipo.
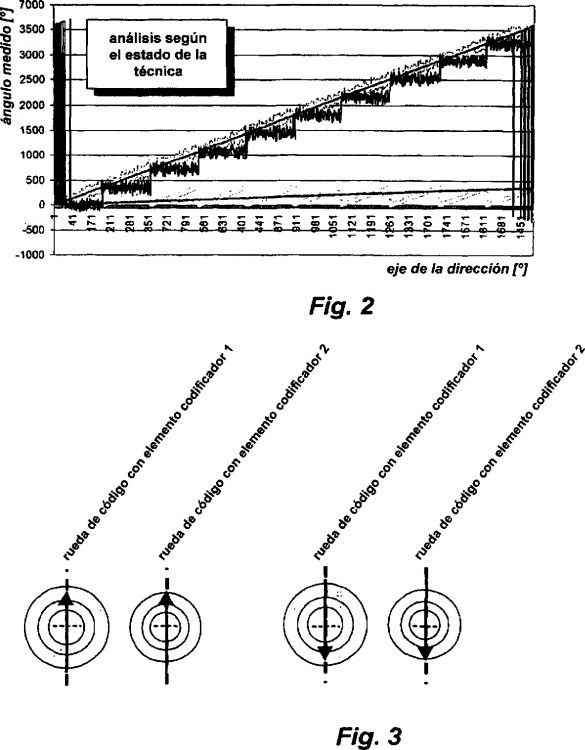
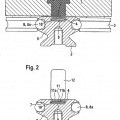
Los sensores de ángulo de giro se utilizan para determinar el valor de la posición angular actual de un cuerpo fijado con libertad de giro, por ejemplo de un eje. Los sensores de ángulo de giro de este tipo se utilizan entre otras aplicaciones, como sensores de ángulo de la dirección para captar la posición angular del eje de la dirección de un vehículo automóvil. Como sensores de ángulo de volante se conocen por ejemplo los de principio de funcionamiento optoelectrónico en los que un disco de código unido funcionalmente con el eje de la dirección contiene la información de ángulo. Este disco de código rodea radialmente el perímetro del eje de la dirección y precisa de una cierta extensión radial para que se pueda disponer en él la requerida información de ángulo. Esto se aplica especialmente a aquellos sensores de ángulo mediante los cuales se debe determinar la posición angular absoluta del eje de la dirección en un intervalo de medición que comprende varias vueltas. Junto a estos sensores de eje de dirección se han dado a conocer sensores con principio de funcionamiento magnético como sensores de ángulo de giro absoluto. En estos sensores de ángulo de giro conocidos, el cuerpo giratorio, por ejemplo el eje de la dirección, arrastra dos ruedas de código. Las ruedas de código tienen una corona dentada exterior. El dentado de las ruedas de código engrana con una rueda motriz de dentado exterior en el eje de la dirección. Las ruedas de código tienen respectivamente un elemento codificador magnético cuya orientación del campo magnético es una medida de la posición angular de la rueda codificadora. Las dos ruedas de código están accionadas por la rueda motriz asociada al cuerpo giratorio con distintas relaciones de transmisión. Mediante la aplicación del llamado principio del nonius se determina la posición angular del cuerpo giratorio dentro de su rango de medición que comprende varias vueltas. Las ruedas de código tienen un número de dientes menor que el de la rueda motriz asociada al cuerpo giratorio. La desmultiplicación está concebida de manera que las ruedas de código giran n veces 360º dentro del rango de medición que comprende varias vueltas, siendo n mayor que el número de vueltas del rango de medición de ángulo. Mientras que por ejemplo una rueda codificadora gira completamente nueve veces sobre el rango de medición predeterminado del cuerpo de rotación, la otra rueda codificadora gira completamente diez veces sobre su eje en el mismo rango de medición. Como elementos receptores sirven sensores sensibles a campos magnéticos tales como los sensores GMR, AMR o Hall. La diferencia entre la información de ángulo de los dos elementos de medida genera a lo largo de todo el rango de medición un ángulo de pulsación, que en un extremo del rango de medición de ángulo tiene el valor 0 y en el otro extremo del rango de medición del sensor de ángulo tiene un valor que se corresponde con la máxima señal de salida de uno de los elementos de medida. El ángulo de pulsación que se extiende sobre todo el rango de medición de ángulo tiene una pendiente constante. Para determinar la vuelta de la rueda codificadora en la que se encuentra el sensor de ángulo de giro, se escala el ángulo de pulsación y de él se resta la información de ángulo de un elemento de medida asociado a una rueda codificadora. El escalado del ángulo de pulsación está configurado de manera que después de restar la información de ángulo del ángulo de pulsación escalado, se obtienen segmentos de curva horizontales, que definen respetivamente un nivel. Cada nivel define una vuelta de esta rueda codificadora de modo que se puede obtener la información sobre las vueltas necesaria para la determinación del ángulo absoluto. Un sensor de este tipo ha sido dado a conocer por el documento EP 0 877 916 A1.
Sin embargo, en estos sensores de ángulo de giro las perturbaciones en las señales de los elementos de medida tienen como consecuencia una reducción del rango de medida útil.
La información sobre el ángulo del cuerpo giratorio por ejemplo del eje de la dirección, obtenida mediante un sensor de ángulo de este tipo se controla en el caso de sensores de ángulo de la dirección mediante la posición angular de las ruedas, en el marco de una prueba de plausibilidad. La posición angular de las ruedas se determina mediante la diferencia de velocidad de giro de las ruedas delanteras del vehículo gobernadas por la dirección. La precisión de medida en esta determinación de la posición angular de las ruedas puede ser del orden del error de ángulo que se produce al seleccionar una vuelta adyacente. Esto conduce a determinaciones de ángulo erróneas en el marco de la prueba de plausibilidad de la información obtenida mediante el sensor de ángulo de la dirección.
Se conoce por el documento DE 103 43 543 Bun sensor de ángulo de giro según el preámbulo de la reivindicación 1. El rango de medición de este sensor comprende un número de periodos de ángulo de pulsación, escogiéndose los periodos cíclicos de los dos elementos codificadores de modo que el menor múltiplo común de los periodos cíclicos es igual a un ángulo predeterminado de la dirección de un automóvil. Esto conduce a relaciones de transmisión muy diferentes para los dos elementos codificadores y en consecuencia a diferencias de giro muy elevadas.
El sensor de ángulo de giro según la presente invención tiene la ventaja respecto a este sensor conocido, de que los dos elementos codificadores pueden escogerse con relaciones de transmisión muy similares, de manera que comparativamente en los dos elementos codificadores se alcanzan velocidades de giro menores. De aquí resulta, junto a una construcción simplificada, una menor generación de ruido y la posibilidad de aplicar un método de análisis muy sencillo y menos sensible a perturbaciones.
Según la invención esto se consigue gracias a que la posición angular absoluta de los elementos codificadores en periodos de ángulo de pulsación sucesivos está desplazada en una fracción 1/n del rango de medición de un elemento sensor, siendo n el número de periodos de ángulo de pulsación comprendidos en el rango de medición.
En este sensor de ángulo de giro, el arrastre con distintas relaciones de transmisión de los elementos codificadores que de forma conveniente se encuentran en las ruedas de código, se configura de manera que dentro del rango de medición que comprende varias vueltas, se encuentra más de un período de ángulo de pulsación, por ejemplo este período se repite periódicamente varias veces dentro del rango de medición de ángulo. La subdivisión del rango de medición de ángulo en varios periodos de ángulo de pulsación tiene como consecuencia que, en correspondencia con el número de periodos de ángulo de pulsación previstos dentro del rango de medición de ángulo, la pendiente del ángulo de pulsación dentro de cada período es mayor que en el caso de un único periodo de ángulo de pulsación extendiéndose en todo el rango de medición de ángulo. La mayor pendiente tiene directamente la consecuencia de que es mayor la distancia entre los niveles que sirven para la determinación de la vuelta y que se forman en el ángulo de pulsación escalado. Con la división del rango de medición de ángulo de un sensor de ángulo de la dirección en dos periodos de ángulo de pulsación sucesivos ya se consigue...
Reivindicaciones:
1. Sensor de ángulo de giro para la determinación de la posición angular absoluta de un cuerpo giratorio que puede girar varias vueltas, por ejemplo el eje de la dirección de un vehículo automóvil, con dos elementos de medida con principio de funcionamiento magnético, comprendiendo cada uno un elemento codificador magnético que se mueve en rotación respecto de un elemento sensor y que es arrastrado por el cuerpo, estando arrastrados los dos elementos codificadores con distintas relaciones de transmisión para la determinación del ángulo de pulsación que resulta de la diferencia de la información de ángulo de los elementos codificadores, escogiéndose las relaciones de transmisión de manera que dentro del rango de medición de ángulo que comprende varias vueltas del cuerpo giratorio, están comprendidos más de un periodo de ángulo de pulsación, y siendo diferente la posición angular absoluta de los elementos codificadores en el período de ángulo de pulsación, caracterizado porque la posición angular absoluta de los elementos codificadores en periodos de ángulo de pulsación sucesivos está desplazada en una fracción 1/n del rango de medición de un elemento sensor, siendo n el número de periodos de ángulo de pulsación comprendidos en el rango de medición.
2. Sensor de ángulo de giro según la reivindicación 1, caracterizado porque dentro del rango de medición se encuentran 2 ó más períodos de ángulo de pulsación.
3. Sensor de ángulo de giro según una de las reivindicaciones 1 ó 2, caracterizado porque los elementos codificadores forman parte respectivamente de una rueda de código con una corona dentada exterior, la cual a su vez interactúa con una rueda motriz del cuerpo giratorio.
4. Sensor de ángulo de giro según la reivindicación 3, caracterizado porque las ruedas de código tienen distinto número de dientes.
5. Sensor de ángulo de giro según la reivindicación 3 ó la 4, caracterizado porque el cuerpo giratorio soporta una rueda motriz con una corona dentada exterior con la que engranan las coronas dentadas de las ruedas de código.
6. Sensor de ángulo de giro según la reivindicación 3 ó la 4, caracterizado porque el cuerpo giratorio soporta dos ruedas motrices cada una de ellas con una corona dentada exterior pero con distinto número de dientes, engranando una rueda de código en el dentado de una rueda motriz respectiva.
7. Procedimiento para la determinación de la posición angular absoluta de un cuerpo giratorio que puede girar varias vueltas, por ejemplo el eje de la dirección de un vehículo automóvil, con dos elementos de medida con principio de funcionamiento magnético, comprendiendo cada uno un elemento codificador magnético que se mueve en rotación respecto de un elemento sensor y que es arrastrado por el cuerpo, estando arrastrados los dos elementos codificadores con distintas relaciones de transmisión, comprendiendo dicho procedimiento una determinación del ángulo de pulsación como diferencia de la información de ángulo de la señal de salida de los elementos codificadores, estando dividido el rango de medición de ángulo que comprende varias vueltas del cuerpo giratorio, en más de una sección de periodo de ángulo de pulsación, cada una de las cuales comprende un periodo de ángulo de pulsación, caracterizado porque la posición angular absoluta de los elementos codificadores en periodos de ángulo de pulsación sucesivos está desplazada en una fracción 1/n del rango de medición de un elemento sensor, siendo n el número de periodos de ángulo de pulsación comprendidos en el rango de medición de ángulo.
Patentes similares o relacionadas:
UNIDAD DE ENGRANAJE-ACCIONAMIENTO CON DETECCIÓN DEL NÚMERO DE REVOLUCIONES, del 1 de Diciembre de 2011, de ROBERT BOSCH GMBH: Unidad de engranaje-accionamiento , en especial para uso en vehículos de motor, con una rueda de accionamiento que engrana con una rueda de salida , caracterizada […]
GONIÓMETRO GUIADO A MANO, del 2 de Septiembre de 2011, de PREISSER MESSTECHNIK GMBH: Goniómetro guiado a mano con: • dos elementos de medida apoyados uno junto a otro pudiendo girar alrededor de un eje común, • medios sensores […]
 CARRIL DE GUÍA PARA UN RODAMIENTO LINEAL, del 5 de Abril de 2011, de SCHAEFFLER TECHNOLOGIES GMBH & CO. KG: Carril de guía para un rodamiento lineal, cuyo cuerpo de carril está provisto de un alojamiento para una implementación de medida que se extiende en la dirección longitudinal […]
CARRIL DE GUÍA PARA UN RODAMIENTO LINEAL, del 5 de Abril de 2011, de SCHAEFFLER TECHNOLOGIES GMBH & CO. KG: Carril de guía para un rodamiento lineal, cuyo cuerpo de carril está provisto de un alojamiento para una implementación de medida que se extiende en la dirección longitudinal […]
 PROCEDIMIENTO PARA LA DETERMINACIÓN DE LA DESVIACIÓN DE UN REDUCTOR DE AJUSTE, del 4 de Abril de 2011, de PIERBURG GMBH: Reductor de ajuste con dispositivos para determinar la desviación que presenta un reductor de ajuste respecto a una posición de partida predeterminada, […]
PROCEDIMIENTO PARA LA DETERMINACIÓN DE LA DESVIACIÓN DE UN REDUCTOR DE AJUSTE, del 4 de Abril de 2011, de PIERBURG GMBH: Reductor de ajuste con dispositivos para determinar la desviación que presenta un reductor de ajuste respecto a una posición de partida predeterminada, […]
 DISPOSITIVO PARA MEDIR EL DESPLAZAMIENTO DE UN OBJETO MOVIL CON RESPECTO A UN SISTEMA DE REFERENCIA FIJO, del 17 de Enero de 2011, de GALILEO ENGINEERING S.R.L.: Dispositivo para medir el desplazamiento de un objeto móvil con respecto a un sistema de referencia fijo. El objeto móvil incorpora al menos un […]
DISPOSITIVO PARA MEDIR EL DESPLAZAMIENTO DE UN OBJETO MOVIL CON RESPECTO A UN SISTEMA DE REFERENCIA FIJO, del 17 de Enero de 2011, de GALILEO ENGINEERING S.R.L.: Dispositivo para medir el desplazamiento de un objeto móvil con respecto a un sistema de referencia fijo. El objeto móvil incorpora al menos un […]
 CONCEPTO PARA LA ACTIVACION DE UN DISPOSITIVO DE JUEGO, del 22 de Octubre de 2010, de CAIROS TECHNOLOGIES AG: Pelota de juego con las siguientes características:
un sensor de campo magnético ;
un dispositivo lector para la lectura del sensor de campo […]
CONCEPTO PARA LA ACTIVACION DE UN DISPOSITIVO DE JUEGO, del 22 de Octubre de 2010, de CAIROS TECHNOLOGIES AG: Pelota de juego con las siguientes características:
un sensor de campo magnético ;
un dispositivo lector para la lectura del sensor de campo […]
 INSTALACION DE DETECCION CON UN SENSOR ANGULAR, del 22 de Septiembre de 2010, de MICRONAS GMBH: Instalación de detección con un sensor angular para una disposición formada por dos partes giratorias una con respecto a la otra, a […]
INSTALACION DE DETECCION CON UN SENSOR ANGULAR, del 22 de Septiembre de 2010, de MICRONAS GMBH: Instalación de detección con un sensor angular para una disposición formada por dos partes giratorias una con respecto a la otra, a […]
 DETECTOR DE POSICION, del 22 de Junio de 2010, de MEHNERT, WALTER, DR. THEIL, THOMAS, DR.: Detector de posición para el registro de movimientos de traslación y/o de rotación con al menos un imán excitador (EM), sólo un elemento ferromagnético […]
DETECTOR DE POSICION, del 22 de Junio de 2010, de MEHNERT, WALTER, DR. THEIL, THOMAS, DR.: Detector de posición para el registro de movimientos de traslación y/o de rotación con al menos un imán excitador (EM), sólo un elemento ferromagnético […]