Robot y sistema de transferencia de sustrato.
Un robot de transferencia de sustrato (1) que comprende:
un efector extremo (22) configurado para sostener un sustrato en un estado sensiblemente horizontal;
una unidad de accionamiento vertical (18, 23, 24, 25) configurada para accionar el efector extremo para moverse en una dirección vertical;
una unidad de accionamiento horizontal (11, 19, 20, 21) configurada para accionar la unidad de accionamiento vertical para moverse en una dirección horizontal; y
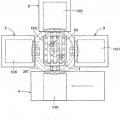
una unidad de accionamiento de rotación (12, 14, 15, 16) configurada para rotar la unidad de accionamiento horizontal alrededor de un eje de rotación (17) que se extiende en la dirección vertical,
en el que un extremo del efector extremo está conectado con la unidad de accionamiento vertical,
en el que un extremo inferior de la unidad de accionamiento vertical está conectado con la unidad de accionamiento horizontal, y
en el que una superficie superior del efector extremo se extiende en la dirección horizontal de manera que el sustrato se sostiene sobre la superficie superior del efector extremo.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/JP2009/066751.
Solicitante: KAWASAKI JUKOGYO KABUSHIKI KAISHA.
Inventor/es: HASHIMOTO,YASUHIKO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J9/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › por rotación de un brazo al menos, excluyendo el movimiento de la mano, p. ej. del tipo coordenadas cilíndricas o coordenadas polares.
- H01L21/677 ELECTRICIDAD. › H01 ELEMENTOS ELECTRICOS BASICOS. › H01L DISPOSITIVOS SEMICONDUCTORES; DISPOSITIVOS ELECTRICOS DE ESTADO SOLIDO NO PREVISTOS EN OTRO LUGAR (utilización de dispositivos semiconductores para medida G01; resistencias en general H01C; imanes, inductancias, transformadores H01F; condensadores en general H01G; dispositivos electrolíticos H01G 9/00; pilas, acumuladores H01M; guías de ondas, resonadores o líneas del tipo guía de ondas H01P; conectadores de líneas, colectores de corriente H01R; dispositivos de emisión estimulada H01S; resonadores electromecánicos H03H; altavoces, micrófonos, cabezas de lectura para gramófonos o transductores acústicos electromecánicos análogos H04R; fuentes de luz eléctricas en general H05B; circuitos impresos, circuitos híbridos, envolturas o detalles de construcción de aparatos eléctricos, fabricación de conjuntos de componentes eléctricos H05K; empleo de dispositivos semiconductores en circuitos que tienen una aplicación particular, ver la subclase relativa a la aplicación). › H01L 21/00 Procedimientos o aparatos especialmente adaptados para la fabricación o el tratamiento de dispositivos semiconductores o de dispositivos de estado sólido, o bien de sus partes constitutivas. › para el transporte, p. ej. entre diferentes estaciones de trabajo.
PDF original: ES-2498742_T3.pdf
Fragmento de la descripción:
Robot y sistema de transferencia de sustrato Campo técnico La presente invención se refiere a un robot adaptado para transferir sustratos, y un sistema de transferencia de sustrato dotado con el robot. En particular, este robot o sistema de transferencia de sustrato es adecuado para transferir sustratos pesados, tales como sustratos de vidrios de grandes dimensiones para usar en paneles solares, o similares.
Técnica anterior Hoy en día, para las máquinas de procesado de sustrato, tales como una máquina de deposición química de vapor (CVD) o similares se usan varios robots para transferir los sustratos que se van a procesar y/o los sustratos que ya 15 han sido procesados.
Como un ejemplo del sustrato a procesarse por dicha máquina de procesado de sustrato, se conoce un sustrato de vidrio de forma cuadrada para usar en el panel solar. En general, este sustrato de vidrio está dimensionado para tener un lado de 2 m, y por lo tanto es considerablemente pesado y de grandes dimensiones.
A fin de transferir con seguridad y firmemente dicho sustrato de vidrio de grandes dimensiones para usar en el panel solar o similar, es necesario proporcionar el robot que se puede acomodar adecuadamente a dicho peso pesado del sustrato.
Adicionalmente, a fin de instalar el sistema de transferencia de sustrato en un espacio o área limitado, es necesario minimizar las dimensiones del sistema tan pequeñas como sea posible.
Referencias de la técnica relacionada Documentos de patente Documento de patente 1: JP2008-137115A Documento de patente 2: JP2008-73788A Documento de patente 3: JP2007-260862A
Documento de patente 4: JP2007-54939A
Sin embargo, en el anterior robot de transferencia de sustrato convencional, cuando se eleva el sustrato junto con un efector extremo del robot, un brazo o parte similar, al cual está unido el efector extremo, se eleva junto con el efector extremo que sostiene el sustrato.
En consecuencia, a fin de elevar con seguridad y firmemente dicho sustrato de vidrio pesado y de grandes dimensiones que tiene un lado de longitud superior a 2 m, es necesario proporcionar un motor de una capacidad considerablemente grande como fuente de impulsión, conduciendo de este modo a un aumento sensible del tamaño y el coste de producción de todo el sistema.
Adicionalmente a dicho problema que puede tender a aumentar sensiblemente el tamaño del robot de transferencia de sustrato convencional, la demanda actual para evitar de forma posible una interferencia no deseada entre cada uno del sustrato y el brazo o parte similar dificulta bastante emplear una disposición adecuadamente compacta sobre la distribución de la máquina de procesado de sustrato y similares alrededor del robot.
Además, el robot de transferencia de sustrato convencional mencionado anteriormente está diseñado para tener el brazo que se extiende en la dirección horizontal cuando el efector extremo se mueve en la dirección horizontal. Esta estructura puede tender a provocar alguna elevación no deseada de la posición del efector extremo atribuible al doblado debido al peso de dicho brazo extendido.
El documento JP-A-2008 053643 divulga un robot de transferencia de sustrato que tiene una unidad manual para colocar un sustrato y unos medios de posicionamiento para posicionar el sustrato posicionado sobre la unidad manual, en el que la unidad manual tiene una porción de mano y una pluralidad de elementos de colocación que sobresalen hacia arriba desde la porción de mano para así colocar el sustrato, en el que los elementos de 60 colocación están soportados cada uno de manera que pueden rotar libremente en el extremo superior.
El documento JP-A-05 039194 divulga un robot de transferencia adecuado para sostener un sustrato y que comprende un efector extremo con forma de horca impulsados mediante una unidad de accionamiento vertical conectada con una unidad de accionamiento horizontal rotada mediante una unidad de accionamiento de rotación.
El documento JP-A-3 284534 divulga un dispositivo de transferencia que tiene una mano con forma de U para sostener una caja dentro de la cual unos objetos pueden caer de una cinta transportadora. El dispositivo también incluye una unidad de accionamiento vertical para mover la mano en una dirección vertical; una unidad de accionamiento horizontal para la unidad de accionamiento vertical; y una unidad de accionamiento de rotación para rotar la unidad de accionamiento horizontal.
Divulgación de la invención La presente invención fue hecha a la luz de las circunstancias anteriores. En consecuencia, es un objeto de esta invención proporcionar un robot de transferencia de sustrato y un sistema de transferencia de sustrato que incluye este robot, configurados respectivamente para evitar de forma posible el aumento no deseado de tamaño de toda la estructura, así como para conseguir un carro significativamente seguro y firme para artículos considerablemente pesados, tal como el sustrato de vidrio de grandes dimensiones.
Otro objeto de esta invención es proporcionar un robot de transferencia de sustrato y un sistema de transferencia de sustrato que incluye este robot, que puede ser capaz de una distribución significativamente compacta de la disposición de la máquina de procesado de sustrato y similares alrededor del robot de transferencia de sustrato que se va a adoptar.
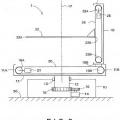
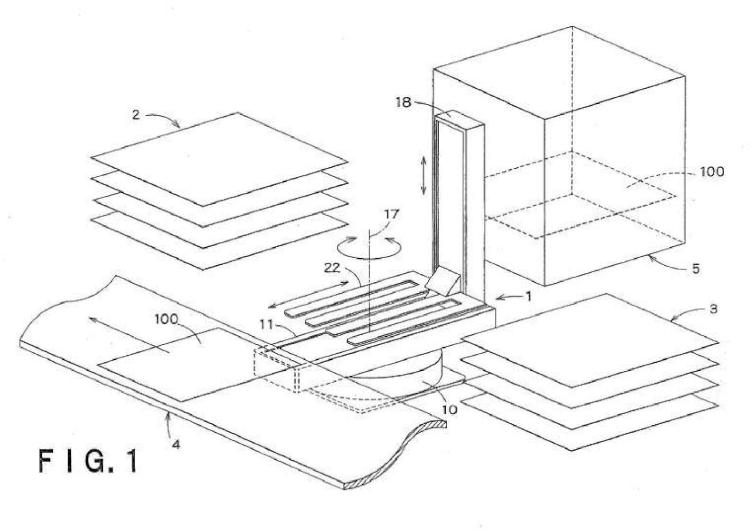
A fin de conseguir el objeto anterior, la presente invención proporciona un robot de transferencia de sustrato que comprende un efector extremo configurado para sostener un sustrato en un estado sensiblemente horizontal; una unidad de accionamiento vertical configurada para accionar el efector extremo para moverse en una dirección vertical; una unidad de accionamiento horizontal configurada para accionar la unidad de accionamiento vertical para moverse en una dirección horizontal; y una unidad de accionamiento de rotación configurada para rotar la unidad de accionamiento horizontal alrededor de un eje de rotación que se extiende en la dirección vertical, en el que un extremo del efector extremo está conectado con la unidad de accionamiento vertical, y en el que un extremo inferior de la unidad de accionamiento vertical está conectado con la unidad de accionamiento horizontal, y en el que una superficie superior del efector extremo se extiende en la dirección horizontal de manera que el sustrato se sostiene en la superficie superior del efector extremo.
Preferentemente, la unidad de accionamiento horizontal incluye un elemento de soporte de desplazamiento que se extiende en la dirección horizontal, el elemento de soporte de desplazamiento que tiene un extremo frontal y un extremo posterior y que está configurado para rotarse alrededor del eje de rotación mediante la unidad de accionamiento de rotación, y un mecanismo de accionamiento de desplazamiento configurado para accionar la unidad de accionamiento vertical para desplazarse entre el extremo frontal y el extremo posterior del elemento de soporte de desplazamiento, y la unidad de accionamiento de rotación estando localizada entre el extremo frontal y el extremo posterior del elemento de soporte de desplazamiento.
Preferentemente, el mecanismo de accionamiento de desplazamiento incluye una correa de transferencia horizontal provista desde el extremo frontal al extremo posterior del elemento de soporte de desplazamiento, un extremo inferior de la unidad de accionamiento vertical estando unido firmemente a la correa de transferencia horizontal, y un motor de transferencia horizontal configurado para accionar la correa de transferencia horizontal.
Preferentemente, la unidad de accionamiento vertical incluye un elemento de soporte de elevación que se extiende 45 en la dirección vertical y que tiene un extremo superior y un extremo inferior, el extremo inferior del elemento de soporte de elevación estando unido a la unidad de accionamiento horizontal, y un mecanismo de accionamiento de elevación configurado para elevar el efector extremo entre el extremo superior y el extremo inferior del elemento de soporte de elevación.
Preferentemente, el mecanismo de accionamiento de elevación incluye una correa de transferencia vertical provista desde el extremo superior al extremo inferior del elemento de soporte de elevación, un extremo próximo del efector extremo estando unido firmemente a la correa de transferencia vertical, y un motor de transferencia vertical configurado para accionar la correa de transferencia vertical.
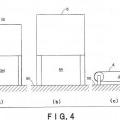
Preferentemente, el efector extremo se extiende en la dirección horizontal y tiene un extremo próximo y un extremo distal, el extremo próximo del efector extremo estando unido a la unidad de accionamiento vertical. Cuando la unidad de accionamiento vertical está posicionada... [Seguir leyendo]
Reivindicaciones:
1. Un robot de transferencia de sustrato (1) que comprende: un efector extremo (22) configurado para sostener un sustrato en un estado sensiblemente horizontal;
una unidad de accionamiento vertical (18, 23, 24, 25) configurada para accionar el efector extremo para moverse en una dirección vertical; una unidad de accionamiento horizontal (11, 19, 20, 21) configurada para accionar la unidad de accionamiento vertical para moverse en una dirección horizontal; y una unidad de accionamiento de rotación (12, 14, 15, 16) configurada para rotar la unidad de accionamiento horizontal alrededor de un eje de rotación (17) que se extiende en la dirección vertical, en el que un extremo del efector extremo está conectado con la unidad de accionamiento vertical, en el que un extremo inferior de la unidad de accionamiento vertical está conectado con la unidad de accionamiento horizontal, y en el que una superficie superior del efector extremo se extiende en la dirección horizontal de manera que el sustrato se sostiene sobre la superficie superior del efector extremo.
2. El robot de transferencia de sustrato según la reivindicación 1, en el que el efector extremo es sensiblemente plano y se extiende en un plano horizontal para soportar sobre una superficie superior del mismo un sustrato de vidrio para un panel solar en un estado sensiblemente horizontal.
3. El robot de transferencia de sustrato según la reivindicación 1 o 2, en el que la unidad de accionamiento horizontal incluye un elemento de soporte de desplazamiento (11) que se extiende en la dirección horizontal, el elemento de soporte de desplazamiento que tiene un extremo frontal y un extremo posterior y que está configurado para rotarse alrededor del eje de rotación (17) mediante la unidad de accionamiento de rotación, y un mecanismo de
accionamiento de desplazamiento (19, 20, 21) configurado para accionar la unidad de accionamiento vertical para desplazarse entre el extremo frontal y el extremo posterior del elemento de soporte de desplazamiento, y en el que la unidad de accionamiento de rotación está localizada entre el extremo frontal y el extremo posterior del elemento de soporte de desplazamiento.
4. El robot de transferencia de sustrato según la reivindicación 3, en el que el mecanismo de accionamiento de desplazamiento incluye una correa de transferencia horizontal (20) provista desde el extremo frontal al extremo posterior del elemento de soporte de desplazamiento, un extremo inferior de la unidad de accionamiento vertical estando unido firmemente a la correa de transferencia horizontal, y un motor de transferencia horizontal (21) configurado para accionar la correa de transferencia horizontal.
5. El robot de transferencia de sustrato según la reivindicación 3 o 4, en el que la unidad de accionamiento vertical incluye un elemento de soporte de elevación (18) que se extiende en la dirección vertical y que tiene un extremo superior y un extremo inferior, el extremo inferior del elemento de soporte de elevación estando unido a la unidad de accionamiento horizontal, y un mecanismo de accionamiento de elevación (23, 24, 25) configurado para elevar el efector extremo entre el extremo superior y el extremo inferior del elemento de soporte de elevación.
6. El robot de transferencia de sustrato según la reivindicación 5, en el que el mecanismo de accionamiento de elevación incluye una correa de transferencia vertical (24) provista desde el extremo superior al extremo inferior del elemento de soporte de elevación, un extremo próximo del efector extremo estando unido firmemente a la correa de
transferencia vertical, y un motor de transferencia vertical (25) configurado para accionar la correa de transferencia vertical.
7. El robot de transferencia de sustrato según una cualquiera de las reivindicaciones 1 a 6, en el que el efector extremo se extiende en la dirección horizontal y tiene un extremo próximo y un extremo distal, el extremo próximo del efector extremo estando unido a la unidad de accionamiento vertical, y en el que, cuando la unidad de accionamiento vertical está posicionada en un extremo posterior de la unidad de accionamiento horizontal, el extremo distal del efector extremo está posicionado en un lado posterior extremo en relación a un extremo frontal de la unidad de accionamiento horizontal.
8. El robot de transferencia de sustrato según una cualquiera de las reivindicaciones 1 a 7, en el que el eje de rotación está posicionado más cerca de un extremo posterior de la unidad de accionamiento horizontal que de una posición central de la misma en una dirección longitudinal de la unidad de accionamiento horizontal.
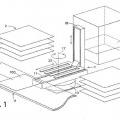
9. Un sistema de transferencia de sustrato que comprende: el robot de transferencia de sustrato (1) de acuerdo con la reivindicación 1 configurado para transferir el sustrato a / desde una máquina de procesado de sustrato (5) situada adyacente al robot para procesar el sustrato; y una unidad para portar dentro / fuera el sustrato (4) situada adyacente al robot y configurada para portar dentro el sustrato a una posición cerca del robot así como portar fuera el sustrato recibido del robot.
10. El sistema de transferencia de sustrato según la reivindicación 9, que comprende además una unidad de almacenamiento temporal (2) situada adyacente al robot y configurada para almacenar temporalmente en la misma 9
el sustrato transferido por el robot entre la unidad para portar dentro / fuera el sustrato y la máquina de procesado de sustrato.
11. El sistema de transferencia de sustrato según la reivindicación 10, en el que el efector extremo se extiende en la dirección horizontal y tiene un extremo próximo y un extremo distal, el extremo próximo del efector extremo estando unido a la unidad de accionamiento vertical, en el que el robot está configurado tal que cuando la unidad de accionamiento vertical está posicionada en un extremo posterior de la unidad de accionamiento horizontal, el extremo distal del efector extremo está posicionado en un lado posterior extremo en relación a un extremo frontal de la unidad de accionamiento horizontal, y en el que un espacio abierto, el cual está abierto por lo menos un lado orientado al robot, está provisto en una porción inferior de por lo menos una de la máquina de procesado de sustrato y la unidad de almacenamiento temporal, y en el que el robot está posicionado tal que cuando la unidad de accionamiento horizontal rota alrededor del eje de rotación, el extremo frontal de la unidad de accionamiento horizontal atraviesa por lo menos un espacio abierto.
12. El sistema de transferencia de sustrato según la reivindicación 10 o 11, en el que la máquina de procesado de sustrato y la unidad para portar dentro / fuera el sustrato están dispuestas para estar opuestas la una en relación a la otra con el robot estando posicionado entre las mismas, y en el que la unidad de almacenamiento temporal está posicionada en una línea ortogonal a una línea definida entre la máquina de procesado de sustrato y la unidad para portar dentro / fuera el sustrato.
13. El sistema de transferencia de sustrato según la reivindicación 12, en el que un par de unidades de almacenamiento temporal (2, 3) están dispuestas para estar opuestas la una en relación a la otra con el robot estando posicionado entre las mismas.
14. El sistema de transferencia de sustrato según una cualquiera de las reivindicaciones 9 a 13, en el que el eje de rotación está posicionado más cerca de un extremo posterior de la unidad de accionamiento horizontal que de una posición central de la misma en una dirección longitudinal de la unidad de accionamiento horizontal.
15. El sistema de transferencia de sustrato según una cualquiera de las reivindicaciones 9 a 14, en el que la unidad de accionamiento horizontal incluye un elemento de soporte de desplazamiento (11) que se extiende en la dirección horizontal, el elemento de soporte de desplazamiento que tiene un extremo frontal y un extremo posterior y estando configurado para rotar alrededor del eje de rotación (17) por la unidad de accionamiento de rotación, y un mecanismo de accionamiento de desplazamiento (19, 20, 21) configurado para accionar la unidad de accionamiento vertical para desplazarse entre el extremo frontal y el extremo posterior del elemento de soporte de desplazamiento, y en el que el mecanismo de accionamiento de desplazamiento incluye una correa de transferencia horizontal (20) provista desde el extremo frontal al extremo posterior del elemento de soporte de desplazamiento, un extremo inferior de la unidad de accionamiento vertical estando unido firmemente a la correa de transferencia horizontal, y un motor de transferencia horizontal (21) configurado para accionar la correa de transferencia horizontal.
16. El sistema de transferencia de sustrato según una cualquiera de las reivindicaciones 9 a 15, en el que la unidad de accionamiento vertical incluye un elemento de soporte de elevación (18) que se extiende en la dirección vertical, y que tiene un extremo superior y un extremo inferior, el extremo inferior del elemento de soporte de elevación 45 estando unido a la unidad de accionamiento horizontal, y un mecanismo de accionamiento de elevación (23, 24, 25) configurado para elevar el efector extremo entre el extremo superior y el extremo inferior del mecanismo de soporte de elevación, y en el que el mecanismo de accionamiento de elevación incluye una correa de transferencia vertical (21) provista desde el extremo superior al extremo inferior del elemento de soporte de elevación, un extremo próximo del efector 50 extremo estando unido firmemente a la correa de transferencia vertical, y un motor de transferencia vertical (25) configurado para accionar la correa de transferencia vertical.
17. El robot de transferencia de sustrato según la reivindicación 1, en el que el eje de rotación (17) está posicionado más cerca de un extremo posterior de la unidad de accionamiento horizontal que de una posición central de la 55 misma en una dirección longitudinal de la unidad de accionamiento horizontal, en el que el efector extremo se extiende en la dirección horizontal y tiene un extremo próximo y un extremo distal, el extremo próximo del efector extremo estando unido a la unidad de accionamiento vertical, y en el que, cuando la unidad de accionamiento vertical está posicionada en el extremo posterior de la unidad de accionamiento horizontal, el extremo distal del efector extremo y un extremo distal del sustrato sostenido en el 60 efector extremo están posicionados en el lado posterior extremo en relación a un extremo frontal de la unidad de accionamiento horizontal y en el extremo frontal de la unidad de accionamiento horizontal, y el eje de rotación está posicionado en una posición central del efector extremo en la dirección horizontal y en una posición central del sustrato sostenida en el efector extremo en la dirección horizontal.
Patentes similares o relacionadas:
Aparatos y procedimientos para el accionamiento remoto de puntos de control, del 24 de Junio de 2020, de Stevenson, Robert L: Aparato para el accionamiento remoto de un punto de control , que comprende: un elemento alargado que tiene un primer extremo y un […]
Máquina herramienta para la mecanización por arranque de virutas de una pieza de trabajo así como conjunto de soporte de husillo para el empleo en una máquina herramienta de este tipo, del 6 de Noviembre de 2019, de DECKEL MAHO PFRONTEN GMBH: Conjunto de soporte de husillo para el empleo en una máquina herramienta, con: - una sección de alojamiento del brazo articulado que se puede disponer o bien […]
Robot de instalación de revestimiento, en particular robot de manipulación, del 4 de Septiembre de 2019, de Dürr Systems AG: Robot de instalación de revestimiento, en particular como robot de manipulación para abrir o cerrar una carrocería de vehículo automóvil […]
Robot industrial de múltiples ejes, en particular de tipo SCARA, del 28 de Febrero de 2019, de COMAU S.P.A.: Un robot industrial de múltiples ejes, en particular de tipo SCARA, que comprende: - una estructura base; - un primer brazo de robot conectado de manera […]
Robot industrial de ejes múltiples, en particular de tipo SCARA, del 23 de Enero de 2019, de COMAU S.P.A.: Un robot industrial de ejes múltiples, en particular de tipo SCARA, que comprende: - una estructura de base; - un primer brazo […]
 Sistema robótico médico con brazo manipulador del tipo de coordenadas cilíndricas, del 8 de Noviembre de 2018, de THE EUROPEAN ATOMIC ENERGY COMMUNITY (EURATOM), REPRESENTED BY THE EUROPEAN COMMISSION: Sistema robótico médico para llevar a cabo procedimientos médicos, que comprende un manipulador de robot para la manipulación asistida por robot de […]
Sistema robótico médico con brazo manipulador del tipo de coordenadas cilíndricas, del 8 de Noviembre de 2018, de THE EUROPEAN ATOMIC ENERGY COMMUNITY (EURATOM), REPRESENTED BY THE EUROPEAN COMMISSION: Sistema robótico médico para llevar a cabo procedimientos médicos, que comprende un manipulador de robot para la manipulación asistida por robot de […]
Sistema de posicionador de pacientes, del 8 de Noviembre de 2017, de Henderson, Toby D: Un sistema de posicionador de pacientes, que comprende: un brazo robótico que proporciona cinco grados de libertad de rotación y un […]
AERONAVE CON DISPOSITIVO DE CONTACTO, del 2 de Junio de 2017, de FUNDACION ANDALUZA PARA EL DESARROLLO AEROESPACIAL: Aeronave con dispositivo de contacto. Aeronave con capacidad de vuelto estacionario y con dispositivo de contacto. Comprende un cuerpo principal […]