ROBOT SOLDADOR DE ESTRUCTURAS METALICAS.
Robot soldador de estructuras metálicas.
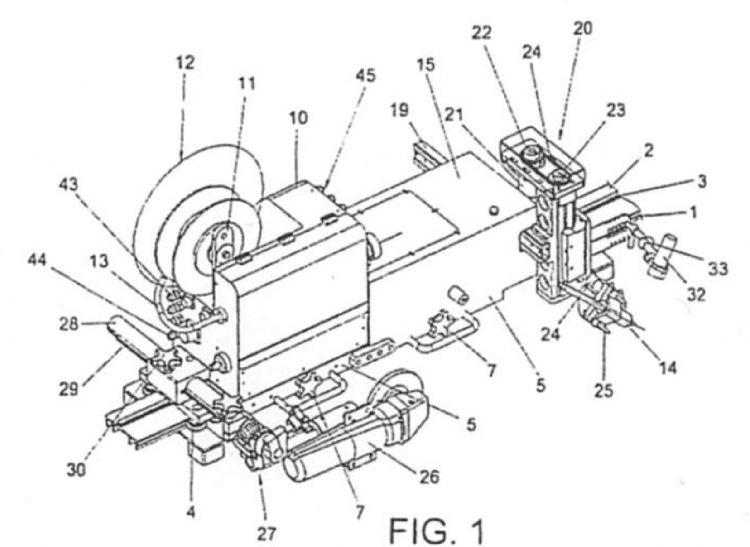
Comprende un módulo de control (34) para gobernar el funcionamiento del robot el cual se ubica sobre unas vías (1) de guiado de una plataforma (5) con ruedas (4),
medios de arrastre (3, 16) de la plataforma (5) sobre las vías (1), medios fijación de las vías (1) sobre la estructura metálica para situarlas paralelas a la junta a soldar. En la plataforma se incluye una bobina (12) de un hilo de soldadura que pasa a través de una antorcha de soldadura (14). Comprende medios de desplazamiento en los tres ejes de la antorcha (14) para ubicarla en la posición adecuada y realizar la soldadura, e incluye una unidad (26) de eliminación de escorias del cordón de soldadura realizado, así como una cámara (32) de captación de imágenes para visualizar la junta y la soldadura realizada
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200603024.
Solicitante: TESOL, S.L.
Nacionalidad solicitante: España.
Provincia: PONTEVEDRA.
Inventor/es: COUAGO PEREZ,FERNANDO, PEREZ MEIN,JAVIER.
Fecha de Solicitud: 27 de Noviembre de 2006.
Fecha de Publicación: .
Fecha de Concesión: 4 de Marzo de 2010.
Clasificación Internacional de Patentes:
- B23K9/12 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23K SOLDADURA SIN FUSION O DESOLDEO; SOLDADURA; REVESTIMIENTO O CHAPADO POR SOLDADURA O SOLDADURA SIN FUSION; CORTE POR CALENTAMIENTO LOCALIZADO, p. ej. CORTE CON SOPLETE; TRABAJO POR RAYOS LASER (fabricación de productos revestidos de metal por extrusión de metales B21C 23/22; realización de guarniciones o recubrimientos por moldeo B22D 19/08; moldeo por inmersión B22D 23/04; fabricación de capas compuestas por sinterización de polvos metálicos B22F 7/00; disposiciones sobre las máquinas para copiar o controlar B23Q; recubrimiento de metales o recubrimiento de materiales con metales, no previsto en otro lugar C23C; quemadores F23D). › B23K 9/00 Soldadura o corte por arco voltaico (soldadura eléctrica por escoria B23K 25/00; transformadores de soldadura H01F; generadores de soldadura H02K). › Alimentación automática de electrodos o de piezas o desplazamiento automático de electrodos o de piezas para la soldadura o para el corte por arco en líneas continuas o por puntos.
- B23K9/127 B23K 9/00 […] › Medios para seguir líneas durante la soldadura o el corte por arco (copiado en general B23Q 35/00).
Clasificación PCT:
- B23K9/12 B23K 9/00 […] › Alimentación automática de electrodos o de piezas o desplazamiento automático de electrodos o de piezas para la soldadura o para el corte por arco en líneas continuas o por puntos.
- B23K9/127 B23K 9/00 […] › Medios para seguir líneas durante la soldadura o el corte por arco (copiado en general B23Q 35/00).
Fragmento de la descripción:
Robot soldador de estructuras metálicas.
Objeto de la invención
La presente invención, tal y como se expresa en el enunciado de esta memoria descriptiva, consiste en un robot soldador de estructuras metálicas que tiene por objeto permitir realizar las soldaduras bajo la supervisión y control de un operario sin que éste tenga que encontrarse en el lugar concreto en el que se realiza la soldadura y sin que tenga que transportar continuamente el equipo de soldadura.
En general la invención es aplicable en cualquier sector en el que se requiera efectuar el soldado de estructuras metálicas, como por ejemplo es el caso de caldererías, grandes estructuras metálicas, construcción de puentes, construcción de esferas, construcción de tanques, etc., y más concretamente es aplicable en la construcción naval para la fabricación de cascos de barcos.
Antecedentes de la invención
A partir de los años 90, se comenzó a utilizar la soldadura por hilo continuo (proceso MAG), que consiste en un generador de energía similar a la de un electrodo, pero añadiendo una bobina de hilo acoplada a una unidad de arrastre, para empujar el hilo a través de una antorcha de soldadura que le transmite la corriente y gas de protección para ejecutar la soldadura, sin que se requiera realizar una gran cantidad de empalmes, tal y como sucede para el caso de la soldadura mediante electrodos.
Más adelante fue desarrollada la soldadura con soporte cerámico, que es una soldadura que se efectúa por una única cara, y que consiste en que la junta o unión a tope se deja separada aproximadamente 6 mm, y por el lado opuesto se coloca el soporte cerámico, que hace de molde, y aplicando la soldadura por el primer lado, se efectúa la unión de la junta sin necesidad de que haya que efectuar un posterior resanado. Este proceso permite soldar tramos continuos mientras alcance el brazo del soldador y la posición de éste.
En la actualidad en las uniones a tope en el casco o forro de un barco, se utiliza dicho proceso MAG para lo que el equipo de soldadura comprende: una unidad de arrastre de hilo de soldadura con una bobina del hilo de soldar, la antorcha de soldar, los cables de interconexión entre la fuente de alimentación y la unidad de arrastre del hilo, siendo el hilo de configuración tubular hueca.
Además en la construcción naval para realizar el soldado de casco de barco se requiere montar una cantidad enorme de andamios a todo lo largo y alto el barco, lo que representa un coste añadido en la fabricación de éste, ya que se requiere adquirir los andamios y realizar el montaje de los mismos.
Además, los soldadores para poder soldar las uniones de los bloques del barco, tienen que ir subiendo paso a paso por los andamios con el equipo de soldadura que pesa aproximadamente 30 kg., lo que supone un inconveniente añadido, al representar un enorme riesgo de accidentes y lesiones.
En consecuencia el soldador tiene que estar muy bien adiestrado para poder soldar la unión por una sola cara, para lo que en la unión se prevé un chaflán en "V" y separación entre bordes entre 4 y 10 mm., de manera que el soldador se sitúa en la junta, ajusta la intensidad, voltaje y velocidad del hilo y comienza a soldar. La velocidad de soldadura en una unión en proceso manual es entre 8 y 10 cm/minuto y el avance medio es de 35 ó 40 cm. ó 4 minutos sin parar. En esa posición el soldador deja de soldar para cambiar de posición, limpiar el final de soldadura con amoladora para conseguir la unión perfecta de la continuidad del cordón.
Por consiguiente el soldador ha de realizar paradas y además tiene que subir el equipo de soldadura al siguiente andamio, lo que conlleva un esfuerzo, posiciones difíciles al tener que soldar entre andamios, picar la escoria manualmente, con piqueta o radial, cepillar para la limpieza, etc., con una cantidad enorme de empalmes, donde cada uno es un riesgo de falta de fusión, porosidad, etc.
Todos estos inconvenientes unidos a que cuando se trata de soldar el casco de un buque que tiene entre 100 y 130 metros de eslora, las horas requeridas para realizar el soldado del casco pueden ser más de 50.000 horas de soldadura, con una longitud de 100 a 200 km. de soldadura.
Por consiguiente el actual sistema de soldadura de los cascos de los barcos resulta muy costoso y laborioso.
Descripción de la invención
Para resolver los inconvenientes y conseguir los objetivos anteriormente indicados, la invención ha desarrollado un robot soldador de estructuras metálicas que simplifica y abarata considerablemente el coste de las soldaduras, para lo que se caracteriza porque comprende unas vías de guiado de una plataforma con ruedas, de forma que dicha plataforma se desplaza sobre las vías, para lo que se han previsto medios de arrastre de la plataforma sobre las vías, que son gobernados por un módulo de control, que a su vez gobierna todo el funcionamiento del robot, y que se dispone en una posición alejada del conjunto determinado por las vías y plataforma, para permitir realizar la soldadura a distancia tal y como será descrito posteriormente.
El robot de la invención además prevé la incorporación de medios de fijación de las vías sobre la estructura metálica, para ubicar las vías paralelas a la junta a soldar de modo que el arrastre de la plataforma proporciona el desplazamiento longitudinal de ésta de forma paralela a las vías para permitir realizar la soldadura.
Además, la plataforma comprende un portabobinas de sujeción de una bobina en la que está enrollado un hilo de soldadura, habiéndose previsto una unidad de arrastre del hilo para ir tirando de éste a medida que se va efectuando la soldadura, para lo que dicho hilo se hace pasar a través de una antorcha de soladura soportada en la plataforma.
Para ubicar la antorcha de soldadura en el lugar adecuado que posibilite realizar la soldadura, se han previsto medios de desplazamiento transversal (oscilación, y elevación de la antorcha), los cuales son gobernados por el módulo de control para aplicar un cordón de soldadura sobre la junta, en una dirección al desplazar la plataforma mediante los medios de arrastre a lo largo de las vías.
Además la plataforma comprende una unidad de eliminación de escorias del cordón de soldadura realizado, unidad que es gobernada igualmente por el módulo de control para eliminar la escoria del cordón practicado, todo ello desplazando la plataforma en dirección contraria a la de realización de dicho cordón.
Para permitir realizar la soldadura de forma perfecta, en la plataforma se ha previsto una cámara de captación de imágenes capaz de ver íntegramente la fusión del hilo de soldadura y el material de base para visualizar la junta, o para visualizar la soldadura realizada de forma que se controla en todo momento la ejecución de la soldadura por parte del operario ubicado en el lugar en el que se encuentra dispuesto el módulo de control, e igualmente permite realizar la inspección de la soldadura efectuada mediante las imágenes captadas por la cámara de visualización.
Para ello el módulo de control comprende una consola de visualización de la imagen captada por la cámara y los diferentes parámetros de funcionamiento del robot.
Así, se ha previsto que el módulo de control comprenda medios para establecer la velocidad de avance de la plataforma, velocidad de desplazamiento transversal (oscilación de la antorcha al realizar la soldadura), su centrado, tipo de oscilación mediante la regulación del tiempo de parada de la oscilación en el lateral izquierdo, en el lateral derecho y amplitud de la oscilación, sentido de marcha, encendido/apagado de la antorcha, espesor de la soldadura, anchura mínima máxima de la junta a soldar, número de pasadas para rellenar y soldar la unión, y velocidad de arrastre del hilo.
En la realización preferente de la invención se ha previsto que los medios de arrastre de la plataforma sobre las vías de guiado, comprendan un motor, que es accionado por el módulo de control, y cuyo eje está unido a un piñón que engrana con una cremallera que queda dispuesta paralela a la vía de guiado, y además comprenden un mecanismo de embrague para engranar/desengranar el piñón sobre la cremallera.
Las vías de guiado están dispuestas en los laterales de un larguero y presentan una sección cónica en la que se insertan las ruedas de la plataforma, para lo que éstas presentan igual sección de forma que se consigue su perfecto acoplamiento y retención en las vías de guiado. Para...
Reivindicaciones:
1. Robot soldador de estructuras metálicas, caracterizado porque comprende:
2. Robot soldador de estructuras metálicas, según reivindicación 1, caracterizado porque el módulo de control comprende medios para establecer la velocidad de avance del carro (5), velocidad de desplazamiento transversal (oscilación) de la antorcha de soldadura (14); centrado, tipo de oscilación mediante la regulación del tiempo de parada de la oscilación en el lateral izquierdo, derecho y amplitud de oscilación; sentido de marcha, encendido/apagado de la antorcha de soldadura (14), espesor de soldadura; separación mínima y máxima de la junta a soldar, y número de cordones para realizar la soldadura de la junta.
3. Robot soldador de estructuras metálicas, según reivindicación 1, caracterizado porque los medios de arrastre de la plataforma (5) sobre las vías (1), comprenden un motor (16), accionado por el módulo de control (34), cuyo eje está unido a un piñón que engrana con una cremallera (3) paralela a las vías (1).
4. Robot soldador de estructuras metálicas, según reivindicaciones 1 ó 3, caracterizado porque las vías de guiado (1) están dispuestas en los laterales de un larguero (2) y presentan una sección cónica en la que se insertan las ruedas (4) de la plataforma (5), que tienen igual sección, para conseguir su acoplamiento y retención en las vías (1); estando la cremallera (3) dispuesta en la cara superior del larguero (2).
5. Robot soldador de estructuras metálicas, según reivindicación 4, caracterizado porque las ruedas (4) de uno de los laterales de la plataforma (5) son desplazables lateralmente para permitir su acoplamiento/desacoplamiento sobre las vías (1).
6. Robot soldador de estructuras metálicas, según reivindicación 1, caracterizado porque los medios de fijación de la vía de guiado sobre la estructura metálica están seleccionados entre un equipo de aire al vació que está conectado a unas ventosas (46), unos imanes y combinación de los mismos; estando dichos medios soportados en la parte inferior del larguero (2).
7. Robot soldador de estructuras metálicas, según reivindicación 1, caracterizado porque la unidad de arrastre (10) del hilo de soldadura comprende un motor, gobernado por el módulo de control (34), y un mecanismo de guiado del hilo.
8. Robot soldador de estructuras metálicas, según reivindicación 1, caracterizado porque la unidad de eliminación de escorias comprende una amoladora (26) unida a un eje, desplazable longitudinalmente mediante un motor, que engrana con una cremallera (29), y un mecanismo de descenso (27) de la amoladora (26).
9. Robot soldador de estructuras metálicas, según reivindicación 1, caracterizado porque el modulo de control. (34) comprende medios inalámbricos para gobernar el sistema remotamente.
10. Robot soldador de estructuras metálicas, según reivindicación 1, caracterizado porque el módulo de control (34) comprende medios de grabación de las imágenes captadas por la cámara (32).
Patentes similares o relacionadas:
Conjunto para ayudar en la retirada del almacenamiento y la transferencia de alambre, del 13 de Noviembre de 2019, de Alcotec Wire Corporation: Un conjunto para mover alambre desde un punto hasta un segundo punto alejado del primer punto, comprendiendo dicho conjunto: una primera unidad que comprende una […]
Dispositivo de reemplazo giratorio, del 17 de Julio de 2019, de Tipman Co., Ltd: Un cambiador giratorio configurado para unir o quitar una punta de contacto a/de un extremo de la punta de un cuerpo de antorcha (10a) de una antorcha […]
Procedimiento para el aprendizaje/ensayo de una secuencia de movimiento de un robot de soldadura, robot de soldadura y control asociado, del 12 de Abril de 2019, de FRONIUS INTERNATIONAL GMBH: Procedimiento para el aprendizaje de un robot de soldadura en el que se fija y guarda una posición por medio de un proceso de posicionamiento realizado manualmente, […]
Sistema de alimentación por cable para controlar la alimentación de un cable de soldadura, del 19 de Septiembre de 2018, de AWDS Technologies SRL: Sistema de alimentación por cable para alimentar un cable, en particular un cable de soldadura, desde un almacenamiento de cable hasta un soplete de soldadura […]
Aparato y método de soldadura para cintas transportadoras, del 12 de Septiembre de 2018, de Flexible Steel Lacing Company: Un aparato de soldadura de cintas para unir extremos de cinta monolítica, comprendiendo el aparato de soldadura de cintas: un bastidor […]
Método de supervisión de la vida útil de la punta de contacto de soldadura GMAW pulsada en función de parámetros representativos, del 11 de Octubre de 2017, de ILLINOIS TOOL WORKS INC.: Método para supervisar la vida útil de una punta de contacto en un soldador durante aplicaciones de soldadura GMAW pulsada, comprendiendo dicho método las etapas de: […]
Aparato de soldadura que tiene un pulsador de alambre, del 23 de Agosto de 2017, de AZZ WSI LLC: Un aparato de soldadura que comprende una fuente de alambre que tiene alambre de soldadura; un accionamiento de alimentación […]
Sirga para guiar un hilo, en particular un hilo de soldadura, con al menos dos tipos diferentes de cuerpos, del 15 de Marzo de 2017, de AWDS Technologies SRL: Una sirga para guiar un hilo , en particular un hilo de soldadura, formada por unos cuerpos dispuestos consecutivamente para formar […]