ROBOT MANIPULADOR E INSTALACION QUE LO INCLUYE.
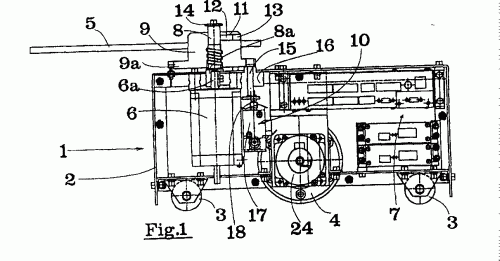
Robot manipulador motorizado (1) que comprende un primer motor (6) y un brazo manipulador (5) desplazable por medio de este primer motor (6) controlado por una unidad de mando y control (7),
dicho primer motor (6) y dicha unidad (7) se instalan en un bastidor (2) montado sobre unos órganos de rodadura (3), (4), el primer motor (6) estando equipado con un árbol de salida rotativo (6a) en el que se dispone de un par mecánico, caracterizado por el hecho de que: - el brazo manipulador (5) está fijado por una de sus extremidades a un cubo (9) provisto de un fileteado axial en el que se introduce atornillada la parte fileteada de un árbol de conducción (8) acoplado al árbol de salida rotativo del primer motor, - un mecanismo de freno está ligado al cubo (9) y al árbol motor (8), este mecanismo de freno asegura la inmovilización del cubo (9) en relación al árbol motor (8) siempre que el par de resistencia ejercido sobre el cubo (9) sea inferior a un valor predeterminado, y permite la rotación de uno respecto al otro cuando el par de resistencia es igual a ese valor, - el robot incluye un mecanismo de bloqueo en rotación (10) que se activa con la unidad de mando y control (7) para bloquear la rotación del cubo (9) y del brazo manipulador (5); este mecanismo, cuando está activado, acciona el bloqueo sobre el cubo (9) y/o sobre el brazo, entonces dicho brazo manipulador (5) puede desplazarse en translación respecto al bastidor por la acción del primer motor (6).
Tipo: Resumen de patente/invención.
Solicitante: SOLIGNAC, JEAN PIERRE.
Nacionalidad solicitante: Francia.
Dirección: 5, LES HAUTS DE POUROLS,34270 SAINT MATHIEU DE TREVIER.
Inventor/es: SOLIGNAC, JEAN PIERRE.
Fecha de Publicación: .
Fecha Solicitud PCT: 3 de Enero de 2000.
Fecha Concesión Europea: 8 de Octubre de 2003.
Clasificación Internacional de Patentes:
- B25J5/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores montados sobre ruedas o sobre soportes móviles (B25J 1/00 tiene prioridad; manipuladores de control programado B25J 9/00).
- B25J9/04 B25J […] › B25J 9/00 Manipuladores de control programado. › por rotación de un brazo al menos, excluyendo el movimiento de la mano, p. ej. del tipo coordenadas cilíndricas o coordenadas polares.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Finlandia, Chipre, Oficina Europea de Patentes.
Patentes similares o relacionadas:
Sensores de pista para detectar la posición del vehículo con respecto a las pistas, del 15 de Julio de 2020, de Autostore Technology AS: Un método para rastrear la posición de un vehículo operado remotamente siguiendo una ruta establecida en relación con las pistas establecidas en una estructura de marco que forma […]
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Procedimiento de tratamiento de una superficie, y autómata correspondiente, del 20 de Mayo de 2020, de Les Companions: Procedimiento de tratamiento de una superficie a tratar, por medio de un autómata que consta de: - una base configurada para […]
Manipulador de alimentos en un almacén, del 13 de Mayo de 2020, de Imaginalis S.r.l: Un manipulador de alimentos (1a) en un almacén ; comprendiendo dicho almacén una pluralidad de estaciones de almacenamiento (1b) en las que […]
Mecanismo de despliegue para normalización pasiva de un instrumento con relación a la superficie de una pieza de trabajo, del 1 de Enero de 2020, de SAUDI ARABIAN OIL COMPANY: Un aparato que se configura para transportar un instrumento y desplegar opcionalmente el instrumento en relación con una superficie que comprende: […]
Fabricación de producción ultraflexible, del 13 de Noviembre de 2019, de ABB SCHWEIZ AG: Un sistema de fabricacion que comprende: una pluralidad de celdas de trabajo , donde cada una de dichas celdas realiza uno o mas procesos […]
Aparato de distribución de carga de rueda magnética, del 21 de Agosto de 2019, de Tas Global Co., Ltd: Un aparato para limpiar el fondo de un barco en el que un aparato de distribución de carga comprende: una pluralidad de ruedas magnéticas para […]
Cortadora de alto rendimiento con pinza adaptada por unión de materiales, del 7 de Agosto de 2019, de GEA Food Solutions Germany GmbH (100.0%): Cortadora de alto rendimiento que presenta una cuchilla que corta lonchas de producto alimenticio de uno de los extremos de […]