Robot de limpieza que tiene función de realimentación de aire de escape.
Robot (500) de limpieza, que comprende:
una unidad (300) de succión dispuesta en una parte inferior del mismo;
un motor de succión para aspirar materiales extraños de una superficie que va a limpiarse, junto con aire, a través de la unidad de succión;
un colector (520) de polvo para capturar los materiales extraños que se aspiran, de modo que el aire, del que se eliminan los materiales extraños, escapa a través del motor de succión;
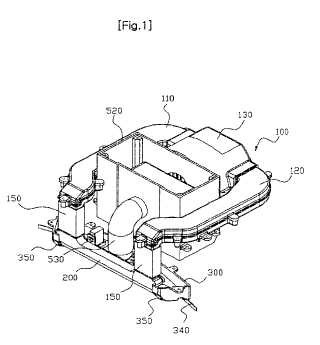
una unidad (100) de realimentación de aire de escape para alimentar el aire que escapa a través del motor de succión;
una unidad (200) de boquilla de pulverización insertada en la unidad de succión y situada en un extremo delantero de la unidad de succión, pulverizando la unidad de boquilla de pulverización el aire que se alimenta por la unidad de realimentación de aire de escape sobre la superficie que va a limpiarse;
caracterizado por una rejilla (130) giratoria conectada al colector de polvo, situada dentro del robot de limpieza, y que encierra el motor de succión en ella; y conductos (110, 120) de aire izquierdo y derecho, teniendo cada uno de ellos un extremo conectado a partes de extremo opuestas respectivas de la rejilla giratoria para comunicarse con ellas, y un extremo opuesto conectado a la unidad de boquilla de pulverización, en el que un soporte de motor de succión está dispuesto en la rejilla giratoria y soporta el motor de succión, y están formadas salidas en ambos lados de una parte inferior del soporte de motor de succión para dejar escapar el aire que se mueve a través del motor de succión.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/KR2007/004175.
Solicitante: HANOOL ROBOTICS CORP.
Nacionalidad solicitante: República de Corea.
Dirección: 401-901 BUCHEON TECHNO PARK BLDG., 193 YAKDAE-DONG, WONMI-GU BUCHEON-CITY, GYUNGGI-DO 420-734 REPUBLICA DE COREA.
Inventor/es: KIM,Byung-Soo, CHOI,Jae-Young, LEE,Se-Won, KIM,Sang-Hee.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A47L9/08 NECESIDADES CORRIENTES DE LA VIDA. › A47 MOBILIARIO; ARTICULOS O APARATOS DE USO DOMESTICO; MOLINILLOS DE CAFE; MOLINILLOS DE ESPECIAS; ASPIRADORES EN GENERAL. › A47L LAVADO O LIMPIEZA DOMESTICA (cepillos A46B; limpieza de grandes cantidades de botellas o de otros objetos huecos de una sola especie B08B 9/00; lavado de la ropa D06F ); ASPIRADORES EN GENERAL (limpieza en general B08). › A47L 9/00 Partes constitutivas o accesorios de aspiradores, p. ej. medios mecánicos para controlar la aspiración o para producir una acción de batido; Dispositivos para la conservación ordenada de los aspiradores o de sus piezas; Vehículos portadores especialmente concebidos para los aspiradores. › con medios adaptados de soplado.
- A47L9/22 A47L 9/00 […] › Piezas de ensamblaje de las aletas y del motor.
- A47L9/28 A47L 9/00 […] › Montaje del equipo eléctrico, p. ej. adaptación o fijación al aspirador; Control de los aspiradores por medios eléctricos.
PDF original: ES-2379401_T3.pdf
Fragmento de la descripción:
Robot de limpieza que tiene función de realimentación de aire de escape.
[Campo técnico]
La presente invención se refiere a un robot de limpieza que tiene una función de realimentación de aire de escape, y más particularmente, a un robot de limpieza que tiene una función de realimentación de aire de escape, que pulveriza el aire circulante a una superficie que va a limpiarse a través de un orificio de succión que aspira materiales extraños dejando escapar el aire usando un motor de succión y un propulsor dentro del robot de limpieza.
En particular, la presente invención se refiere a un robot de limpieza según el preámbulo de la reivindicación 1 tal como se conoce por ejemplo del documento FR-A-2838323.
[Técnica anterior]
En general, un robot de limpieza limpia automáticamente una zona que va a limpiarse aspirando de manera autónoma materiales extraños tales como polvo del suelo mientras de desplaza sobre la zona que va a limpiarse sin requerir que un usuario lo opere. Cuando su alimentación por baterías está a punto de agotarse, el robot de limpieza vuelve automáticamente a su posición de carga. Tras recargarse, el robot de limpieza vuelve a la zona que se estaba limpiando y reanuda la operación de limpieza.
El robot de limpieza esta diseñado para limpiar de manera autónoma materiales extraños de la superficie que va a limpiarse mientras se desplaza sobre la zona que va a limpiarse. Sin embargo, en el caso en el que los materiales extraños están adheridos a la superficie que va a limpiarse o a una moqueta, el robot de limpieza se mueve en ocasiones a lo largo del patrón de desplazamiento en la zona que va a limpiarse sin limpiar completamente los materiales extraños.
Teniendo en cuenta los lugares de uso y la movilidad, el robot de limpieza está limitado en cuanto a su tamaño y peso. Es decir, se requiere que el robot de limpieza tenga un tamaño pequeño y un peso ligero, y no puede instalarse en el mismo un motor de succión que tenga una mayor capacidad. Puesto que la fuerza de succión es limitada, el robot de limpieza en ocasiones no elimina completamente los materiales extraños.
[Descripción]
[Problema técnico]
Un problema de este tipo es más grave en el caso de un robot de limpieza de tipo de succión a vacío, hasta el punto de que el robot de limpieza no sólo no elimina los materiales extraños aspirándolos, sino que además arrastra los materiales extraños, ampliando de ese modo la zona que debe limpiarse.
Naturalmente, con el fin de superar el problema relacionado con la fuerza de succión de un motor pequeño, se usa un sistema de cepillo de succión que tiene una unidad de succión a vacío y un cepillo. El sistema de cepillo de succión eleva los materiales extraños hacia el interior del robot de limpieza usando el cepillo y aspira el material extraño elevado usando la unidad de succión a vacío. Aunque este sistema puede eliminar los materiales extraños de una parte de superficie que va a limpiarse que el cepillo toca, los materiales extraños en otras zonas de la parte de superficie que va a limpiarse que el cepillo no toca deben aspirarse sólo mediante fuerza de succión. Por tanto, los materiales extraños no se eliminan suficientemente de las zonas de superficie que el cepillo no toca. En particular, un orificio de succión, que está situado por encima del cepillo, reduce la fuerza de succión, y por tanto los materiales extraños permanecen sobre la superficie cuando no se eliminan por el cepillo.
Tal como se describió anteriormente, aunque el sistema de cepillo de succión se realizó para superar los inconvenientes del sistema de succión a vacío, no elimina completamente los materiales extraños. Además, cuando se añade el cepillo, debe proporcionarse además un dispositivo adicional. Sin embargo, esto eleva el coste del producto y hace que su mantenimiento sea difícil.
Además, en el robot de limpieza convencional, el polvo se aspira junto con el aire a través del orificio de succión, y se captura por un colector de polvo. Cuando se elimina el polvo, el aire escapa a través de un orificio de ventilación hacia el exterior, y este flujo de aires de escape esparce los materiales extraños depositados cerca del robot de limpieza alrededor del interior de la habitación.
La presente invención se ha realizado para resolver los problemas anteriores con la técnica anterior, y por tanto un objeto de la presente invención es proporcionar un robot de limpieza que tiene una función de realimentación de aire de escape, que puede utilizar la fuerza de succión a vacío generada por un motor de succión así como aire de escape de pulverización sobre la superficie que va a limpiarse haciendo circular el aire usando el motor de succión, mejorando de ese modo la eficacia de eliminación de material extraño.
Otro objeto de la presente invención es proporcionar un robot de limpieza que tiene una función de realimentación de aire de escape, que puede eliminar materiales extraños tanto usando succión a vacío como mediante la pulverización de aire circulado, reduciendo de ese modo el tamaño de un motor de succión y reduciendo por tanto el tamaño y el peso del robot de limpieza.
Un objeto adicional de la presente invención es proporcionar un robot de limpieza que tiene una función de realimentación de aire de escape, que puede pulverizar de manera uniforme aire de escape sobre la superficie que va a limpiarse con el fin de esparcir de manera uniforme los materiales extraños de la superficie.
Otro objeto adicional de la presente invención es proporcionar un robot de limpieza que tiene una función de realimentación de aire de escape, que puede regular la cantidad del aire que va a pulverizarse, permitiendo de ese modo la limpieza eficaz de los objetos que van a limpiarse.
Otro objeto de la presente invención es proporcionar un robot de limpieza que tiene una función de realimentación de aire de escape, que puede esparcir los materiales extraños de la superficie que va a limpiarse usando aire de escape aunque evitando que los materiales extraños se dispersen, retirando de ese modo eficazmente los materiales extraños.
Un objeto adicional de la presente invención es proporcionar un robot de limpieza que tiene una función de realimentación de aire de escape, que puede evitar que el aire de escape que circula a través del motor de succión escape directamente al exterior, evitando de ese modo que el aire interior se contamine así como realizando un efecto que supera el obtenido a través del uso de un cepillo, sin usar el cepillo.
Otro objeto adicional de la presente invención es proporcionar un robot de limpieza que tiene una función de realimentación de aire de escape, que puede mejorar la trayectoria de circulación del aire que se aspira, potenciando de ese modo la eficacia de la trayectoria de circulación del aire de escape.
Todavía otro objeto de la presente invención es proporcionar un robot de limpieza que tiene una función de realimentación de aire de escape, que tiene una unidad de boquilla de pulverización y unidades de boquilla laterales con el fin de pulverizar el aire circulante hacia el centro desde la parte frontal, posterior, izquierda y derecha, de modo que los materiales extraños pueden esparcirse fácilmente desde la superficie que va a limpiarse y pueden moverse fácilmente hacia el orificio de succión, potenciando de ese modo la eficacia de la limpieza así como realizando un mejor efecto de limpieza usando una cantidad dada de potencia.
[Solución técnica]
Con el fin de lograr los objetos mencionados anteriormente, la presente invención proporciona un robot de limpieza según la reivindicación 1. Las reivindicaciones dependientes se refieren a realizaciones ventajosas.
Tal como se explicó anteriormente, el robot de limpieza de la invención puede pulverizar (o realimentar) el aire circulante, que escapa a través del motor de succión, a la unidad de succión en la parte inferior del robot de limpieza con el fin de aspirar y eliminar los materiales extraños usando tanto la fuerza de pulverización del aire circulante como la fuerza de succión del motor de succión, logrando de ese modo una fuerza de eliminación excelente.
Puesto que la invención puede aspirar y eliminar los materiales extraños usando tanto la fuerza de pulverización del aire circulante como la fuerza de succión del motor de... [Seguir leyendo]
Reivindicaciones:
1. Robot (500) de limpieza, que comprende:
una unidad (300) de succión dispuesta en una parte inferior del mismo;
un motor de succión para aspirar materiales extraños de una superficie que va a limpiarse, junto con aire, a través de la unidad de succión;
un colector (520) de polvo para capturar los materiales extraños que se aspiran, de modo que el aire, del que se eliminan los materiales extraños, escapa a través del motor de succión;
una unidad (100) de realimentación de aire de escape para alimentar el aire que escapa a través del motor de succión;
una unidad (200) de boquilla de pulverización insertada en la unidad de succión y situada en un extremo delantero de la unidad de succión, pulverizando la unidad de boquilla de pulverización el aire que se alimenta por la unidad de realimentación de aire de escape sobre la superficie que va a limpiarse;
caracterizado por una rejilla (130) giratoria conectada al colector de polvo, situada dentro del robot de limpieza, y que encierra el motor de succión en ella; y conductos (110, 120) de aire izquierdo y derecho, teniendo cada uno de ellos un extremo conectado a partes de extremo opuestas respectivas de la rejilla giratoria para comunicarse con ellas, y un extremo opuesto conectado a la unidad de boquilla de pulverización, en el que un soporte de motor de succión está dispuesto en la rejilla giratoria y soporta el motor de succión, y están formadas salidas en ambos lados de una parte inferior del soporte de motor de succión para dejar escapar el aire que se mueve a través del motor de succión.
2. Robot de limpieza según la reivindicación 1, en el que los conductos de conexión están dispuestos entre la unidad de realimentación de aire de escape y la unidad de boquilla de pulverización.
3. Robot de limpieza según la reivindicación 1, en el que están formados orificios de ventilación en los conductos de aire izquierdo y derecho, en el que están dispuestos botones que pueden abrirse en los conductos de aire izquierdo y derecho para poder controlarse desde el exterior de un cuerpo del robot, y en el que cada uno de los botones que pueden abrirse actúa para abrir o cerrar uno respectivo de los orificios de ventilación.
4. Robot de limpieza según la reivindicación 1, en el que la unidad de boquilla de pulverización incluye:
un alojamiento que tiene una pendiente en una parte de superficie inferior del mismo;
secciones de conexión dispuestas a cada lado de una parte superior del alojamiento, comunicando cada una de las secciones de conexión con un extremo distal de uno respectivo de los conductos de aire izquierdo y derecho o con uno respectivo de los conductos de conexión;
una pluralidad de guías de aire que dividen un interior del alojamiento en una pluralidad de espacios, que conducen desde las secciones de conexión en la parte superior del alojamiento hasta el interior del alojamiento que tiene la pendiente; y una pluralidad de conductos de pulverización de aire definidos por las guías de aire.
5. Robot de limpieza según la reivindicación 4, en el que la unidad de boquilla de pulverización incluye adicionalmente divisiones dispuestas en extremos inferiores de las guías de aire y situadas dentro del alojamiento de la boquilla de pulverización, en el que las divisiones bloquean un paso del aire y definen zonas de amortiguación, estando dispuesta cada una de ellas entre conductos de pulverización de aire adyacentes.
6. Robot de limpieza según la reivindicación 5, en el que la unidad de boquilla de pulverización incluye adicionalmente un regulador de pulverización para regular una cantidad del aire que va a pulverizarse mediante el ajuste del tamaño de los extremos inferiores de los conductos de pulverización de aire.
7. Robot de limpieza según la reivindicación 6, en el que el regulador de pulverización está dividido lateralmente.
8. Robot de limpieza según la reivindicación 6 ó 7, en el que el regulador de pulverización incluye:
placas de regulación de pulverización izquierda y derecha dispuestas en el exterior del alojamiento del regulador de pulverización de una forma lateralmente deslizante, teniendo cada una de las placas de regulación de pulverización izquierda y derecha orificios que pueden abrirse en una superficie inferior de la misma, teniendo los orificios que pueden abrirse un tamaño igual que el de orificios de salida;
botones de funcionamiento izquierdo y derecho de tipo un solo toque, teniendo cada uno de ellos una pendiente distal en contacto con una cualquiera de las placas de regulación de pulverización izquierda y derecha y una parte superior que sobresale fuera del robot de limpieza; y resortes de funcionamiento, teniendo cada uno de ellos una parte soportada en una cualquiera de las placas de regulación de pulverización izquierda y derecha y una parte opuesta soportada en la unidad de succión.
9. Robot de limpieza según la reivindicación 6 ó 7, en el que el regulador de pulverización incluye:
placas de regulación de pulverización izquierda y derecha dispuestas en el exterior del alojamiento del regulador de pulverización de una forma lateralmente deslizante, teniendo cada una de las placas de regulación de pulverización izquierda y derecha orificios que pueden abrirse en una superficie inferior de la misma, teniendo los orificios que pueden abrirse un tamaño igual que el de orificios de salida; y botones móviles izquierdo y derecho, teniendo cada uno de ellos un extremo conectado de manera solidaria a un extremo de una respectiva de las placas de regulación de pulverización izquierda y derecha y una parte superior que sobresale fuera del robot de limpieza.
10. Robot de limpieza según la reivindicación 1, en el que la unidad de succión incluye:
un cuerpo de unidad de succión dispuesto en un lado inferior de un cuerpo del robot de limpieza;
un rebaje de inserción para alojar la unidad de boquilla de pulverización, estando formado el rebaje de inserción en un extremo delantero del cuerpo de unidad de succión que va a situarse en un borde delantero cuando se observa en una dirección de movimiento del robot de limpieza;
un orificio de succión formado en una parte central del cuerpo de unidad de succión que va a ubicarse detrás del rebaje de inserción; y una correa anti-dispersión situada detrás del orificio de succión y que se extiende hacia abajo desde una parte posterior del cuerpo de unidad de succión.
11. Robot de limpieza según la reivindicación 1 ó 10, en el que la unidad de succión incluye unidades de boquilla laterales dispuestas en ambos lados de la misma, en el que las unidades de boquilla laterales están conectadas a la unidad de realimentación de aire de escape para dejar escapar el aire hacia el orificio de succión, en el que cada una de las unidades de boquilla laterales incluye una boquilla lateral situada en cualquier lado de la unidad de succión y que tiene un orificio de boquilla en una parte inferior de la misma, dirigiéndose el orificio de boquilla hacia la unidad de succión; y un conducto de aire auxiliar conectado en un extremo a la boquilla lateral y en un extremo opuesto a uno respectivo de los conductos de aire izquierdo y derecho de la unidad de realimentación de aire de escape.
Patentes similares o relacionadas:
Aparato de limpieza, así como accesorio para la unión a un dispositivo de base del aparato de limpieza, del 17 de Junio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Accesorio configurado como un cepillo de alfombra o como un accesorio de suelo duro para una aspiradora o como un accesorio de limpieza en mojado para […]
Estación de evacuación, del 17 de Junio de 2020, de IROBOT CORPORATION: Un robot móvil que comprende: un cuerpo configurado para atravesar una superficie y recibir residuos desde […]
Aparato de limpieza de suelos y procedimiento de funcionamiento del mismo, del 29 de Abril de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza de suelos , por ejemplo un aspirador de polvo manualmente guiado, que comprende […]
Sistema y un procedimiento para la limpieza de un suelo con un robot de limpieza, del 22 de Abril de 2020, de VORWERK & CO. INTERHOLDING GMBH: Sistema para la limpieza de un suelo - con al menos un robot de limpieza y - con medios de control para el control del robot de limpieza […]
Aparato de tratamiento de suelos dotado de traslación automática, del 4 de Marzo de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato de tratamiento de suelos dotado de traslación automática, especialmente robot de limpieza, que comprende un elemento de tratamiento de […]
Robot de limpieza con un dispositivo para detectar una colisión, del 26 de Febrero de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato de tratamiento de superficies dotado de movilidad automática, especialmente robot de limpieza, que comprende una carcasa y un dispositivo […]
Aparato electrodoméstico y procedimiento para el funcionamiento de un aparato electrodoméstico, del 5 de Febrero de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato electrodoméstico , que comprende: - al menos un acumulador de energía eléctrica diseñado para alimentar con potencia eléctrica […]
 Estación de carga, especialmente para un aparato de limpieza, del 29 de Enero de 2020, de VORWERK & CO. INTERHOLDING GMBH: Estación de carga , especialmente para un aparato de limpieza , que comprende una carcasa de dicha estación, un elemento de acometida de la red, especialmente […]
Estación de carga, especialmente para un aparato de limpieza, del 29 de Enero de 2020, de VORWERK & CO. INTERHOLDING GMBH: Estación de carga , especialmente para un aparato de limpieza , que comprende una carcasa de dicha estación, un elemento de acometida de la red, especialmente […]