ROBOT INDUSTRIAL CON TRANSMISION DE RUEDAS DENTADAS COMPACTA DE GRAN RELACION DE ENGRANAJES.
ESTA INVENCION SE REFIERE A UN SISTEMA DE ENGRANAJE COMPACTO QUE INCLUYE UN EJE DE ENTRADA (28),
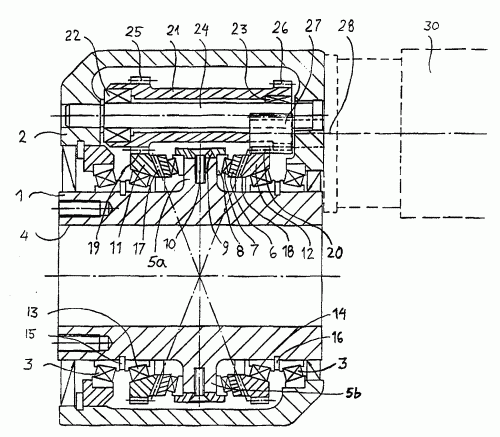
UN EJE DE SALIDA (1) Y UNA RUEDA DENTADA QUE CONECTA A AMBOS, PROMOVIENDO LA IMPULSION, EN EL QUE EL EJE DE SALIDA (1) ESTA MOVIDO POR UN MUÑON, DENTRO DEL ALOJAMIENTO DEL ENGRANAJE (2). DE ACUERDO CON LA INVENCION, EL EJE DE SALIDA (1) ES HUECO Y TIENE UNAS ESPIGAS (5 A) QUE SE EXTIENDEN RADIALMENTE HACIA FUERA EN UN PLANO NORMAL Y CADA UNA DE LAS CUALES LLEVA UNA RUEDA DENTADA (6). A CADA LADO DE LAS ESPIGAS ESTA PROVISTA, RESPECTIVAMENTE, UNA CORONA DENTADA (11, 12), UNIDA POR UN MUÑON AL EJE DE SALIDA (1) Y QUE POSEE UN ANILLO DENTADO (17, 18) ENGRANADO CON LA RUEDA DENTADA (6). CADA CORONA DENTADA TIENE TAMBIEN UN ARO CILINDRICO DENTADO (19, 20) QUE ACTUA CONJUNTAMENTE, A DIFERENTES RELACIONES DE TRANSMISION, CON SU ARO DENTADO RESPECTIVO (25, 26), QUE ESTA SITUADO EN UN EJE EXCENTRICO (21) QUE SE PROLONGA PARALELAMENTE AL EJE DE SALIDA (1) Y QUE, POR MEDIO DE UN MUÑON, GIRA DENTRO DEL ALOJAMIENTO (2), DE DONDE EL EJE EXCENTRICO (21) ES IMPULSADO POR EL EJE DE ENTRADA (28). A LA VEZ QUE EL EJE DE ENTRADA (28) GIRA, LAS ESPIGAS SON OBLIGADAS A GIRAR ALREDEDOR DEL EJE CENTRAL DEL EJE DE SALIDA (1) Y, EN CONSECUENCIA, ARRASTRAN EL EJE DE SALIDA CON UNA REDUCCION AMPLIA. EL SISTEMA DE ENGRANAJE COMPACTO ES DE ESPECIAL APLICACION PARA EL GIRO DEL BRAZO DE UN ROBOT INDUSTRIAL, EN RELACION CON EL CUERPO DEL ROBOT.
Tipo: Resumen de patente/invención.
Solicitante: ASEA BROWN BOVERI AB.
Nacionalidad solicitante: Suecia.
Dirección: ,721 83 VASTERAS.
Inventor/es: ARBRINK, RICHARD.
Fecha de Publicación: .
Fecha Solicitud PCT: 8 de Julio de 1996.
Fecha Concesión Europea: 4 de Octubre de 2001.
Clasificación Internacional de Patentes:
- B25J18/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Brazos.
- F16H1/28 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16H TRANSMISIONES. › F16H 1/00 Transmisiones de engranajes para transmitir un movimiento rotativo (particulares para transmitir un movimiento rotativo con relación de velocidad variable, o para invertir el movimiento rotativo F16H 3/00). › con engranajes con movimiento orbital.
- F16H37/04 F16H […] › F16H 37/00 Combinaciones de transmisiones mecánicas no previstas anteriormente F16H 1/00 - F16H 35/00 (combinaciones de una transmisión mecánica con acoplamientos hidraúlicos o transmisión por fluido F16H 47/00). › Combinaciónes únicamente de transmisiones de engranajes (F16H 37/06 tiene prioridad).
Países PCT: Alemania, España, Francia, Reino Unido, Italia, Suecia, Oficina Europea de Patentes.
Patentes similares o relacionadas:
Soporte planetario, del 6 de Mayo de 2020, de Flender GmbH: Soporte planetario, mostrando un buje del lado de la transmisión , una cara externa del lado de la transmisión (2a), una cara del lado de la […]
Eje planetario, del 26 de Febrero de 2020, de Flender GmbH: Eje planetario para un engranaje planetario, caracterizado porque el eje planetario presenta una zona de brazo entre una zona de sujeción para la […]
 Engranaje planetario para un aerogenerador con ruedas planetarias apoyadas de manera deslizante, del 27 de Noviembre de 2019, de Miba Gleitlager Austria GmbH: Engranaje planetario para un aerogenerador, que comprende:
una rueda principal ;
una corona ;
un portasatélites […]
Engranaje planetario para un aerogenerador con ruedas planetarias apoyadas de manera deslizante, del 27 de Noviembre de 2019, de Miba Gleitlager Austria GmbH: Engranaje planetario para un aerogenerador, que comprende:
una rueda principal ;
una corona ;
un portasatélites […]
Sistema de orientación para una estación remota de armas, del 13 de Septiembre de 2019, de ESCRIBANO Y MECHANICAL & ENGINEERING, S.L: Sistema de orientación para una estación remota de armas. La invención se refiere a un sistema de orientación para una estación remota de armas, del tipo […]
Unidad de reducción epicicloidal para aplicaciones con una salida ascendente, del 10 de Junio de 2019, de COMER INDUSTRIES S.P.A: Unidad de reducción epicicloidal para aplicaciones con una salida ascendente, que comprende una carcasa para contener por lo menos una primera etapa de reducción epicicloidal […]
Transeje de dos velocidades para vehículo eléctrico, del 6 de Junio de 2019, de Guangzhou Sunmile Dynamic Technologies Corp., LTD: Un transeje de dos velocidades para un vehículo eléctrico, que comprende: un motor eléctrico y un transeje que puede accionarse por […]
Sistema de engranajes para una bicicleta de doble potencia, del 28 de Mayo de 2019, de Freeflow Technologies Limited: Un sistema de engranajes de vehículo que comprende una primera entrada de rotación , una segunda entrada de rotación y una salida de rotación, […]
Una caja de engranajes epicicloidal y una turbina eólica que comprende al menos una caja de engranajes epicicloidal, del 13 de Junio de 2018, de VESTAS WIND SYSTEMS A/S: Una caja de engranajes epicicloidal que comprende una carcasa de caja de engranajes, una o más partes de la caja de engranajes […]