Robot delta que presenta una disposición especial de las rótulas.
Robot delta que consiste en
- Una placa base fija (1) y
- Al menos tres accionadores (2) fijados sobre la misma,
que
- están conectados a al menos un brazo (31) en cada caso, de los cuales al menos uno está conectado al otro extremodel mismo por medio de una rótula (5), en cada caso a
- Dos barras (32) en cada caso, transcurriendo dichas barras paralelas entre sí y estando el otro extremo de las mismasconectado por medio de una rótula adicional (5) a
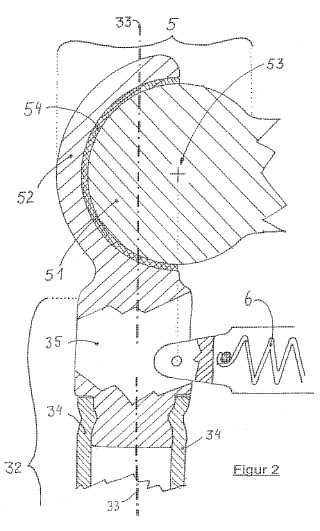
- una placa paralela móvil (4), estando cada rótula (5) compuesta por un cabezal del segmento de rótula (51) y unsegmento de rótula esférico (52) designados de forma complementaria a la misma, y las dos rótulas (5) adyacentes entresí en barras paralelas (32) están orientadas simétricamente especulares entre sí, estando presionado cada segmento derótula esférico (52) sobre el cabezal del segmento de rótula correspondiente (51) tensando al menos un elementopermanentemente elástico (6) entre dos barras (32), que están orientadas paralelas entre sí, y estando el punto central(53) de al menos un cabezal del segmento de rótula (51) dispuesto con respecto al eje de soporte longitudinal (33) de labarra (32), que se conecta a la rótula (5), y
- la dirección de desplazamiento apunta de forma central más allá del segmento de rótula hueca (52), y
- la cantidad de desplazamiento es siempre más pequeño que el radio del cabezal de segmento de rótula (51),
caracterizado porque
los ejes de giro de los elementos permanentemente elásticos (6),
- se disponen fuera del eje de soporte longitudinal (33) y
- se disponen sobre una línea de conexión recta entre los centros de giro (53) de las dos rótulas (5) en los dos extremosde la barra respectiva (32),
- tienen la misma distancia en cada caso de los cabezales de los segmentos de rótula (51) que están adyacentes a losmismos.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/DE2009/001772.
Solicitante: ELAU GMBH.
Nacionalidad solicitante: Alemania.
Dirección: Dillberg 12-16 97828 Marktheidenfeld ALEMANIA.
Inventor/es: HOMBACH,CHRISTIAN, BÖTTCHER,FELIX.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J17/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 17/00 Uniones. › Uniones articuladas.
PDF original: ES-2403345_T3.pdf
Fragmento de la descripción:
Robot delta que presenta una disposicion especial de las rotulas [0001] La invencion se refiere a un robot delta, que comprende una placa base fija y al menos tres accionadores sujetos sobre la misma, que estan en cada caso conectados a al menos un brazo, de los cuales al menos uno esta conectado en el otro extremo del mismo a dos barras mediante una rotula en cada caso, transcurriendo dichas barras paralelas entre sí y en el otro extremo de las mismas estan conectados, a traves de una rotula adicionalmente en cada caso, a una placa movil paralela, en la que cada rotula tiene un cabezal del segmento de rotula y un segmento de rotula hueca disenados complementarios a la misma, y las dos rotulas, que se unen entre sí sobre barras paralelas, se orientan simetricamente de forma especular entre sf, y cada segmento de rotula hueca se presiona sobre el cabezal del segmento de rotula correspondiente haciendo tension en al menos un e lemento permanentemente elastico entre dos barras que son paralelas entre sf, estando el punto central de al menos un cabezal del segmento de rotula desplazado con respecto al eje de soporte longitudinal de la barra, que esta conectado a la rotula, y apuntando la direccion de desplazamiento mas alla del segmento de rotula hueca y la cantidad del desplazamiento que es siempre mas pequeno que el radio de la cabeza de segmento esferico. Se conoce un robot delta de este tipo a partir de la patente de Estados Unidos US-8-6 419211. [0002] En la tecnica anterior, los robots delta han probado su valor en particular para el embalaje de productos de alimentacion de poco ligero, ya que permiten una dinamica extremadamente alta de hasta tres operaciones de embalaje por segundo. [0003] Los primeros robots delta comprendían tres brazos. Sin embargo, tambien se conocen variantes con cuatro y mas brazos. [0004] En la tecnica anterior, la mayor parte de los robots delta consiste en una placa base en la que se montan tres servoaccionamientos. En el eje de salida de los mismos, se fija un brazo (tambien conocido como brazo superior) , en el que, como quot;brazo inferiorquot;, se montan de forma giratoria dos barras paralelas, que, a su vez, estan en conexion giratoria con la placa paralela. Mediante una rotacion de los servoaccionadores, se puede maniobrar con la placa paralela en cualquier posicion deseada del espacio de trabajo disponible. Ya que los brazos inferiores consisten en barras paralelas, la placa paralela siempre se mueve por lo tanto (como su nombre sugiere) paralela a la placa base. [0005] En principio, puede usarse una junta universal o una junta de cardan para la conexion articulada de las barras a los brazos y a la placa paralela. Sin embargo, los maximos angulos de giro que pueden alcanzarse de este modo son considerablemente inferiores en comparacion con una rotula, que consiste en un cabezal del segmento de rotula y un segmento de rotula hueca complementario que se desliza sobre el mismo. Por lo tanto, ya que las rotulas tienen un angulo de giro mas grande y permiten de este modo un espacio de trabajo mayor, en este momento son el diseno de junta que mas se usa para robots delta. [0006] En la tecnica anterior, la patente de Estados Unidos 5.333.514, de Osamu Toyama, desvela un robot delta, cuyo el brazo inferior consiste en pares de barras paralelas, en cuyos extremos se disponen segmentos de rotula hueca, tambien denominados cojinetes esfericos o cazoletas de rotula, y se presionan sobre los cabezales del segmento de rotula en el brazo o en la placa paralela en la que los extremos de los dos brazos con forma de barras paralelas se mantienen unidos mediante resortes de tension. Entonces, el segmento de rotula hueca se desplaza sobre el cabezal de rotula de la misma manera que un cojinete deslizante. Una ventaja considerable de este cojinete es que se produce un area de contacto similar en cada angulo. [0007] Las diversas representaciones de las barras en la patente de Estados Unidos 5.333.514 muestran la misma anchura desde todos los puntos de vista, a partir de lo cual se desprende que las barras tienen una seccion transversal redondeada. En la figura 5 de la patente, se puede observar que las barras son un tubo de pared fina. [0008] Aquí, tambien se muestra que las superficies de abertura de los segmentos de rotula hueca de las rotulas se orientan en una extension del eje central. [0009] Sin embargo, a partir de esta disposicion (que es típica en la tecnica anterior) , surge como la desventaja principal que las barras se cargan asimetricamente y, por lo tanto, pueden doblarse facilmente, como se explica a continuacion: en un tubo, el eje central es tambien el eje de soporte longitudinal. Si una fuerza actua en la direccion de este eje de soporte longitudinal, entonces el tubo se carga con precision simetricamente y las fuerzas se distribuyen por todas las zonas de la pared del tubo y se alcanza la capacidad de carga maxima del tubo.
Sin embargo, en cuanto la carga migra del eje de soporte longitudinal, parte de la pared de tubo se carga mucho mas que otras partes, y se colapsa, aunque no se haya alcanzado aun la resistencia de carga maxima del tubo.
Ya que, en una rotula, las fuerzas se distribuyen mas alla de la superficie de contacto, en la disposicion que se ha mencionado anteriormente, las fuerzas de compresion que se introducen, a traves de un cabezal de rotula y el segmento de rotula hueca correspondiente, en una barra no se transmiten de forma desventajosa al eje de soporte longitudinal, sino fuera del mismo. Por lo tanto, sobre aquel lado en el que se disponeel segmentode rotula hueca, el tubo se colapsara ya en cargas de compresion que esten por debajo de la capacidad maxima de carga del tubo.
Par a compe nsar e ste efecto, la idea s e puede tomar del documento d e Estad os Unidos 6.4 19.211, específicamente delafigura1, de la dimensionde los dos tubos algomas grandes uno conrespecto al otro que se sugiere por ladistancia delas rotulas entresf. Como resultado, el eje desoporte del tubo ya transcurre a traves del punto central geometrico y giratorio del cabezal de rotula y el segmento de rotula hueca, sino adicionalmente quot;hacia afueraquot; y, por lo tanto, a traves de la porcion del segmento de rotula hueca que recibe las fuerzas del tubo.
Enlas aplicaciones practicas de los robots deltasegun este principio, los tubos deparedes muyfinas tambien muestran una resistencia de carga mayor y una vida util mas larga.
Sin embargo, una desventaja considerable del documento US 6.419.211 es que los resortes, u otros elementos permanentemente elasticos, que mantienen los segmentos de rotula hueca sobre los segmentos de la cabeza de rotula, siempre estan articulados en el centro de una barra redonda o tubular. Ya que, con la disposicion de barras redondas segun el documento US 6.419.211, su eje central ya no transcurre a traves de los puntos centrales de los segmentos del cabezal de rotula, sino que se dispone fuera deesta lfnea, los ejes de girodelos resortes yanose apoyan sobre una lfnea a traves de los centros de rotacion de los segmentos del cabezal rotula.
Esto tiene la consecuencia de que, sobre un giro de las barras, la distancia entre los puntos de articulacion de los resortes cambia, de tal forma que los resortes tienen que expandirseycontraerse repetidamente, lo que, en vista del gran numero de ciclos de carga de un robot delta, conduce a la rotura prematura de los cuellos de los resortes.
Frente a estos antecedentes, el objeto de la invencion, en un robot delta, es disponer la conexion entre una rotula y una barra de los brazos inferiores de tal forma que las fuerzas de traccion o de compresion se distribuyan de manera uniforme sobre la barra sin momentos flectores adicionales, de modo que los resortes u otros elementos elasticos para sostener juntas las barras que se disponen en paralelo alcancen una vista util lo mas larga posible.
Como solucion, la invencion presenta un robot delta segun la reivindicacion 1, en el que los ejes de giro de los elementos permanentementeelasticos se disponen fuera del eje de soporte longitudinal y sobre una lfneade conexion directa entre los ce ntros de rotacion de las dos rotulas en ambos extremos de la barra en cada caso, y en cada caso tienen la misma distancia desde los cabezales del segmento de rotula que estan adyacentes a ellas.
El merito decisivo de la invencion es, por lo tanto, haberreconocido que la geometrfa de la disposicion segun el documento US 6.419.211 con barras que se desplazan en cierta medida con respecto al cabezal del segmento de rotula, con cada movimiento de las barras con respecto al cabezal de rotula, expanden en cierta medida los resortes, que se articulan de manera central sobre las barras, y despues los contraen de nuevo. El numero de estos ciclos de carga, que es típicame nte alto para u n robot d elta, conduce entonces inmediatamente... [Seguir leyendo]
Reivindicaciones:
1. Robot delta que consiste en
- Una placa base fija (1) y
- Al menos tres accionadores (2) fijados sobre la misma, que
- estan conectados a al menos un brazo (31) en cada caso, de los cuales al menos uno esta conectado al otro extremo del mismo por medio de una rotula (5) , en cada caso a
- Dos barras (32) en cada caso, transcurriendo dichas barras paralelas entre sí y estando el otro extremo de las mismas conectado por medio de una rotula adicional (5) a
- una placa paralela movil (4) , estando cada rotula (5) compuesta por un cabezal del segmento de rotula (51) yun segmento de rotula esferico (52) designados de forma complementaria a la misma, y las dos rotulas (5) adyacentes entre sí en barras paralelas (32) estan orientadas simetricamente especulares entre sf, estando presionado cada segmento de rotula esferico (52) sobre el cabezal del segmento de rotula correspondiente (51) tensando al menos un elemento permanentemente elastico (6) entredos barras (32) , queestan orientadas paralelas entre sf, y estando el puntocentral
(53) de al menos un cabezal del segmento de rotula (51) dispuesto con respecto al eje de soporte longitudinal (33) de la barra (32) , que se conecta a la rotula (5) , y
- la direccion de desplazamiento apunta de forma central mas alla del segmento de rotula hueca (52) , y
- la cantidad de desplazamiento es siempre mas pequeno que el radio del cabezal de segmento de rotula (51) ,
aaraalerzzadoºporque los ejes de giro de los elementos permanentemente elasticos (6) ,
- se disponen fuera del eje de soporte longitudinal (33) y
- se disponen sobre una lfnea de conexion recta entre los centros de giro (53) de las dos rotulas (5) en los dos extremos de la barra respectiva (32) ,
-tienen la mismadistancia en cada casode los cabezales de los segmentosderotula (51) que estanadyacentes a los mismos.
2. Robot delta segun la reivindicacion 1, ºaaraalerzzado porqueel elemento permanentemente elastico (6) es un resorte o una banda de goma o una banda plastica.
3. Robot delta segun una de las reivindicaciones anteriores, ºaaraalerzzadº ºporque el accionador (2) es un servomotor rotativo o un motor lineal o un motor por etapas u otro accionador electrico o un cilindro hidraulico o un cilindro neumatico o un piezocristal.
4. Robot delta segun unade las reivindicaciones anteriores, ºaaraalerzzadoºporque la seccion transversal de la barra (32) cambia a lo largo de su longitud y el eje de soporte longitudinal (33) conecta los centroides de todas las secciones transversales de la barra (32) entre sf.
5. Robot delta segun una de las reivindicaciones anteriores, ºaaraalerzzado porque la cantidad de desplazamiento es mayor de un cuarto y es inferior a tres cuartos del radio del cabezal del segmento de rotula (51) .
6. Robot delta segun una de las reivindicaciones anteriores, ºaaraalerzzadoºporque la cantid ad de desplazamiento corresponde a la distancia entre el punto central (53) yel centroide delareabajo la curvade los componentes de la fuerza de traccion y de compresion que transcurren en el sentido del eje de soporte longitudinal (33) en funcion del radio que se extienden perpendicular al eje de soporte longitudinal (33) .
7. Robot delta segun una de las reivindicaciones anteriores, ºaaraalerzzadoºporque el area de abertura del segmento de rotula hueca (52) es un plano que se extiende paralelo al eje de soporte longitudinal (33) .
8. Robot delta segun una de las reivindicaciones anteriores, ºaaraalerzzadoºporque el segmento de rotula hueca (52) engloba del cabezal del segmento de rotula (51) con un angulo de 180º con respecto al punto central (53) .
9. Robot delta segun la reivindicacion 6, ºaaraalerzzadoporque el angulo circundante es inferior a 180º.
10. Robot delta segun una de las reivindicaciones anteriores, ºaaraalerzzadº ºporque el segmento de rotula hueca (52) comprende dos aberturas y engloba el cabezal del segmento de rotula (51) de manera aproximadamente anular.
11. Robot d elta se gun u na d e la s r eivindicaciones anteriores, ºaaraa lerzzado porque la superficie interna de un segmento de rotula hueca (52) yºo el cabezal del segmento de rotula correspondiente (51) se introduce con una capa de plastico elastica y muy lubrica (54) .
12. Robot delta segun una de las reivindicaciones anteriores, ºaaraalerzzado ºporque la capa de plastico (54) esta montada en el segmento de rotula hueca (52) como una insercion de plastico.
13. Robot delta segun una de las reivindicaciones anteriores, ºaaraalerzzado ºporque se dispone un segmento de rotula hueca (52) en un extremo de al menos una barra (32) .
14. Robot delta se gun una d e las reivindicaciones anteriores, ºaaraa lerzzado porque se dispone u n cabezal de l segmento de rotula (51) en un extremo de al menos una barra (32) .
15. Robot delta segun una de las reivindicaciones anteriores, ºaaraalerzzado ºporque los barras (32) presentan el mismo perfil en seccion transversal a lo largo de toda su longitud.
16. Robot delta segun la reivindicacion 12, ºaaraalerzzado ºporque al menos una barra (32) consiste en la mayor parte en un cilindro hueco (34) .
17. Robot delta segun la reivindicacion 12, ºaaraalerzzadoºporque el perfil
- es un rectangulo, o
-un ovalo, o
-una elipse
cuyo eje longitudinal esta orientado en el sentido del elemento permanentemente elastico (6) .
18. Robot delta segun una de las reivindicaciones anteriores, ºaaraalerzzado ºporque al menos una barra (32) esta fabricada de
- plastico reforzado con fibra de vidrio (PRFº) , yºo
- plastico reforzado con fibra de carbono (PRFC) , yºo
- plastico con otras mezclas, yºo - otro plastico, yºo
- chapa, yºo
- espuma metalica, yºo
- un metal con otra forma, yºo
- tubo de bambu, yºo
- madera yºo - otro material natural.
19. Robot delta segun la reivindicacion 16, ºaaraalerzzadoºporque al menos la superficie externade la barra (32) consiste en acero inoxidable resistente a la corrosion u otro material que sea resistente al detergentes agresivosy otros medios agresivos.
20. Robot delta segun la reivindicacion 6, ºaaraalerzzado porque el segmento de rotula hueca (52) se extiende por un cilindro hueco con el mismo radio interno.
21. Robot delta segun una de las reiv indicaciones anteriores, a araalerzzado ºporque al menos un par de barras adyacentes (32) se ex tiende mas alla de las dos ro tulas (5) y, s obre es ta e xtension, un se gundo elemen to permanentemente elastico (6) co necta a mbas barras (32) , y l a f uerza de t raccion d e este s egundo elemento permanentemente elastic o (6) corresp onde aproximadamente a la fuerza de traccio n de l primer elemento permanentemente elastico (6) .
FIGURA 1
FIGURA 2
Patentes similares o relacionadas:
Aparatos y procedimientos para el accionamiento remoto de puntos de control, del 24 de Junio de 2020, de Stevenson, Robert L: Aparato para el accionamiento remoto de un punto de control , que comprende: un elemento alargado que tiene un primer extremo y un […]
DISPOSITIVO DE ACOPLAMIENTO ENTRE UN ROBOT Y UN CABEZAL, del 26 de Marzo de 2020, de ASOCIACIÓN CENTRO TECNOLÓGICO CEIT-IK4: Dispositivo de acoplamiento entre un robot y un cabezal (H, H') que actúa sobre una superficie de trabajo (S), que comprende un cuerpo(10,10')que […]
Dispositivo rociador de material y un procedimiento para controlar la dirección de rociado del dispositivo, del 4 de Septiembre de 2019, de TIKKURILA OYJ: Herramienta de trabajo controlable de forma remota, en la que la herramienta de trabajo comprende: - un módulo de herramienta de trabajo fijo o modificable […]
 Sistema de manipulación de productos alimenticios, del 28 de Agosto de 2019, de FORMAX, INC: Sistema de transporte para llenar envases con productos alimenticios , que comprende:
a) un transportador principal que mueve los productos alimenticios […]
Sistema de manipulación de productos alimenticios, del 28 de Agosto de 2019, de FORMAX, INC: Sistema de transporte para llenar envases con productos alimenticios , que comprende:
a) un transportador principal que mueve los productos alimenticios […]
Mecanismo de conformidad pasiva, del 24 de Julio de 2019, de Delta Electronics, Inc: Un mecanismo (10, 10') de conformidad pasiva, que comprende: un miembro de fijación; una base instalada sobre el miembro de fijación, […]
 Sistema de motorización con par adaptado para articulación con medios de arrollamiento cruzados, del 26 de Junio de 2019, de THALES: Dispositivo de motorización que comprende:
• dos cilindros de arrollamiento (1a, 1b) sustancialmente paralelos, unos medios de […]
Sistema de motorización con par adaptado para articulación con medios de arrollamiento cruzados, del 26 de Junio de 2019, de THALES: Dispositivo de motorización que comprende:
• dos cilindros de arrollamiento (1a, 1b) sustancialmente paralelos, unos medios de […]
Articulación para un robot, del 13 de Mayo de 2019, de Universal Robots A/S: Una articulación para un robot que comprende un freno de seguridad que comprende un solenoide que con la activación del freno desplaza un trinquete acoplándolo […]
Robot humanoide que implementa una articulación esférica, del 8 de Mayo de 2019, de Bia: Robot humanoide, que comprende dos elementos conectados por una articulación esférica con tres grados de libertad en rotación, […]