Procedimientos de ayuda a la salida de estacionamiento de un vehículo.
Procedimiento de ayuda para la salida de estacionamiento de un vehículo (1),
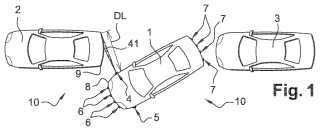
que comprende una evaluación de la distancia (DL) entre dicho vehículo (1) y un vehículo adyacente (2) y una condición de final de ayuda, caracterizado porque la variación de distancia evaluada (DL) es un parámetro de determinación de dicha condición de final de ayuda y porque la variación de distancia evaluada (DL) que realiza dicha condición de final de ayuda implica al menos una inversión en el sentido de la variación de la distancia evaluada (DL) en el curso de un período durante el cual el sentido de desplazamiento de dicho vehículo (1) permanece siendo el mismo.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10155554.
Solicitante: PEUGEOT CITROEN AUTOMOBILES SA.
Nacionalidad solicitante: Francia.
Dirección: ROUTE DE GISY 78140 VELIZY-VILLACOUBLAY FRANCIA.
Inventor/es: Pallier,Denis.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60W30/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60W CONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › B60W 30/00 Funciones de sistemas de ayuda a la conducción de vehículos terrestres no relacionados con el control de una subunidad particular, p.ej. sistemas que utilizan el control conjugado de varias subunidades del vehículo. › Maniobra automática de estacionamiento.
- B62D1/28 B […] › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 1/00 Mando de la dirección, es decir, medios para producir un cambio en la dirección del vehículo. › no mecánicos.
- B62D15/02 B62D […] › B62D 15/00 Direcciones no previstas en otro lugar. › Indicadores de dirección.
- G08G1/16 FISICA. › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › Sistemas anticolisión.
PDF original: ES-2385141_T3.pdf
Fragmento de la descripción:
Procedimiento de ayuda la salida de estacionamiento de un vehículo La invención se refiere al dominio de los procedimientos de ayuda al estacionamiento de un vehículo y, en particular, los procedimientos de ayuda a la salida de estacionamiento de un vehículo. El procedimiento de ayuda a la salida de estacionamiento de un vehículo ayuda a un conductor a sacar su vehículo del sitio de estacionamiento en el cual su vehículo esta aparcado y puede incluso llegar hasta a sacar el vehículo de su sitio de estacionamiento en lugar del conductor. Este procedimiento de ayuda se activa, generalmente, a solicitud del conductor.
Una vez terminada la maniobra de salida del vehículo fuera de su sitio de estacionamiento, el procedimiento devuelve el mando al conductor por razones de seguridad, ya que no es un sistema de pilotaje automatico del vehículo en una situación de circulación normal, principalmente cuando el vehículo circula sobre una calzada. Por un lado, el procedimiento de ayuda no tiene que devolver el mando demasiado pronto al conductor ya que, si no, este corre el riesgo de deber, al menos en ciertos casos, terminar en parte la maniobra de salida del vehículo fuera de su sitio de estacionamiento, lo que le sera fastidioso y volvera tanto menos atractivo su procedimiento de ayuda, con un riesgo anadido de chocar con un vehículo aparcado en su proximidad. Por otra parte, el procedimiento de ayuda no tiene que devolver el mando demasiado tarde al conductor ya que, si no, este corre el riesgo de no darse cuenta mas que una vez que su vehículo se ha integrado de nuevo en la circulación y no poder reaccionar forzosamente a tiempo en caso de un suceso diffcil, como por ejemplo un coche que surge bruscamente en su cercanfa.
Segun una tecnica anterior, por ejemplo descrita en la solicitud de patente alemana DE 102007029773, se preve una condición de final de ayuda que permite devolver el mando al conductor una vez que la maniobra de salida de estacionamiento ha terminado. La condición de final de ayuda prevista (parrafo 17) es un umbral de velocidad de rodadura de un valor de 15 km/h. El dispositivo supone que cuando el vehículo rueda a una velocidad que ha sobrepasado este umbral, la maniobra de salida del sitio de estacionamiento esta terminada. Para un umbral de velocidad de 15 km/h, esto es, en efecto, probable; no obstante, en este estado, el vehículo esta ya claramente metido en la calzada y en caso de sobrevenir inopinadamente un vehículo que llegue rapidamente por detras, existe el riesgo de ser demasiado tarde para permitir el evitar la colisión.
Segun la invención, este uso de un umbral de velocidad parece insuficiente. En efecto, o bien si el umbral de velocidad es elevado, y la maniobra esta sin duda terminada pero el mando sea devuelto al conductor de manera suficientemente tardía como para que tenga un riesgo notable de colisión en caso de sobrevenir un elemento imprevisto, o bien si el umbral de velocidad es bajo, y si el riesgo en materia de seguridad disminuye, lo es en detrimento de la ergonomfa del procedimiento de ayuda que tiene riesgo de generar falsas alarmas que obliguen al conductor a terminar la maniobra o a reiniciar el procedimiento de ayuda.
El documento de patente alemana DE 10 2007 036251 A1, considerada como la tecnica anterior mas próxima, revela el preambulo de la reivindicación 1.
La invención busca una condición de final de ayuda que permita a la vez, por un lado, no devolver el mando al conductor mas que cuando la maniobras este virtualmente terminada, es decir cuando el conductor ya no corra, razonablemente, riesgo de chocar con otro vehículo aparcado cerca del suyo y, por otro lado, suficientemente pronto despues del final de la maniobra de salida como para que el vehículo no se meta demasiado en la calzada y no este ya demasiado implicado en la circulación, de manera que permita al conductor reaccionar mejor a un suceso diffcil o imprevisto. Preferentemente, se trata de que procedimiento de ayuda devuelva el mando lo mas temprano posible despues del final de la maniobra, idealmente tan pronto como la maniobra esta terminada, al conductor del vehículo. Para ello, la invención utiliza la variación de la distancia entre vehículos, es decir, la variación de una distancia o de varias distancias entre, por un lado, el vehículo al que el procedimiento de ayuda segun la invención esta haciendo salir de su sitio de estacionamiento y, por toro lado, un vehículo adyacente, es decir, un vehículo que este aparcado justo al lado del vehículo ayudado por este procedimiento de ayuda. La utilización de este parametro de variación de distancia entre vehículos permite devolver el mando al conductor mas pronto que la sola utilización de un umbral de velocidad. Preferentemente, no se utiliza umbral de velocidad alguno en el procedimiento de ayuda segun la invención.
Segun la invención, esta previsto un procedimiento de ayuda para la salida de estacionamiento de un vehículo, que comprende una evaluación de la distancia entre dicho vehículo y un vehículo adyacente y una condición de final de ayuda, caracterizado porque la variación de distancia evaluada es un parametro de determinación de dicha condición de final de ayuda.
Preferentemente, la variación de distancia evaluada que realiza dicha condición de final de ayuda corresponde a la estimación de una supresión de riesgo de colisión entre la esquina del vehículo y la esquina del vehículo adyacente que son las mas próximas una de la otra al final de la salida de estacionamiento. Asf, cuando, en caso de recuperación del mando del vehículo por el conductor en aquel momento, este hace avanzar el vehículo, ya no hay riesgo a priori de chocar con el vehículo situado justo al lado de su vehículo, justo delante de su vehículo para una salida por delante de un sitio de estacionamiento en lfnea. En el caso de un estacionamiento en lfnea con salida por delante del vehículo fuera de su sitio de estacionamiento, el riesgo de choque esta practicamente suprimido, para el
caso de un estacionamiento a la derecha de la calzada en el sentido de la marcha cuando la esquina delantera derecha del vehículo del conductor ha sobrepasado la esquina trasera izquierda del vehículo aparcado justo delante, para el caso de un estacionamiento a la izquierda de la calzada en el sentido de la marcha cuando la esquina delantera izquierda del vehículo del conductor ha sobrepasado la esquina trasera derecha del vehículo aparcado justo delante. El final de la salida de estacionamiento significa que la parte delantera del vehículo va a poder salir completamente del sitio de estacionamiento sin otra inversión del sentido de pilotaje del sistema de dirección cuando el procedimiento de ayuda pilota el sistema de dirección del vehículo. El final de la salida de estacionamiento es, pues, la fase de la salida del vehículo despues de la ultima inversión del sentido de pilotaje del sistema de dirección del vehículo.
Preferentemente, dicha variación de distancia evaluada determina la condición de final de ayuda. Esta variación de distancia es, entonces, el parametro principal, el parametro esencial, que va a determinar la condición de final de ayuda, incluso si esta variación de distancia pueda ser modulada o corregida por otros parametros. Para ciertas variaciones de distancia, el procedimiento de ayuda considera que la condición de final de ayuda esta realizada, mientras que para otras variaciones de distancia, el procedimiento de ayuda considera que la condición de final de ayuda no esta realizada o aun no realizada. Esta variación de distancia puede, tambien, ser el sólo y unico parametro de determinación de la condición de final de ayuda.
Preferentemente, la variación de distancia evaluada esta modulada por el valor del angulo de giro del volante de dicho vehículo. En una primera realización, el efecto del angulo de giro del volante esta anulado en la medida en la que la distancia entre vehículos es recalculada corrigiendo el efecto del angulo de giro del volante, es decir, analizando la variación de la distancia entre vehículos que habrfa sido si el vehículo avanzase en lfnea recta. En una segunda realización, se tiene en cuenta simplemente el angulo de giro del volante que modifica la variación de distancia entre vehículos con respecto a una progresión en lfnea recta. Con la evolución del angulo de giro del volante, se anticipa su influencia sobre la curva de variación de la distancia entre vehículos que habrfa debido realizar la condición de final de ayuda si el vehículo hubiera progresado en lfnea recta, y se adapta la condición de final de asistencia a la nueva curva... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de ayuda para la salida de estacionamiento de un vehículo (1) , que comprende una evaluación de la distancia (DL) entre dicho vehículo (1) y un vehículo adyacente (2) y una condición de final de ayuda, caracterizado porque la variación de distancia evaluada (DL) es un parametro de determinación de dicha condición de final de ayuda y porque la variación de distancia evaluada (DL) que realiza dicha condición de final de ayuda implica al menos una inversión en el sentido de la variación de la distancia evaluada (DL) en el curso de un perfodo durante el cual el sentido de desplazamiento de dicho vehículo (1) permanece siendo el mismo.
2. Procedimiento de ayuda segun la reivindicación 1, caracterizado porque dicha variación de distancia evaluada (DL) determina la condición de final de ayuda.
3. Procedimiento de ayuda segun una cualquiera de las reivindicaciones precedentes, caracterizado porque el procedimiento de ayuda es un procedimiento de ayuda para la salida de estacionamiento en lfnea.
4. Procedimiento de ayuda segun la reivindicación 3, caracterizado porque el vehículo adyacente (2) es el vehículo aparcado justo delante de dicho vehículo (1) .
5. Procedimiento de ayuda segun una cualquiera de las reivindicaciones precedentes, caracterizado porque el procedimiento de ayuda pilota el sistema de dirección de dicho vehículo (1) y porque la realización de la condición de final de ayuda devuelve el mando al conductor del vehículo (1) .
6. Procedimiento de ayuda segun una cualquiera de las reivindicaciones precedentes, caracterizado porque la variación de distancia evaluada (DL) que realiza dicha condición de final de ayuda corresponde a la estimación de una supresión de riesgo de colisión entre la esquina (8) de dicho vehículo (1) y la esquina (9) del vehículo adyacente (2) que son las mas próximas una de la otra al final de la salida de estacionamiento.
7. Procedimiento de ayuda segun una cualquiera de las reivindicaciones precedentes, caracterizado porque, para realizar dicha condición de final de ayuda, el nuevo sentido de variación de la distancia evaluada (DL) , despues de dicha inversión, debe permanecer siendo el mismo durante una longitud mfnima de desplazamiento de dicho vehículo (1) excluyendo que dicha inversión no hay sido causada mas que por variaciones de forma exterior del vehículo adyacente (2) .
8. Procedimiento de ayuda segun la reivindicación 7, caracterizado porque dicha longitud mfnima es determinada a partir de una estimación de las variaciones de forma exterior del vehículo adyacente (2) realizada durante el desarrollo del procedimiento de ayuda.
9. Procedimiento de ayuda segun una cualquiera de las reivindicaciones precedentes, caracterizado porque el sentido de desplazamiento de dicho vehículo (1) es determinado a partir de al menos un captador de velocidad de rotación de rueda senalada de dicho vehículo (1) .
10. Procedimiento de ayuda segun una cualquiera de las reivindicaciones precedentes, caracterizado porque el final del procedimiento de ayuda es provocado por la transmisión, sobre la red electrica de a bordo de dicho vehículo (1) , de una información proveniente de un captador de distancia y destinado al sistema de pilotaje de dirección de dicho vehículo (1) .
11. Procedimiento de ayuda segun la reivindicación 10, caracterizado porque dicha transmisión de información consiste en dejar de enviar el valor de la distancia evaluada (DL) hacia el sistema de pilotaje de dirección de dicho vehículo (1) .
12. Procedimiento de ayuda segun una cualquiera de las reivindicaciones precedentes, caracterizado porque la variación de distancia evaluada (DL) es modulada por el valor del angulo de giro del volante de dicho vehículo (1) .
13. Procedimiento de ayuda segun una cualquiera de las reivindicaciones precedentes, caracterizado porque la variación de distancia evaluada (DL) es medida por al menos un captador de distancia lateral de dicho vehículo (1) .
14. Procedimiento de ayuda segun una cualquiera de las reivindicaciones precedentes, caracterizado porque la variación de distancia evaluada (DL) es medida por al menos un captador de distancia por ultrasonidos.
Patentes similares o relacionadas:
PLATAFORMA OMNIDIRECCIONAL, del 11 de Febrero de 2019, de UNIVERSITAT POLITECNICA DE CATALUNYA: Plataforma omnidireccional. Plataforma que comprende un primer módulo con una primera rueda motriz y una segunda rueda motriz enfrentadas […]
PLATAFORMA OMNIDIRECCIONAL Y TRANSPORTADOR OMNIDIRECCIONAL, del 29 de Enero de 2019, de UNIVERSITAT POLITECNICA DE CATALUNYA: Plataforma omnidireccional y transportador omnidireccional. Plataforma omnidireccional que comprende un primer módulo con al menos de una […]
Sistema de control de vehículo para controlar la dirección del vehículo, del 21 de Septiembre de 2016, de Thunder Power New Energy Vehicle Development Company Limited: Un sistema de control para controlar la dirección de un aparato de conducción, en el que el sistema está caracterizado por: un dispositivo de proyección […]
Procedimiento para la conducción autónoma en un túnel de lavado y automóvil correspondiente, del 11 de Marzo de 2015, de AUDI AG: Procedimiento para la conducción autónoma de un automóvil en un túnel de lavado, caracterizado por: - la detección de un pasillo del túnel de lavado, - la detección […]
PROCEDIMIENTO Y APARATO PARA LA UTILIZACIÓN DE UN SISTEMA AUTOMÁTICO DE SEGUIMIENTO DEL CARRIL PARA MANTENER LA SEPARACIÓN LATERAL DEL VEHÍCULO, del 15 de Diciembre de 2011, de VOLVO TECHNOLOGY CORPORATION: Un procedimiento para pilotar un vehículo que comprende: - la detección de objetos en carriles adyacentes a un carril ocupado por el vehículo que utiliza un sistema de seguimiento […]
 PROCEDIMIENTO Y DISPOSITIVO PARA DIRIGIR UN VEHICULO SIN CONTACTO CON LA VIA, del 21 de Mayo de 2010, de MITSUBISHI HEAVY INDUSTRIES, LTD.: Un vehículo que no entra en contacto con un raíl que comprende:
ruedas ;
un cuerpo principal del vehículo soportado por dichas ruedas ; […]
PROCEDIMIENTO Y DISPOSITIVO PARA DIRIGIR UN VEHICULO SIN CONTACTO CON LA VIA, del 21 de Mayo de 2010, de MITSUBISHI HEAVY INDUSTRIES, LTD.: Un vehículo que no entra en contacto con un raíl que comprende:
ruedas ;
un cuerpo principal del vehículo soportado por dichas ruedas ; […]
PROCEDIMIENTO Y DISPOSITIVO PARA CONDUCIR UN VEHICULO AUTOMOVIL HACIA UNA POSICION DE DESTINO., del 1 de Abril de 2007, de DAIMLERCHRYSLER AG: Procedimiento para conducir un vehículo automóvil hacia una posición de destino; a este efecto, el vehículo automóvil es colocado en una posición de partida, situada cerca […]
 DISPOSITIVO AUXILIAR DE ESTACIONAMIENTO Y PROCEDIMIENTO PARA LA ASISTENCIA AL ESTACIONAMIENTO, del 1 de Mayo de 2009, de ROBERT BOSCH GMBH: Dispositivo auxiliar de estacionamiento para un vehículo automóvil , comprendiendo el dispositivo auxiliar de estacionamiento una unidad detectora […]
DISPOSITIVO AUXILIAR DE ESTACIONAMIENTO Y PROCEDIMIENTO PARA LA ASISTENCIA AL ESTACIONAMIENTO, del 1 de Mayo de 2009, de ROBERT BOSCH GMBH: Dispositivo auxiliar de estacionamiento para un vehículo automóvil , comprendiendo el dispositivo auxiliar de estacionamiento una unidad detectora […]