Procedimiento para un sistema de navegación global por satélite.
Un procedimiento pars un sistema de navegacien global por satelite con al menos dos portadoras (4),
a partir delas cuales se forma una combinación lineal por una estación (15) de referencia para estimar un sesgo de fase y decódigo de diferencias simples entre satelites de la combinación lineal, en el que el sesgo estimado es proporcionadoa un receptor [nevi! (5), permitiendo que el receptor móvil calcule la misma combinación lineal, sustraiga el sesgo dela combinación lineal y determine las ambiguedades enteras de fase,
caracterizado porque
el sesgo de diferencias simples entre satelites de una combinación lineal Unica, conservadora de la geometria y sinefecto ionosferico, de las señales de código y de fase de al menos dos portadoras (4) se determine usando unrequisito de discriminación máxima de la combinación o un requisito de ruido minimo para la combinación lineal.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2009/054855.
Solicitante: DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V..
Inventor/es: HENKEL,PATRICK.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S5/14 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
PDF original: ES-2413064_T3.pdf
Fragmento de la descripción:
Procedimiento para un sistema de navegación glObal :por satélite.
La presente invención versa acerca de un procedimiento para un sistema de navegación global por satélite con al menos dos portadoras a partir de las cuales una estación de referencia fonna una combinación lineal para estimar un sesgo de fase y de código de diferencias simples entre satélites, proporcionandose el sesgo estimado a un receptor móvil, que calcula la misma combinación lineal para sustraer el sesgo de la combinación lineal y para determinar las ambigüedades enteras de fase.
La invención versa, ademas, acerca de una estación IJe referencia, un dispositivo móvil de navegación y un producto de soporte lógico.
Tal procedimiento se conoce por GABOR, M. y NEREM, S., "SateUite--satellite single difference phase calibration as applied to ambiguity resolulion", Navigation, Vol. 49, N° 4, pp. 223-242, 2002 (2) . El procedimiento conocido usa la combinación Melbourne-Wübbena ('" MW) [1] sin efElCIo ionosférico. En una estación de referencia se estima un sesgo de fase y de código de diferencias simples ('" SD) entre satélites, proporcionándose el sesgo estimado a un receptor móvil, que calcula la misma combinación lineal, sustrae el sesgo de la combinación lineal y detennina las ambigüedades enteras de fase.
Se usa la combinación MW de fonna generalizada para el posicionamiento preciSO de punlos (= PPP) para detenninar las ambigüedades de banda ancha. La combinación MW es una combinación código-portadora de L111_2 sin geometria que elimina el retardo troposfériCO, el ct.~sfase horario y fuentes adicionales de error no dispersivos. Se usan la combinación MW y una combinación adicional de fase de lllL2 sin efecto ionosférico, en particular en [2], 13] Y [4]. para determinar estimaciones de sesgo de fase de l'.
Sin embargo, existen varias desllentajas de este procedimiento conocido. En primer lugar, los sesgos de fase de II y L2 no pueden ser separados de los sesgos de código de L 1 Y L2; es decir, la estimación del sesgo de fase de II también induye sesgos ponderados de código de L 1 Y L2. En segundo lugar, la combinación Melbourne-Wübbena se refiere a una combinación lineal sin geometría sin efecto ionosférico que elimina el intervalo y que no puede usarse para el posicionamiento. En principio, pueden encontrarse combinaciones conservadoras de la geometrla y sin efedo ionosférico en las que son aplicables los sesgos de II y L2 del procedimiento conocido, pero estas aplicaciones son combinaciones de banda estrecha con una longitud de onda, como máximo, de 10, 7 cm. Esta longitud de onda más bien baja impide cualquier resolución fiable de las ambigüedades en el receptor móvil.
BANVllLE, S. y otros: "Satellite and Receiver Phase Bias Catibration for Undifferenced Ambiguity Resotution", PROC. OF THE 2008 NATIONAl TECHNICAl MEE:TING OF THE ION, SAN DIEGO, CA, USA, 28 de enero de 2008 . pp. 711 -719, da un procedimiento para estimm los sesgos del satélite y el receptor para un posicionamiento preciso de puntos.
GABOR, M. J. Y otros: "GPS Carrier Phase AmbiguitV Resolution Using Satellite • Salellile Single Differences" PROCEEDINGS OF THE INSTITUTE OF NAVlGATION (ION) GPS. 17 de septiembre de 1999, pp. 1569-1578, es otra publicación relativa a un procedimiento en el que· una red distribuida globalmente de receptores usa diferencias simples entre satélites para eliminar los sesgos de los receptores y para detenninar los sesgos de los satélites.
HENKEL, P. Y otros: "Three frequency linear combinations for Galileo" POStTIONING, NAVIGATION AND COMMUNICATION. 2007. WPNC'07. 4TH WORKSHOP ON, IEEE. PI , 1 de marzo de 2007, pp. 239-245, da a conocer diversas combinaciones código-portadora mixtas sin efecto ionosférico de mediciones de diferencias simples entre satélites.
Partiendo de esta técnica relacionada, la presente invención busca proporcionar procedimientos mejorados para estimar los sesgos.
Este objeto se logra por medio de un procedimiento que tiene las características de las reivindicaciones independientes. En las reivindicaciones dependientes de las mismas se especifican realizaciones y mejoras.
En una realización del procedimiento, el sesgo estimado es un sesgo de diferencias simples entre satélites de una llnica combinación conservadora de la geometría y sin efeclo ionosférico de las señales de código y de fase de las al menos dos portadoras, y se detennina usando un requisito de discriminación maxima de la combinación o un requisito de ruido minimo para la combinación lineal. Usar tal combinación permite que la estación de referencia estime sesgos que sean directamente aplicables para el posicionamiento.
la estación de referencia, usando una estimación de minimos cuadrados, que minimiza los errores en el proceso de estimación, obtiene ventajosamente un sesgo mixto código-portadora sin efecto ionosférico, ambigüedades enteras de fase y retardos cenitales troposféricos con humedad.
El requisito de discriminación de la combinación puede definirse como la relación de la longitud de onda de la combinación y la suma ponderada formada por el sesgo de la combinación y por la desviación tipica de la combinación, Maximizando tal requisito de discriminación de la combinación, se escoge la combinación de tal modo que el error de la combinación y el sesgo de la combinación sean tan pequeñas como resulte posible con respecto a la longitud de onda de la combinación, dando como resultado pequenos errores relativos en la determinación del sesgo de la combinación.
En un procedimiento simplificado, el requisito de discriminación de la combinación se define como la relación de la longitud de onda de la combinación y la desviación típica del ruido de la combinación mixta de código-portadora. Tal requisito de discriminación de la combinación sigue dando como resultado una determinación robusta de los sesgos de la combinación lineal.
Para permitir que el receptor juzgue la fiabilidad del sesgo, la estación de referencia transmite al receptor móvil el 10 sesgo junto con la desviación típica asociada con el sl~sgo de la combinación.
La estimación de los sesgos puede mejorar adicionalrnente si se usan una combinación adicional conservadora de la geometría y sin efecto ionosférico de diferencias temporales de tas mediciones o tas diferencias temporales de combinaciones conservadoras de la geometria y sin efecto ionosférico para determinar los sesgos, cumpliendo los coeficientes de ponderación de la combinación a{licional el requisito de que la combinación adicional y la combinación conservadora de la geometrla y sin efecto ionosférico de las seflales de código y de fase de al menos dos portadoras carezcan de correlación.
En las realizaciones de los procedimientos, el recept () r móvil determina ventajosamente sus ambigüedades enteras mediante un remuestreo secuencial y una descorrelacíón de enteros tras la eliminación de las estimaciones de sesgo. Tal enfoque tiene una tasa de éxito mas alta qlJe la determinación directa de las ambigüedades enteras.
$e dan a conocer ventajas y propiedades adicionales de la presente invención en la descripción siguiente, en la que se explican con detalle realizaciones ejemplares de la presente invención basadas en los dibujos:
la Figura 1 muestra un sistema de navegación global por satélite y un receptor para el sistema de navegación global por satélite;
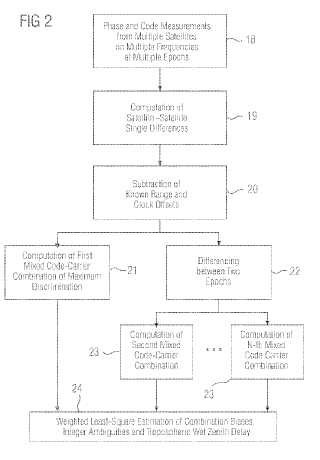
la Figura 2 muestra un diagrama de flujo de un p\"ocedimiento que usa una combinación lineal código-portadora sin efecto ionosférico y una combinadón adicional código-portadora, sin correlación, de mediciones de diferencia temporal para una eslim¡~ción de sesgo en una única estación de referencia;
la Figura 3 muestra una estimación de sesgos dl~ SO entre satélites de la combinación lineal código-portadora sin efecto ionosférico (11 '" 3, 215 m) en una única estación de referencia;
la Figura 4 demuestra el beneficio de una combinación adicional código-portadora L 1-ES sin efecto ionosférico, sin correlación, de mediciones de difi~rencia temporal para una estimación de sesgo en una única estación de referencia:
la Figura S muestra una estimación de sesgos de SO de la combinación código-portadora sin efecto ionosférico de discriminación maxima (11 '" 3, 215 m) : intelValo de landa reducido a 5 min, con auxilio de una combinación código-portadora sin efecto ionosferico, de diferencia temporal, de ruido mlnimo;
la Figura 6 muestra una estimación de sesgos de fase de diferencias simples con mediciones no combinadas de fase y código en L 1, E5a, E5b Y ESe en una única estación de referencia (tasas de la estimación iono,... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento para un sistema de navegación global por satélite con al manos dos portadoras (4) , a partir de las cuales se forma una combinación lineal por una 6stación (15) de referencia para estimar un sesgo de fase y de código de cflferencias simples entre satéliles de la combin<:lción lineal, en el que el sesgo esllmado es proporcionado a un receptor móvil (5) , permitiendo que el receptor mOviI calcule la misma combinación lineal, sustraiga el S8Sg0 de la combinación linaal y determine las ambigüedades enteras de fase,
caraclerizado porque el sesgo de diferencias simplBs entra satélites de una combinación lineal única, conservadora de la geometria y sin efecto ionosférico, de las sel"iales de código y de fase de al menos dos portadoras (04) se detarmina usando un requisilo de discriminación máxima de la combinación o un requisito de ruido mínimo para la combinación lineal.
2. El procedimiento segun la reivindicación 1
en el que la estación (15) de referencia, usando una estimación de mínimos cuadrados, obtiene un sesgo mixto de código-portadora sin efecto ionosférico, ambigÜedades enteras de fase y retardos cenitales troposféricos con hlJTledad.
3. El procedimianlo sagún las reivindicaciones 1 o 2
en el que el requisito de discriminación de la combinación se define como la relaelón de la longitud de onda de la combinación y la suma ponderada formada por el sesgo de la combinación y por la desviación tlpica de la combinación.
4. El procedimiento segun la reivindicación 3
en el que el requisilo de discriminación de la combinación se define como la relación de la longitud de onda de la combinación y la desviación tipíca del ruido de la combinación mixta de coogo-portadOfa.
5. El procecimiento segun las reivindicaciones 1 a 4
en el que la estaciÓfl (1 5) de referencia transmite el sesgo junto con la desviación tlplca asociada con el sesgo.
6. El procedimiento segun una cualquiera de las reivindicaciones 1 a 5
en el que se usan una combinación adicional conservadora de la geometrla y sin efecto ionosférico de diferencias temporales de las mediciones o las diferencias temp (.) rales de combinaciones conservadoras de la geometrfa y sin efecto ionosférico para determinar los sesgos, en el que los coeficientes de ponderacion de la combinación adicional cumplen el ret:¡uisito de que la combinación adicional \j la combinación según una cualquiera de las reivindicaciones 1 a 5 carezcan de correlación.
7. Una estación de referencia para un sistema de navegación global por satélite adaptado para estimar el sesgo de fase y de código caracterizada porque la estación (15) de referencia esta dispuesta paro ejecutar un procedimiento según una cualquiera de las reivindicaciones 1 a 6.
8. Un procedimiento para un sistema de navegación global por satelite con una pluralidad de portadoras en el que un dispositivo móvil (5) de navegación recibe un se:'90 de una estación (15) de referencia y usa el sesgo para determinar ambigüedades enteras de fase caracterizado porque el dispositivo móvil (5) de navegaciOn usa la misma combinación lineal q.Je usa la estación (15) de referencia mientras ejecuta un prOCedimiento segun una cualquiera de las reivindicaciones 1 a 6, y porque el dispositivo móvil
(5) de navegaciÓfl sustrae de la combinación lineal los sesgos recibidos por la estac:iÓfl (1 5) de referencia y determina las ambigOedades de fase.
9. Un dispositivo movU de navegación para una nav~lación global por satélite adaptado para usar un sesgo de fase y de código caracterizado porque el dispositivo está dispuesto para ejecutar un procedimiento según la reivindicación 8.
10. Un producto de soporte lógico para fines de navegación caracterizado porque el producto de soporte lógico comprende código de programa para implementar uno cualquiera de los procedimientos según las reivindicación 1 a 6 y 8.
Patentes similares o relacionadas:
Sistema de posicionamiento para satélite artificial geoestacionario, del 18 de Marzo de 2020, de Sky Perfect JSAT Corporation: Sistema de medición de posición para un satélite artificial geoestacionario , comprendiendo el sistema: dos o más antenas, que incluyen, como […]
Ubicación de la posición para sistemas de comunicación inalámbrica, del 11 de Marzo de 2020, de QUALCOMM INCORPORATED: Un procedimiento, que comprende: recibir una señal piloto de ubicación de la posición desde una estación base en una estación móvil , la señal piloto de ubicación […]
Formato de trama de difusión de tiempo de salida (TOD), del 4 de Marzo de 2020, de QUALCOMM INCORPORATED: Un procedimiento de medición de alcance entre una o más estaciones inalámbricas, STA, y un primer punto de acceso, AP, el procedimiento que comprende: […]
SISTEMA DE AJUSTE FINO PARA LOCALIZACIÓN Y DEFINICIÓN DE OBJETOS MEDIANTE UNA DISPOSICIÓN DE ANTENAS RFID, del 12 de Febrero de 2020, de GUTIÉRREZ GONZÁLEZ, Noel: 1. Sistema de ajuste fino para la localización y definición de objetos mediante una disposición de antenas RFID, y donde dichos objetos pueden estar parados o […]
Sistema y método para proporcionar servicios basados en ubicación a bordo de una aeronave, del 13 de Noviembre de 2019, de THE BOEING COMPANY: Sistema para proporcionar servicios basados en ubicación a bordo de una aeronave para usuarios que tienen dispositivos […]
 Ubicación de la posición para sistemas de comunicación inalámbrica, del 18 de Septiembre de 2019, de QUALCOMM INCORPORATED: Un procedimiento, que comprende:
establecer una sesión de recepción y/o de transmisión discontinuas entre una estación móvil y una célula de servicio de […]
Ubicación de la posición para sistemas de comunicación inalámbrica, del 18 de Septiembre de 2019, de QUALCOMM INCORPORATED: Un procedimiento, que comprende:
establecer una sesión de recepción y/o de transmisión discontinuas entre una estación móvil y una célula de servicio de […]
 Supervisión y/o establecimiento de protocolos de una posición de una herramienta en una caja de ascensor, del 28 de Agosto de 2019, de INVENTIO AG: Sistema para la supervisión y/o creación de protocolo de una posición de una herramienta en una caja de ascensor , comprendiendo el sistema: […]
Supervisión y/o establecimiento de protocolos de una posición de una herramienta en una caja de ascensor, del 28 de Agosto de 2019, de INVENTIO AG: Sistema para la supervisión y/o creación de protocolo de una posición de una herramienta en una caja de ascensor , comprendiendo el sistema: […]
Medición de temporización fina segura, del 14 de Agosto de 2019, de QUALCOMM INCORPORATED: Un aparato para proporcionar un intercambio de medición de temporización fina, FTM, segura que comprende: medios para obtener un valor de token seguro inicial y […]