PROCEDIMIENTO Y SISTEMA DE LOCALIZACIÓN DE UN BLANCO QUE RESPONDE EN MODO C EN UN SISTEMA DE INTERROGACIÓN-RESPUESTA (IFF).
- Procedimiento de determinación de la posición de uno o más blancos mediante una antena de barrido de tipo IFF,
teniendo la antena una dirección de apuntar dada, comprendiendo dicho procedimiento en el transcurso de una interrogación IFF una etapa en el transcurso de la cual el calculador de misión del sistema IFF combina al menos tres parámetros representativos de la posición del o los blancos, de la del portador y la dirección de apuntar del haz de la antena para localizar el blanco, caracterizado porque los tres parámetros son la distancia D del blanco al portador, la altitud A del blanco y la Apf del portador equipado con la antena IFF y el valor de telemetría del blanco, obteniéndose dicha altitud A por recepción de una respuesta tras dicha interrogación IFF y porque comprende las siguientes etapas: - determinar el círculo C1 que resulta de la intersección de la esfera iso-distancia sobre la cual se puede encontrar el blanco y de un plano sensiblemente paralelo al plano vertical del portador equipado con la antena IFF. - determinar el círculo C2 procedente de la intersección del plano iso-altitud del blanco y de la esfera isodistancia, - realizar la intersección de los dos círculos C1 y C2 para obtener las coordenadas del blanco
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E03100883.
Solicitante: THALES.
Nacionalidad solicitante: Francia.
Dirección: 173, BOULEVARD HAUSSMANN 75008 PARIS FRANCIA.
Inventor/es: ROZE,ThierryThales Intellectual Property, Trin,Jean-MarcThales Intellectual Property.
Fecha de Publicación: .
Fecha Solicitud PCT: 2 de Abril de 2003.
Clasificación Internacional de Patentes:
- G01S13/78 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › discriminando entre diferentes clases de blancos, p. ej. identificación amigo-enemigo (radar-IFF) (G01S 13/75, G01S 13/79 tiene prioridad).
- G01S5/12 G01S […] › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › mediante la coordinación de líneas de posición de forma diferente, p. ej. hiperbólicas, circulares, elípticas o radiales.
Clasificación PCT:
Clasificación antigua:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2356900_T3.pdf
Fragmento de la descripción:
La presente invención se refiere a un procedimiento y un sistema que permite especialmente localizar un blanco con la ayuda de un portador equipado con una antena de dirección de apuntar dada, el blanco y el portador comunican entre sí por un sistema de interrogación-respuesta de tipo IFF (abreviatura anglosajona de “Identification Friend or Foe”).
Se aplica, por ejemplo en el campo de la aeronáutica, para un sistema IFF embarcado también denominado radar 5 segundario, que tiene una función de gestionar las interrogaciones-respuestas IFF.
La localización y la identificación de una aeronave distante necesitan dos radares. El radar primario permite localizar el blanco y el radar secundario, o IFF, identificarlo. La correlación de estas dos informaciones (localización e identificación) es inmediata cuando la antena primaria y la antena secundaria están acopladas. Tal funcionamiento se utiliza habitualmente para las estaciones de suelo y cuando los radares son de barrido mecánico. 10
La evolución tecnológica en el campo de las antenas ha permitido, especialmente, desarrollar antenas de barrido electrónico. La antena es entonces fija y la dirección de apuntar del haz se obtiene mediante desfasadores electrónicos que tienen por función desviar los haces. El radar primario y el radar secundario son entonces independientes uno de otro y la correlación de las dos fuentes de información se hace más delicada.
La transmisión por el sistema IFF de las informaciones de localización y de identificación con el calculador principal del 15 portador, permite asociarlas a las informaciones de localización obtenidas por el radar primario.
El documento que lleva por título “3D monopulse localization IFF interrogator” XP009002916 Database accession nº 30800100 describe un procedimiento que utiliza 4 dipolos que generan una interrogación en un cono de apuntar muy estrecho de algunos grados.
La patente FR – A 2 730 567 se refiere al funcionamiento de un sistema IFF de barrido electrónico. 20
La patente US 6 278 396 describe un sistema de autocolisión.
La patente US 6 782 450 se refiere a un procedimiento pasivo y un dispositivo para evitar las colisiones de aeronaves.
El objeto de la invención se refiere a un procedimiento pasivo y un dispositivo que permiten localizar un blanco en el espacio, en el transcurso de un proceso de interrogación de tipo IFF y utilizando una antena de dirección de apuntar dada, tal como una antena de barrido electrónico. 25
La invención se refiere a un procedimiento para determinar la posición de uno o más blancos mediante una antena de tipo IFF, teniendo la antena una dirección de apuntar dada, comprendiendo dicho procedimiento en el transcurso de una interrogación IFF una etapa en el transcurso de la cual el calculador de misión del sistema IFF combina al menos tres parámetros representativos de la posición del o los blancos, de la del portador y la dirección de apuntar del haz de la antena para localizar el blanco, caracterizado porque los tres parámetros utilizados son por ejemplo la distancia D del 30 blanco al portador, la altitud A del blanco y la Apf del portador equipado con la antena IFF y el valor de telemetría del blanco, obteniéndose dicha altitud A por recepción de una respuesta tras dicha interrogación IFF y porque comprende al menos las siguientes etapas:
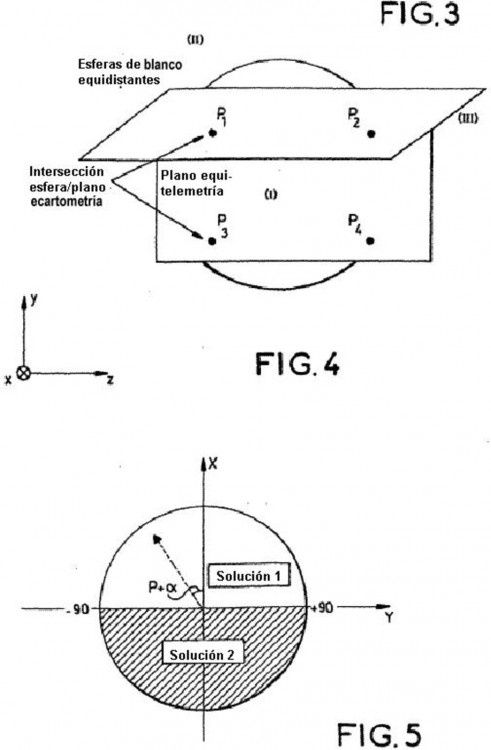
- determinar el círculo C1 que resulta de la intersección de la esfera iso-distancia sobre la cual se puede encontrar el blanco y de un plano sensiblemente paralelo al plano vertical del portador equipado con la antena 35 IFF.
- determinar el círculo C2 procedente de la intersección del plano iso-altitud del blanco y de la esfera iso-distancia,
- realizar la intersección de los dos círculos C1 y C2 para obtener las coordenadas del blanco.
El modo de interrogación del portador hacia el blanco es, por ejemplo, un modo IFF tal como el modo C. 40
La invención se refiere también a un sistema de localización de uno o más blancos por un portador equipado con una antena de dirección de apuntar dada o radar secundario caracterizado porque comprende al menos un radar primario y un sistema IFF que gobierna el radar secundario IFF, adaptado para aplicar al menos una de las características del procedimiento expuesto anteriormente.
El objeto de la invención ofrece especialmente las siguientes ventajas: 45
- Una localización más precisa del blanco, no permitiendo los sistemas de la técnica anterior más que una localización teórica y aproximada del blanco basada en la zona de apuntar de la antena.
- La posibilidad de obtener de manera precisa el sitio y el acimut real del blanco.
Otras ventajas y características de la presente invención se pondrán de manifiesto en la siguiente descripción en relación con los dibujos anexos que representan: 50
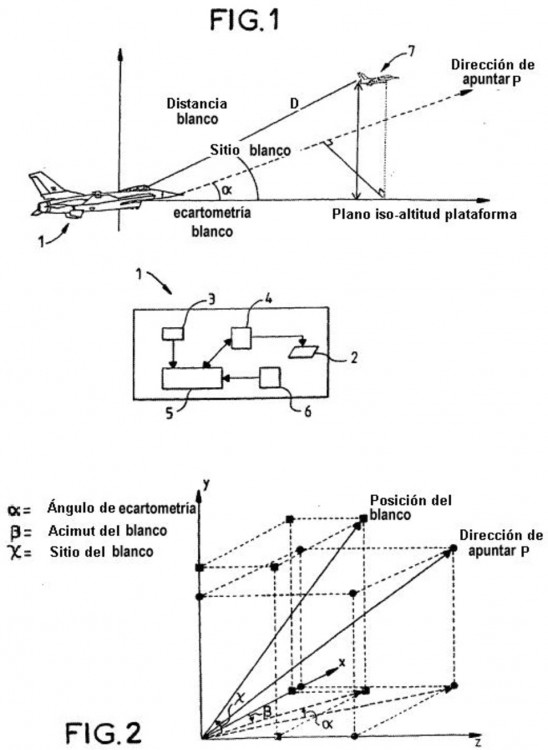
- La figura 1 es un ejemplo de sistema de localización,
- La figura 2, diferentes parámetros utilizados para determinar informaciones de localización del blanco,
- La figura 3, las posibles posiciones del blanco,
- La figura 4, la “referencia avión”,
- La figura 5 una solución para despejar la indeterminación del valor de X.
Con el fin de comprender mejor el objeto de la presente invención, la siguiente descripción dada a título ilustrativo y en modo alguno limitativo se refiere a un sistema que comprende un blanco a localizar y un portador (avión o plataforma) 5 equipado con una antena de barrido electrónico.
Al ser conocidas Las antenas de barrido electrónico por el Experto en la técnica, y no ser objeto de la invención, su arquitectura no se detallará,
El procedimiento se aplica tanto para detectar un blanco que se ha identificado, como para la identificación de objetos o de aparatos que se encuentran en una zona dada del espacio. 10
El sistema de localización representado en la figura 1 comprende por ejemplo, los siguientes elementos: un portador 1 o avión equipado con una antena electrónica de barrido 2 de dirección de apuntar dada que constituye el radar secundario o IFF que tiene especialmente por función identificar el blanco, un radar primario 3 que tiene especialmente por función permitir la localización del blanco, un sistema IFF 4 que gobierna el radar secundario. Comprende asimismo un calculador de misión 5 adaptado por ejemplo para correlacionar las informaciones procedentes del radar 15 primario y del radar secundario con el fin de identificar de manera precisa el blanco 7 a identificar y un altímetro 6. El radar primario 3, el sistema IFF 4 y el altímetro 6 está conectados con el calculador de misión mediante conexiones clásicas conocidas por el Experto en la técnica. El portador comprende también todos los dispositivos habitualmente utilizados en el campo de la IFF.
El calculador de misión 5 recupera, por ejemplo, las informaciones del radar primario y las informaciones procedentes 20 del sistema IFF. Correlaciona a continuación las informaciones de localización procedentes de estos dos radares para emitir hacia el piloto una información completa en el terminal u blanco (La información completa comprende por ejemplo, la posición exacta del blanco, su identificación, etc.).
El sistema IFF del portador, por ejemplo
- apunta la antena hacia el blanco definido por el calculador de misión, 25
- emite interrogaciones especificadas por ejemplo por el calculador de misión tal como una interrogación IFF,
- recibe y descodifica las respuestas del blanco,
- determina la distancia (por cálculo del tiempo de propagación por ejemplo), la altitud (por ejemplo con la ayuda de la respuesta en modo C del blanco) y el azimut (ejecutando las etapas del procedimiento según la invención por ejemplo) del blanco, 30
- calcula la localización del blanco,
- y a continuación transmite estas informaciones al calculador de misión.
El blanco 7 a identificar posee, por ejemplo, un contestador IFF no representado que descodifica las interrogaciones recibidas y que emiten las respuestas correspondientes “a la redonda”. El contestador está constituido por un sistema IFF contestador 8, antenas emisoras/receptoras 8 y un codificador de altitud 10 o altímetro conocidos por el Experto en 35 la técnica.
El sistema IFF del blanco traduce por ejemplo, la altitud del blanco en código de modo C... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de determinación de la posición de uno o más blancos mediante una antena de barrido de tipo IFF, teniendo la antena una dirección de apuntar dada, comprendiendo dicho procedimiento en el transcurso de una interrogación IFF una etapa en el transcurso de la cual el calculador de misión del sistema IFF combina al menos tres parámetros representativos de la posición del o los blancos, de la del portador y la dirección de apuntar del haz de la 5 antena para localizar el blanco, caracterizado porque los tres parámetros son la distancia D del blanco al portador, la altitud A del blanco y la Apf del portador equipado con la antena IFF y el valor de telemetría del blanco, obteniéndose dicha altitud A por recepción de una respuesta tras dicha interrogación IFF y porque comprende las siguientes etapas:
- determinar el círculo C1 que resulta de la intersección de la esfera iso-distancia sobre la cual se puede encontrar el blanco y de un plano sensiblemente paralelo al plano vertical del portador equipado con la antena 10 IFF.
- determinar el círculo C2 procedente de la intersección del plano iso-altitud del blanco y de la esfera iso-distancia,
- realizar la intersección de los dos círculos C1 y C2 para obtener las coordenadas del blanco.
2. Procedimiento según la reivindicación 1 caracterizado porque las coordenadas del blanco son dadas por las 15 siguientes relaciones:
3. Procedimiento según la reivindicación 2 caracterizado porque comprende una etapa en la cual se determinan las coordenadas en x de la siguiente manera
20
4. Procedimiento según cualquiera de las reivindicaciones 1 a 3 caracterizado porque el modo de interrogación del portador hacia el blanco es un modo IFF, modo C.
5. Sistema de localización de uno o más blancos por un portador equipado con una antena de dirección de apuntar dada o radar secundario (2) caracterizado porque comprende al menos un radar primario (3) y un sistema IFF (4) en conexión con el radar secundario (2) y adaptado para aplicar al menos una de las características del procedimiento 25 según las reivindicaciones 1 a 4.
Patentes similares o relacionadas:
Sistema de posicionamiento para satélite artificial geoestacionario, del 18 de Marzo de 2020, de Sky Perfect JSAT Corporation: Sistema de medición de posición para un satélite artificial geoestacionario , comprendiendo el sistema: dos o más antenas, que incluyen, como […]
Procedimiento y sistema de localización distribuida PHDOA, PWDOA, de fuentes emisoras, del 22 de Enero de 2020, de THALES: Procedimiento de localización de al menos una fuente S electromagnética en el seno de una red de comunicación que comprende al menos dos sensores […]
 Procedimiento de determinación de una dirección a un objeto emisor de señal, del 25 de Diciembre de 2019, de SAAB AB: Un procedimiento de determinación de una dirección a un objeto emisor de señal basado en tierra por medio de una plataforma que comprende al menos dos antenas (31, […]
Procedimiento de determinación de una dirección a un objeto emisor de señal, del 25 de Diciembre de 2019, de SAAB AB: Un procedimiento de determinación de una dirección a un objeto emisor de señal basado en tierra por medio de una plataforma que comprende al menos dos antenas (31, […]
Procedimiento para localizar fuentes de emisión de pulsos electromagnéticos en un entorno que comprende reflectores, del 4 de Diciembre de 2019, de THALES: Procedimiento para localizar al menos dos fuentes (Ei) de emisión de pulsos electromagnéticos en un entorno, comprendiendo dicho entorno al menos dos […]
Procedimiento de localización de fuentes de emisión de impulsos electromagnéticos, del 30 de Octubre de 2019, de THALES: Procedimiento de localización de al menos dos fuentes (S1,..., Sn) de emisión de impulsos electromagnéticos, perteneciendo cada fuente (S1,..., Sn) a una […]
Procedimiento de localización de fuentes de emisión de impulsos electromagnéticos en un entorno que comprende reflectores, del 30 de Octubre de 2019, de THALES: Procedimiento de localización de al menos dos fuentes (E1, E2) de emisión de impulsos electromagnéticos en un entorno, comprendiendo el entorno al menos dos reflectores (S1, […]
Procedimiento para determinar una disposición de al menos dos sensores y red de sensores, del 2 de Octubre de 2019, de Siemens Mobility GmbH: Procedimiento para determinar una disposición de al menos dos sensores entre sí, en el que se detecta un objeto en movimiento por medio de […]
Protocolo FTM con ángulo de llegada y ángulo de salida, del 14 de Agosto de 2019, de QUALCOMM INCORPORATED: Un procedimiento para realizar una operación de alcance entre un primer dispositivo (D1) y un segundo dispositivo (D2), siendo realizado […]