Procedimiento y sistema de estimación de una trayectoria de un móvil.
Procedimiento de estimación de una trayectoria de un móvil (3) en un entorno real de navegación que comprende,
la facilitación (E20), por una herramienta de simulación numérica (M2) que modela el móvil en este entorno, mandoscinemáticos (C11, C12) a un simulador de movimientos (2) que embarca el móvil y a un blanco (4) representativo deun objetivo que hay que alcanzar por el móvil, siendo alimentada (E 10) la citada herramienta de simulación pormandos de gobierno (P) facilitados por un calculador (33) del citado móvil y facilitando, en respuesta a estos mandosde gobierno, puntos (X) de la trayectoria, comprendiendo el citado procedimiento de estimación, además:
- en la detección (F10) de un acontecimiento representativo de un rebasamiento o de un cambio de un primerobjetivo designado para este móvil, una fase de posicionamiento (φ1) asociada a un segundo objetivo designadopara este móvil, que comprende:
- la comparación (F46) de posiciones ejecutadas por el simulador de movimientos, en respuesta a primerosmandos cinemáticos de transición, con una primera posición de consigna predeterminada, y la activación de unprimer marcador (f1) cuando se detecte una posición sensiblemente igual a la primera posición de consigna;
- la comparación (F56) de posiciones ejecutadas por el blanco, en respuesta a segundos mandos cinemáticos detransición, con una segunda posición de consigna predeterminada, y la activación de un segundo marcador (f2)cuando se detecte una posición sensiblemente igual a la segunda posición de consigna;
- cuando los primero y segundo marcadores son activados, una etapa de evaluación de una diferencia entre elmando cinemático corriente facilitado al simulador de movimientos y el mando cinemática corriente facilitado alblanco por la herramienta de simulación numérica; y
- si esta diferencia es inferior a un umbral determinado (F60), una fase de gobierno (φ2) que comprende laaplicación (F100) de términos correctivos a los mandos cinemáticos procedentes de la herramienta de simulaciónantes de su facilitación al simulador de movimientos y al blanco, estando ligados estos términos correctivos a lasposiciones de consigna.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10162443.
Solicitante: MBDA FRANCE.
Nacionalidad solicitante: Francia.
Dirección: 37, BOULEVARD DE MONTMORENCY 75016 PARIS FRANCIA.
Inventor/es: Bourzier,Laurent.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F41G7/00 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F41 ARMAS. › F41G APARATOS DE MIRA; PUNTERIA (aspectos ópticos G02B). › Sistemas de control de la dirección para misiles autopropulsados (control de vuelos B64C, G05D 1/00; proyectiles autopropulsados o misiles con sistemas de control únicamente instalados a bordo F42B 15/01; torpedos-cohetes F42B 17/00; torpedos marinos o minas marinas con medios de propulsión autónomos F42B 19/00; localización del blanco mediante ondas de radio u de otro tipo G01S; bajo el aspecto calculador G06).
- F41H11/00 F41 […] › F41H BLINDAJE; TORRETAS ACORAZADAS; VEHICULOS BLINDADOS O ARMADOS; MEDIOS DE ATAQUE O DE DEFENSA, p. ej. ENMASCARAMIENTO, EN GENERAL. › Instalaciones de defensa; Mecanismos de defensa (aspectos constructivos, ver sección E, p. ej. E04H 9/04 ); Medios para limpiar o detectar minas terrestres.
- F42B15/01 F […] › F42 MUNICIONES; VOLADURA. › F42B CARGAS EXPLOSIVAS, p. ej. PARA VOLADURA; FUEGOS ARTIFICIALES; MUNICIONES (composiciones explosivas C06B; espoletas para municiones F42C; voladura F42D). › F42B 15/00 Proyectiles autopropulsados, p. ej. cohetes; Misiles (F42B 10/00, F42B 12/00, F42B 14/00 tienen prioridad; para entrenamiento o instrucción F42B 8/12; torpedos-cohete F42B 17/00; torpedos marinos F42B 19/00; vehículos espaciales B64G; conjuntos funcionales de propulsión por reacción F02K). › Disposiciones para el guiado o el pilotaje instaladas en los proyectiles autopropulsados o en los misiles (control de vuelo para aviones B64C; sistemas de guiado distintos de los instalados únicamente a bordo F41G 7/00, F41G 9/00; localización de objetivos por medio de proyectiles, p. ej. cohetes, G01S; control de vuelo en general G05D 1/00; aspectos de cálculo G06).
- G01C21/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968).
- G05D1/12 G […] › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control para la búsqueda de un objetivo.
PDF original: ES-2396622_T3.pdf
Fragmento de la descripción:
Procedimiento y sistema de estimación de una trayectoria de un móvil.
Antecedentes de la invención.
La presente invención se sitúa en el ámbito de la validación de las capacidades de funcionamiento de un móvil o vehículo volante, tal como por ejemplo un vehículo aéreo no tripulado, un misil, etc.
Ésta concierne de modo más particular a la estimación de la trayectoria de un móvil en un entorno real de navegación, especialmente tras la detección de un rebasamiento o de un cambio de un objetivo designado para este móvil. Por objetivo se entiende aquí, un blanco, un objeto a alcanzar por el móvil, designado por ejemplo en forma de coordenadas geográficas.
En el sentido de la invención, un rebasamiento de un objetivo por un móvil significa que el móvil no ha alcanzado este objetivo (por ejemplo éste ha fallado el objetivo) . De modo similar, en lo que sigue de la descripción, se hablará de ataque de un objetivo por un móvil cuando éste intenta alcanzar a este objetivo.
La invención permite así, de modo privilegiado, pero no limitativo, evaluar la capacidad de un móvil de volver a atacar a un objeto fallado y/o su capacidad de cambiar de objetivos en el transcurso de una misión.
En el estado actual de la técnica, existen procedimientos de simulación híbrida que permiten estimar la trayectoria de un móvil, tal como un avión o un cohete, de modo preciso y a un coste razonable.
Estos procedimientos de simulación híbrida se apoyan:
-por una parte, en subconjuntos reales, como por ejemplo un simulador de movimientos angulares en el cual está embarcado el móvil o una parte de éste, y que comprende ciertos elementos del móvil tales como su central inercial, su calculador, etc; y
-por otra, en modelos matemáticos que reemplazan a elementos del móvil no puestos en práctica y que modelan el entorno de navegación del móvil, como por ejemplo un modelo matemático para la propulsión, la aerodinámica, para la atmósfera, la Tierra, etc.
Tal procedimiento de simulación está descrito por ejemplo en el documento EP 1 909 067 y en el documento FR 2927 418. Éste es utilizado para validar una central inercial embarcada en un móvil, comparando una trayectoria estimada del móvil con la ayuda del procedimiento de simulación híbrida con una trayectoria de referencia.
Sin embargo, actualmente no se conoce procedimiento ni sistema de simulación híbrida, que permitan estimar la trayectoria de un móvil tras la detección de un acontecimiento representativo de un rebasamiento de un objetivo que este móvil debe alcanzar o de un cambio de objetivo que necesite para alcanzarlo desplazamientos angulares superiores a los ofrecidos por los medios puestos en práctica en el sistema de simulación híbrida, con miras especialmente a permitir la evaluación de la capacidad de reataque del móvil o de su capacidad de cambio de objetivos en el transcurso de una misión.
Objeto y resumen de la invención La presente invención responde especialmente a esta necesidad, proponiendo un procedimiento de estimación de una trayectoria de un móvil en un entorno real de navegación que comprende, la facilitación, por una herramienta de simulación numérica que modela el móvil en este entorno, de mandos cinemáticos a un simulador de movimientos que embarca al móvil y a un blanco representativo de un objetivo a alcanzar por el móvil, siendo alimentada esta herramienta de simulación por mandos de gobierno facilitados por un calculador del móvil y facilitando, en respuesta a estos mandos de gobierno, puntos de la trayectoria. De acuerdo con la invención, el procedimiento de estimación comprende, además:
-en la detección de un acontecimiento representativo de un rebasamiento o de un cambio de un primer objetivo designado para este móvil, una fase de posicionamiento asociada a un segundo objetivo designado para el móvil, que comprende:
--la comparación de posiciones ejecutadas por el simulador de movimientos, en respuesta a primeros mandos cinemáticos de transición, con una primera posición de consigna predeterminada, y la activación de un primer marcador cuando se detecte una posición sensiblemente igual a la primera posición de consigna;
-la comparación de posiciones ejecutadas por el blanco, en respuesta a segundos mandos cinemáticos de transición, con una segunda posición de consigna predeterminada, y la activación de un segundo marcador cuando se detecte una posición sensiblemente igual a la segunda posición de consigna;
-cuando los primero y segundo marcadores estén activados, una etapa de evaluación de una diferencia entre el mando cinemático corriente facilitado al simulador de movimientos y el mando cinemático corriente facilitado al objetivo por la herramienta de simulación; y
-si esta diferencia es inferior a un umbral determinado, una fase de gobierno que comprende la aplicación de términos correctivos a los mandos cinemáticos procedentes de la herramienta de simulación antes de su facilitación al simulador de movimientos y al blanco, estando ligados estos términos correctivos a las posiciones de consigna.
Correlativamente, la invención concierne igualmente a un sistema de simulación híbrida que permite la estimación de una trayectoria de un móvil en un entorno real de navegación, comprendiendo el citado sistema:
-un simulador de movimientos que embarca al móvil;
-un blanco representativo de un objetivo que hay que alcanzar por el móvil; y
-una herramienta de simulación numérica que modela el móvil en el entorno real de navegación, y adaptada para facilitar mandos cinemáticos al simulador de movimientos y al blanco, siendo alimentada esta herramienta de simulación por mandos de gobierno facilitados por un calculador del móvil y facilitando, en respuesta a estos mandos de gobierno, puntos de la trayectoria;
comprendiendo el citado sistema, además:
-medios para detectar un acontecimiento representativo de un rebasamiento o de un cambio de un primer objetivo designado para este móvil;
-medios, activados en la detección de dicho acontecimiento y durante una fase de posicionamiento asociada a un segundo objetivo designado para el móvil:
-para comparar posiciones ejecutadas por el simulador de movimientos en respuesta a primeros mandos cinemáticos de transición con una primera posición de consigna predeterminada, y activar un primer marcador cuando se detecte una posición sensiblemente igual a la primera posición de consigna; y
- para comparar posiciones ejecutadas por el blanco en respuesta a segundos mandos cinemáticos de transición con una segunda posición de consigna predeterminada, y activar un segundo marcador cuando se detecte una posición sensiblemente igual a la segunda posición de consigna;
-medios para detectar cuando los primero y segundo marcadores están activados y para, llegado el caso, evaluar una diferencia entre el mando cinemático corriente facilitado al simulador de movimientos y el mando cinemático corriente facilitado al blanco por la herramienta de simulación;
-medios para comparar esta diferencia con un umbral determinado; y
-medios, activados cuando al diferencia es inferior al citado umbral, para aplicar, en el transcurso de una fase de gobierno, términos correctivos a los mandos cinemáticos procedentes de la herramienta de simulación antes de facilitarlos al simulador de movimientos y al blanco, estando ligados estos términos correctivos a las posiciones de consigna.
La invención se apoya por tanto ventajosamente en un simulador híbrido en bucle cerrado. Éste está compuesto especialmente por una herramienta de simulación numérica así como por equipos reales tales como un simulador de movimientos que embarca al móvil, un blanco que representa el objetivo que hay que alcanzar por el móvil, y un calculador del móvil adaptado para facilitar mandos de gobierno a la herramienta de simulación numérica, permitiendo así el cálculo de los puntos de la trayectoria. De esta manera, la trayectoria del móvil estimada con la ayuda de la invención es muy próxima a una trayectoria real que tendría este móvil.
Cuando el segundo objetivo corresponde al primer objetivo, esta trayectoria refleja el comportamiento del móvil en caso de rebasamiento de su objetivo y de reataque a éste. Inversamente, cuando el primero y el segundo objetivos son distintos, la trayectoria estimada con la ayuda de la invención refleja el comportamiento del móvil en caso de cambio de objetivos efectuado en el transcurso de una misión.
El posicionamiento del blanco y del móvil con respecto a posiciones de consigna predeterminadas se realiza, en el transcurso... [Seguir leyendo]
Reivindicaciones:
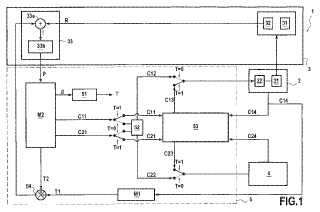
1. Procedimiento de estimación de una trayectoria de un móvil (3) en un entorno real de navegación que comprende, la facilitación (E20) , por una herramienta de simulación numérica (M2) que modela el móvil en este entorno, mandos cinemáticos (C11, C12) a un simulador de movimientos (2) que embarca el móvil y a un blanco (4) representativo de un objetivo que hay que alcanzar por el móvil, siendo alimentada (E10) la citada herramienta de simulación por mandos de gobierno (P) facilitados por un calculador (33) del citado móvil y facilitando, en respuesta a estos mandos de gobierno, puntos (X) de la trayectoria, comprendiendo el citado procedimiento de estimación, además:
-en la detección (F10) de un acontecimiento representativo de un rebasamiento o de un cambio de un primer objetivo designado para este móvil, una fase de posicionamiento (<1) asociada a un segundo objetivo designado para este móvil, que comprende:
-la comparación (F46) de posiciones ejecutadas por el simulador de movimientos, en respuesta a primeros mandos cinemáticos de transición, con una primera posición de consigna predeterminada, y la activación de un primer marcador (f1) cuando se detecte una posición sensiblemente igual a la primera posición de consigna;
-la comparación (F56) de posiciones ejecutadas por el blanco, en respuesta a segundos mandos cinemáticos de transición, con una segunda posición de consigna predeterminada, y la activación de un segundo marcador (f2) cuando se detecte una posición sensiblemente igual a la segunda posición de consigna;
-cuando los primero y segundo marcadores son activados, una etapa de evaluación de una diferencia entre el mando cinemático corriente facilitado al simulador de movimientos y el mando cinemática corriente facilitado al blanco por la herramienta de simulación numérica; y
-si esta diferencia es inferior a un umbral determinado (F60) , una fase de gobierno (<2) que comprende la aplicación (F100) de términos correctivos a los mandos cinemáticos procedentes de la herramienta de simulación antes de su facilitación al simulador de movimientos y al blanco, estando ligados estos términos correctivos a las posiciones de consigna.
2. Procedimiento de estimación de acuerdo con la reivindicación 1, en el cual:
-los citados mandos cinemáticos facilitados por la herramienta de simulación al simulador de movimientos comprenden una componente de desviación lateral y los citados mandos cinemáticos facilitados por la herramienta de simulación al blanco comprenden una componente de orientación, y
-en tanto que no haya sido detectado (F10) un acontecimiento representativo de un rebasamiento o de un cambio de un primer objetivo designado para este móvil, se aplican (E60) a las componentes de desviación lateral y a las componentes de orientación de los mandos cinemáticos, un término de compensación angular antes de su facilitación respectivamente al simulador de movimientos y al blanco.
3. Procedimiento de estimación de acuerdo con las reivindicaciones 1 o 2, en el cual, cuando se requiere un cambio de dirección del móvil con miras a alcanzar al segundo objetivo con respecto a una dirección emprendida por el móvil para alcanzar al primer objetivo, la fase de posicionamiento comprende además una etapa (F30) de determinación del sentido de rotación adoptado por el citado móvil para cambiar de dirección, siendo elegidas las primera y segunda posiciones de consigna en función de este sentido de rotación.
4. Procedimiento de estimación de acuerdo con la reivindicación 3, en el cual durante la etapa de determinación, los mandos cinemáticos de transición facilitados al simulador de movimientos y al blanco son constantes.
5. Procedimiento de estimación de acuerdo con la reivindicación 4, en el cual: los mandos cinemáticos de transición constantes comprenden las posiciones ejecutadas por el simulador de movimientos y por el blanco en el momento de la detección del acontecimiento.
6. Procedimiento de estimación de acuerdo con una cualquiera de las reivindicaciones 3 a 5, en el cual el umbral depende de las posiciones ejecutadas respectivamente por el simulador de movimientos y por el blanco durante la activación respectivamente del primer y del segundo marcador, y del sentido de rotación adoptado por el móvil para cambiar de dirección.
7. Procedimiento de estimación de acuerdo con una cualquiera de las reivindicaciones 1 a 6, en el cual la fase de gobierno comprende además una etapa de evaluación (F90) de los términos correctivos, a partir:
-de las posiciones ejecutadas por el simulador de movimientos y por el blanco respectivamente en el momento de la activación del primero y del segundo marcadores; y
-de los mandos cinemáticos facilitados por la herramienta de simulación en el momento en que se detecte que la diferencia sea inferior al umbral determinado.
8. Procedimiento de estimación de acuerdo con una cualquiera de las reivindicaciones 1 a 7, en el cual, los mandos de gobierno son evaluados (E100) por el calculador del móvil a partir:
-de datos inerciales de medición (R) facilitados por una central inercial (31) del móvil embarcado en el simulador de movimientos;
-de datos inerciales de simulación (T2) representativos de datos inerciales supuestos como facilitados por la central inercial en el entorno real de navegación; y
-de datos inerciales teóricos (T1) representativos de los datos inerciales de medición facilitados por la central inercial, siendo evaluados estos datos inerciales teóricos a partir de mandos cinemáticos ejecutados por el simulador de movimientos.
9. Procedimiento de estimación de acuerdo con la reivindicación 8, en el cual los mandos de gobierno son calculados en función de datos inerciales I definidos por I=T2+R-T1 donde T2, R y T1 designan respectivamente los datos inerciales de simulación, los datos inerciales de medición y los datos inerciales teóricos.
10. Procedimiento de estimación de acuerdo con una cualquiera de las reivindicaciones 1 a 9, en el cual el segundo objetivo corresponde al primer objetivo.
11. Procedimiento de estimación de acuerdo con una cualquiera de las reivindicaciones 1 a 10 que comprende además una etapa de verificación (F120) que el segundo objetivo es alcanzado por el móvil.
12. Sistema de simulación híbrida (1) que permite la estimación de una trayectoria de un móvil (3) en un entorno real de navegación, comprendiendo el citado sistema:
-un simulador de movimientos (2) que embarca al móvil;
-un blanco (4) representativo de un objetivo que hay que alcanzar por el móvil; y
-una herramienta de simulación numérica (M2) que modela el móvil en el entorno real de navegación, y adaptada para facilitar mandos cinemáticos al simulador de movimientos y al blanco, siendo alimentada la citada herramienta de simulación por mandos de gobierno (P) facilitados por un calculador del móvil (33) y que, en respuesta a estos mandos de gobierno, facilita puntos (X) de la trayectoria;
comprendiendo el citado sistema, además:
-medios (51) para detectar un acontecimiento representativo de un rebasamiento o de un cambio de un primer objetivo designado para este móvil;
-medios (53) , activados en la detección de dicho acontecimiento y durante una fase de posicionamiento asociada a un segundo objetivo designado para el móvil:
-para comparar posiciones ejecutadas por el simulador de movimientos en respuesta a primeros mandos cinemáticos de transición con una primera posición de consigna predeterminada, y activar un primer marcador cuando se detecte una posición sensiblemente igual a la primera posición de consigna; y
-para comparar posiciones ejecutadas por el blanco en respuesta a segundos mandos cinemáticos de transición con una segunda posición de consigna predeterminada, y activar un segundo marcador cuando se detecte una posición sensiblemente igual a la segunda posición de consigna;
-medios (53) para detectar cuando los primero y segundo marcadores están activados y para, llegado el caso, evaluar una diferencia entre el mando cinemático corriente facilitado al simulador de movimientos y el mando cinemático corriente facilitado al blanco por la herramienta de simulación;
-medios (53) para comparar esta diferencia con un umbral determinado; y
-medios (53) , activados cuando al diferencia es inferior al citado umbral, para aplicar, en el transcurso de una fase de gobierno, términos correctivos a los mandos cinemáticos procedentes de la herramienta de simulación antes de su facilitación al simulador de movimientos y al blanco, estando ligados estos términos correctivos a las posiciones de consigna.
Patentes similares o relacionadas:
Procedimiento para localizar y combatir amenazas, en especial en situaciones de amenaza asimétricas, del 4 de Diciembre de 2019, de ThyssenKrupp Marine Systems GmbH: Procedimiento para localizar amenazas mediante el uso de un sistema, en donde el sistema es un sistema para localizar amenazas a un buque, en […]
Método de defensa y rechazo, del 13 de Noviembre de 2019, de The Security Oracle, Inc: Método para proteger activamente un activo físico/área mediante defensa y rechazo, que comprende: recibir, por una red informática, datos de sensor asociados a características […]
Procedimiento para evaluar el nivel de amenaza, del 5 de Diciembre de 2018, de THALES: Un procedimiento para evaluar el nivel de amenaza de al menos una entidad (SE) entre una pluralidad de entidades en un entorno de campo de batalla, siendo evaluado el nivel […]
DISPOSITIVO AUXILIAR DE VISIÓN PARA VEHÍCULOS MILITARES PROVISTOS DE CAÑÓN, del 15 de Marzo de 2017, de ORÚS RUÍZ, Santiago: 1. Dispositivo auxiliar de visión para vehículos militares provistos de cañón caracterizado porque comprende: - un soporte dotado de medios de fijación […]
DISPOSITIVO DE PROTECCION DE UNA ZONA DE TERRENO CONTRA LAS AMENAZAS ENEMIGAS., del 1 de Febrero de 2007, de TDA ARMEMENTS S.A.S.: Dispositivo de protección de una zona de terreno contra las amenazas enemigas, que incluye tres subconjuntos principales unidos entre ellos por una […]
 DISPOSITIVO DE VISUALIZACION PARA REVISION DE SEGURIDAD EN LOS BAJOS DE LOS VEHICULOS, del 16 de Septiembre de 2008, de EXPOSITO SERRANO,JOSE ANTONIO: 1. Dispositivo de visualización para revisión de seguridad en los bajos de los vehículos, caracterizado por un mecanismo de tracción radio controlado por cadenas, en cuyo chasis […]
DISPOSITIVO DE VISUALIZACION PARA REVISION DE SEGURIDAD EN LOS BAJOS DE LOS VEHICULOS, del 16 de Septiembre de 2008, de EXPOSITO SERRANO,JOSE ANTONIO: 1. Dispositivo de visualización para revisión de seguridad en los bajos de los vehículos, caracterizado por un mecanismo de tracción radio controlado por cadenas, en cuyo chasis […]
Captación de corredor, del 29 de Abril de 2020, de nearmap australia pty, ltd: Un método para crear un ortomosaico de un área de corredor que consiste en una faja de tierra o de agua a lo largo de una trayectoria arbitraria , área […]
 Procedimiento para mejorar la precisión de un sistema de navegación en base a radio, del 25 de Marzo de 2020, de SAAB AB: Un procedimiento para mejorar la precisión de un sistema de navegación en base a radio para corregir una posición dada por dicho sistema […]
Procedimiento para mejorar la precisión de un sistema de navegación en base a radio, del 25 de Marzo de 2020, de SAAB AB: Un procedimiento para mejorar la precisión de un sistema de navegación en base a radio para corregir una posición dada por dicho sistema […]