PROCEDIMIENTO Y SISTEMA DE CONTROL DEL GIRO DE RUEDA TRASERA DIRECTRIZ Y VEHICULO ASI EQUIPADO.
Procedimiento de control del giro de rueda trasera directriz para un vehículo al menos con tres ruedas directrices,
en el cual se estima una perturbación experimentada por el vehículo por medio de un observador de estado, se elabora una consigna actual de giro de rueda trasera a partir de la estimación de la perturbación y de datos de desplazamiento del vehículo, rechazando la perturbación en función de la velocidad longitudinal del vehículo, caracterizado porque el observador de estado comprende una entrada de ángulo de giro de la rueda delantera, una entrada de datos de desplazamiento del vehículo, una entrada de consigna anterior de giro de rueda trasera que haya experimentado un retraso unitario
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2004/050710.
Solicitante: RENAULT S.A.S..
Nacionalidad solicitante: Francia.
Dirección: 13-15 QUAI ALPHONSE LE GALLO 92100 BOULOGNE BILLANCOURT FRANCIA.
Inventor/es: GUEGAN,STEPHANE, POTHIN,RICHARD.
Fecha de Publicación: .
Fecha Solicitud PCT: 16 de Diciembre de 2004.
Fecha Concesión Europea: 7 de Julio de 2010.
Clasificación Internacional de Patentes:
- B62D7/15G
Clasificación PCT:
- B62D101/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › Velocidad del vehículo.
- B62D113/00 B62D […] › Posición de elementos del mecanismo de dirección, p. ej. de las ruedas directrices o del volante.
- B62D6/00 B62D […] › Dispositivos para el control automático de la dirección en función de las condiciones de conducción, que son detectadas y para las cuales es aplicada una reacción (medios para producir un cambio en la dirección del vehículo B62D 1/00; válvulas de control de la dirección B62D 5/06; combinados con medios para inclinar el vehículo o las ruedas en los giros B62D 9/00).
Clasificación antigua:
- B62D101/00 B62D […] › Velocidad del vehículo.
- B62D113/00 B62D […] › Posición de elementos del mecanismo de dirección, p. ej. de las ruedas directrices o del volante.
- B62D151/00
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania.
Fragmento de la descripción:
La presente invención está incluida en el ámbito de los sistemas de control de vehículos terrestres, en particular de vehículos automóviles con ruedas.
De manera clásica, los vehículos automóviles están dotados de un chasis, de un habitáculo, de ruedas conectadas al chasis por un mecanismo de suspensión con 5 ruedas delanteras directrices gobernadas por un volante a disposición del conductor en el habitáculo del vehículo.
El documento FR-A-2 681 303 describe un dispositivo de control de dirección trasera para vehículo automóvil con cuatro ruedas directrices, que incluye una placa que forma leva y dos rodillos dispuestos en un mismo plano mediano vertical que 10 contiene el eje longitudinal de una barra de dirección trasera que gobierna el pivotamiento de las ruedas traseras.
Este documento describe igualmente que para obtener el mejor comportamiento posible del vehículo en carretera, es necesario dirigir les ruedas traseras en el mismo sentido que las ruedas delanteras para un valor de ángulo de 15 giro del volante inferior a un valor umbral predeterminado en el sentido opuesto a las ruedas delanteras cuando el valor de ángulo de oblicuidad supera el valor umbral. Se obtendría así un efecto “sobrevirador” deseable del vehículo cuando el ángulo de giro es relativamente grande, por ejemplo cuando se aparca el vehículo en un garaje o un parque de estacionamiento, y un efecto “subvirador” igualmente deseable cuando el 20 ángulo de giro es relativamente pequeño como es el caso cuando el vehículo circula rápidamente.
No obstante, tal dispositivo, relativamente gastado, no permite de actuar finamente sobre el comportamiento del vehículo.
Se conoce igualmente por el documento WO 02/19137171 un procedimiento de 25 control de giro que describe las características del preámbulo de las reivindicaciones 1 y 9, pero el procedimiento sigue siendo complejo.
La invención propone remediar estos inconvenientes y propone un procedimiento y un sistema de control evolucionados, que permiten mejorar el comportamiento del vehículo y por consiguiente la seguridad del conductor y la 30 comodidad de conducción.
El procedimiento de control del giro de rueda trasera directriz, según un aspecto de la invención, se destina a un vehículo al menos con tres ruedas directrices. En función del ángulo de giro de la rueda delantera, de datos de desplazamiento del vehículo, y de una consigna anterior de giro de rueda trasera, se estima una 35 perturbación experimentada por el vehículo y se elabora una consigna actual de giro
de rueda trasera. Así es posible minimizar los efectos de las perturbaciones sobre el vehículo y sobre su percepción por el conductor.
En la invención, dichos datos de desplazamiento del vehículo incluyen la velocidad longitudinal del vehículo. La consigna puede tener en cuenta por tanto la velocidad y adaptarse a la conducción en zona urbana, en zona rural, y en vías 5 rápidas.
En un modo de realización de la invención, dichos datos de desplazamiento del vehículo comprenden la velocidad de guiñada lateral del vehículo.
En un modo de realización de la invención. a partir de la estimación de la perturbación y de datos de desplazamiento del vehículo, se elabora una consigna 10 actual de giro de rueda trasera. Dichos datos de desplazamiento del vehículo comprenden la velocidad longitudinal del vehículo. El rechazo de la perturbación puede efectuarse en función de la velocidad longitudinal del vehículo. La consigna actual de giro de rueda trasera puede elaborarse de manera que la perturbación sea rechazada asintóticamente. Alternativamente, la consigna actual de giro de rueda 15 trasera puede elaborarse de modo que la perturbación sea rechazada asintóticamente al producirse acontecimientos identificados. Un acontecimiento identificado puede ser el desencadenamiento de un sistema antibloqueo de ruedas, de un sistema antipatinaje, de una detección de frenado en caso de adherencia disimétrica, etc.
Se puede transmitir la consigna actual de giro de rueda trasera al menos a un 20 módulo de control de otro sistema, por ejemplo un sistema antibloqueo de ruedas, o un sistema antipatinaje.
En un modo de realización de la invención, se elabora una consigna actual de giro de rueda trasera mientras el vehículo esté en movimiento. En de otros términos, el giro dinámico de rueda trasera directriz se activa permanentemente a partir de la 25 puesta en movimiento del vehículo.
La invención propone igualmente un sistema de control de giro de rueda trasera directriz para un vehículo al menos con tres ruedas directrices. El sistema comprende un medio para elaborar una consigna actual de giro de rueda trasera en función del ángulo de giro de la rueda delantera, de datos de desplazamiento del 30 vehículo, y de una consigna previa de giro de rueda trasera, dicho medio para elaborar una consigna que comprende un módulo de rechazo de perturbación.
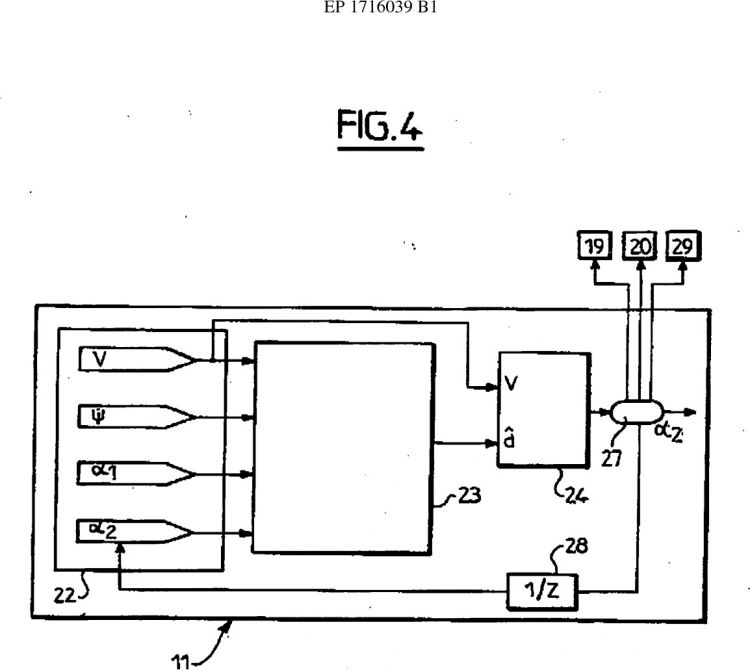
En un modo de realización de la invención, dicho medio para elaborar una consigna comprende un observador de estado apto para proporcionar al módulo de rechazo de perturbación una estimación de al menos una variable. Dicha variable 35
puede ser la perturbación experimentada por el vehículo y/o cualquier otra variable cuya medida sea imposible, difícil u onerosa.
En un modo de realización de la invención, dicho observador de estado comprende una entrada de ángulo de giro de rueda delantera, una entrada de datos de desplazamiento del vehículo, y una entrada de consigna anterior de giro de rueda 5 trasera. El sistema presenta una estructura de lazo cerrado, particularmente robusto en funcionamiento.
En un modo de realización de la invención, dicho observador de estado comprende una entrada de velocidad longitudinal del vehículo, una entrada de velocidad de guiñada lateral del vehículo y una salida de estimación de perturbación 10 experimentada por el vehículo.
En un modo de realización de la invención, dicho módulo de rechazo de perturbación comprende una entrada de velocidad longitudinal del vehículo y una entrada de estimación de la perturbación experimentada por el vehículo.
La invención propone igualmente un vehículo provisto de un chasis, de al 15 menos tres ruedas directrices conectadas elásticamente al chasis, y de un sistema de control del giro de rueda trasera directriz, que comprende un medio para elaborar una consigna actual de giro de rueda trasera en función del ángulo de giro de la rueda delantera, de dados de desplazamiento del vehículo, y de una consigna anterior de giro de trasera, comprendiendo dicho medio para elaborar una consigna un módulo de 20 rechazo de perturbación.
La invención se aplica a vehículos de cuatro ruedas, dos delanteras y dos traseras, de tres ruedas, o incluso a vehículos de seis ruedas o más, de las cuales al menos cuatro directrices.
La invención permite a un vehículo adoptar el comportamiento más estable 25 posible cualquiera que sea la solicitación del conductor o el estado de la calzada. Se puede tener en cuenta algunas situaciones susceptibles de generar una pérdida de control del vehículo, como por ejemplo, una evitación de obstáculo simple o doble. La invención permite reducir los riegos de pérdida de control en este tipo de casos, que pueden ser debidas a una respuesta del vehículo inadecuada por ser demasiado viva, 30 no suficientemente amortiguada o incluso poco previsible.
Por otra parte, la invención permite un aumento de la sensación de seguridad, de la comodidad y del placer de conducción.
El sistema de control de las ruedas traseras directrices en un vehículo de cuatro ruedas directrices permite minimizar, teniendo en cuenta la velocidad del 35 vehículo, la respuesta lateral del vehículo a un volantazo del conductor. La
optimización se hace según criterios de seguridad, comodidad y satisfacción de conducción.
La presente invención se comprenderá mejor con el estudio de la descripción detallada de algunos modos de realización, tomados a título de ejemplos en modo alguno restrictivos e ilustrados por los dibujos anexados, en los cuales: 5
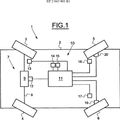
- la figura 1 es una vista esquemática de un vehículo equipado con el sistema de control según un aspecto de la invención;
- la figura 2 es un esquema lógico del sistema según un aspecto...
Reivindicaciones:
1. Procedimiento de control del giro de rueda trasera directriz para un vehículo al menos con tres ruedas directrices, en el cual se estima una perturbación experimentada por el vehículo por medio de un observador de estado, se elabora una 5 consigna actual de giro de rueda trasera a partir de la estimación de la perturbación y de datos de desplazamiento del vehículo, rechazando la perturbación en función de la velocidad longitudinal del vehículo, caracterizado porque el observador de estado comprende una entrada de ángulo de giro de la rueda delantera, una entrada de datos de desplazamiento del vehículo, una entrada de consigna anterior de giro de rueda 10 trasera que haya experimentado un retraso unitario.
2. Procedimiento según la reivindicación 1, en el cual dichos datos de desplazamiento del vehículo comprenden la velocidad longitudinal del vehículo.
3. Procedimiento según la reivindicación 1 ó 2, en el cual dichos datos de desplazamiento del vehículo comprenden la velocidad de guiñada lateral del 15 vehículo.
4. Procedimiento según una cualquiera de las reivindicaciones 1 a 3, en el cual la consigna actual de giro de rueda trasera es elaborada de modo que la perturbación d sea rechazada asintóticamente.
5. Procedimiento según la reivindicación 4, en el cual la consigna actual de 20 giro de rueda trasera es elaborada de modo que la perturbación d sea rechazada asintóticamente en caso de activación de un sistema antibloqueo de las ruedas.
6. Procedimiento según la reivindicación 4, en el cual la consigna actual de giro de rueda trasera es elaborada de modo que la perturbación d sea rechazada asintóticamente al producirse la activación de un sistema antipatinaje. 25
7. Procedimiento según una cualquiera de las reivindicaciones anteriores, en el cual la consigna actual de giro de rueda trasera se transmite al menos a un módulo de mando de otro sistema.
8. Procedimiento según una cualquiera de las reivindicaciones anteriores, en el cual se elabora una consigna actual de giro de rueda trasera mientras el vehículo 30 está en movimiento.
9. Sistema de control (10) del giro de rueda trasera directriz (5) para un vehículo (1) con al menos tres ruedas directrices, que comprende un medio para elaborar una consigna actual de giro de al menos una rueda trasera (5) en función del ángulo de giro de al menos una rueda delantera (3), de datos de desplazamiento del 35 vehículo, comprendiendo dicho medio para elaborar una consigna un módulo de
rechazo de perturbación (24) y un observador de estado (23) apto para proporcionar al módulo de rechazo de perturbación (24) una estimación de una perturbación experimentada por el vehículo en función del ángulo de giro de la rueda delantera α1 y de los datos de desplazamiento del vehículo, caracterizado porque dicho observador de estado (23) comprende una entrada de ángulo de giro de la rueda delantera, una 5 entrada de datos de desplazamiento del vehículo y una entrada de consigna anterior de giro de rueda trasera proveniente de un retraso unitario (28) y comprendiendo dicho módulo de rechazo de perturbación (24) una entrada de velocidad longitudinal V del vehículo, una entrada de estimación de perturbación experimentada por el vehículo, función de la consigna anterior de giro de la rueda trasera y una salida (27) que 10 proporciona la consigna actual de giro de las ruedas traseras del vehículo, elaborada a partir de la estimación de la perturbación y de datos de desplazamiento del vehículo.
10. Sistema según la reivindicación 9, caracterizado porque dicho observador de estado (23) comprende una entrada de velocidad longitudinal V del 15 vehículo, una entrada de velocidad de guiñada lateral de vehículo y una salida de estimación de perturbación experimentada por el vehículo.
11. Sistema según una de las reivindicaciones 9 ó 10, que comprende adicionalmente un módulo (25) de detección de situación apto para enviar al módulo de rechazo de perturbación (24) instrucciones de inhibición cuando la situación 20 detectada es tal que sea deseable que la consigna actual de giro de rueda trasera sea nula.
12. Sistema según el una de las reivindicaciones 9 a 11 en el cuál el ángulo, de giro de rueda delantera utilizado para la estimación de la perturbación resulta de una orden recibida de manera mecánica o eléctrica con procedencia del volante de 25 dirección del vehículo a disposición del conductor.
13. Vehículo (1) provisto de un chasis (2) y de al menos tres ruedas directrices conectadas elásticamente al chasis (2), caracterizado porque comprende un sistema de control según las reivindicaciones 9 a 12.
Patentes similares o relacionadas:
PROCEDIMIENTO DE ACCIONAMIENTO DE UN VEHÍCULO DE CUATRO RUEDAS DIRECTRICES CON LA AYUDA DE UN DISPOSITIVO DE FRENADO INDIVIDUAL DE LAS RUEDAS, del 4 de Febrero de 2011, de RENAULT S.A.S.: Procedimiento de accionamiento de un vehículo, que comprende las etapas - cuando se detecta que la desviación sobrepasa un umbral predeterminado, […]
 DISPOSITIVO Y PROCEDIMIENTO DE VIGILANCIA DEL CONTROL DEL GIRO DE RUEDA TRASERA DIRECTRIZ, del 10 de Diciembre de 2010, de RENAULT SAS: Procedimiento de vigilancia del control del giro de rueda trasera directriz para un vehículo con al menos tres ruedas directrices, en el cual se compara una consigna de giro […]
DISPOSITIVO Y PROCEDIMIENTO DE VIGILANCIA DEL CONTROL DEL GIRO DE RUEDA TRASERA DIRECTRIZ, del 10 de Diciembre de 2010, de RENAULT SAS: Procedimiento de vigilancia del control del giro de rueda trasera directriz para un vehículo con al menos tres ruedas directrices, en el cual se compara una consigna de giro […]
 PROCEDIMIENTO Y SISTEMA DE COMANDO DEL GIRO DE LA RUEDA TRASERA DIRECTRIZ Y VEHICULO CORRESPONDIENTE, del 3 de Noviembre de 2010, de RENAULT S.A.S.: Procedimiento de comando del giro de la rueda trasera directriz para un vehículo de por lo menos tres ruedas directrices, en el cual se elabora […]
PROCEDIMIENTO Y SISTEMA DE COMANDO DEL GIRO DE LA RUEDA TRASERA DIRECTRIZ Y VEHICULO CORRESPONDIENTE, del 3 de Noviembre de 2010, de RENAULT S.A.S.: Procedimiento de comando del giro de la rueda trasera directriz para un vehículo de por lo menos tres ruedas directrices, en el cual se elabora […]
 PROCEDIMIENTO Y DISPOSITIVO PARA ESTABILIZAR UN VEHICULO, del 2 de Junio de 2010, de ROBERT BOSCH GMBH: Procedimiento para la estabilización de un vehículo de carretera , en particular de un vehículo de pasajeros, con un remolque , el cual es arrastrado […]
PROCEDIMIENTO Y DISPOSITIVO PARA ESTABILIZAR UN VEHICULO, del 2 de Junio de 2010, de ROBERT BOSCH GMBH: Procedimiento para la estabilización de un vehículo de carretera , en particular de un vehículo de pasajeros, con un remolque , el cual es arrastrado […]
 PROCEDIMIENTO Y DISPOSITIVO DE CONTROL DE ANGULO DE ORIENTACION DE RUEDA TRASERA DE UN VEHICULO AUTOMOVIL, del 6 de Abril de 2010, de RENAULT S.A.S.: Procedimiento de control de ángulo de orientación de rueda trasera de un vehículo automóvil que comprenda un eje de ruedas delanteras directrices, cuyo ángulo […]
PROCEDIMIENTO Y DISPOSITIVO DE CONTROL DE ANGULO DE ORIENTACION DE RUEDA TRASERA DE UN VEHICULO AUTOMOVIL, del 6 de Abril de 2010, de RENAULT S.A.S.: Procedimiento de control de ángulo de orientación de rueda trasera de un vehículo automóvil que comprenda un eje de ruedas delanteras directrices, cuyo ángulo […]
 Sistema de alimentación de energía para vehículos y vehículo de tracción eléctrica, del 25 de Diciembre de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un sistema de alimentación de energía para vehículos para la alimentación de energía eléctrica desde una unidad de transmisión de energía de un dispositivo de […]
Sistema de alimentación de energía para vehículos y vehículo de tracción eléctrica, del 25 de Diciembre de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un sistema de alimentación de energía para vehículos para la alimentación de energía eléctrica desde una unidad de transmisión de energía de un dispositivo de […]
Procedimiento para el control de la dirección y el comportamiento de un vehículo, del 13 de Noviembre de 2019, de Sentient IP AB: Un procedimiento para controlar un accionador de par de torsión de retroalimentación y al menos un accionador de guiñada y/o del estado lateral del vehículo, tal como […]
 Método para controlar la dirección de vehículos y el comportamiento de vehículos, del 31 de Julio de 2019, de Sentient IP AB: Un método para controlar uno o más actuadores de dirección en un sistema de dirección en un vehículo que incorpora las siguientes etapas de […]
Método para controlar la dirección de vehículos y el comportamiento de vehículos, del 31 de Julio de 2019, de Sentient IP AB: Un método para controlar uno o más actuadores de dirección en un sistema de dirección en un vehículo que incorpora las siguientes etapas de […]