PROCEDIMIENTO Y SISTEMA DE COMANDO DEL GIRO DE LA RUEDA TRASERA DIRECTRIZ Y VEHICULO CORRESPONDIENTE.
Procedimiento de comando (10) del giro de la rueda trasera directriz (5) para un vehículo de por lo menos tres ruedas directrices,
en el cual se elabora una consigna actual de giro de la rueda trasera (α2) en función del ángulo de giro de la rueda delantera (α1), de datos de desplazamiento del vehículo y de una consigna de giro de la rueda trasera, caracterizado por el hecho de que se estima por medio de un observador de estado (23) las perturbaciones (d) sufridas por el vehículo a partir de magnitudes medidas y de que, en función de situaciones identificadas, se activan o se desactivan selectivamente de forma manual o automática, diferentes módulos que comprenden: un módulo de rechazo de perturbación asintótica (24) que efectúa un lazo sobre una perturbación estimada (d) recibida a la entrada y que emite a la salida una señal (α2RP) cuyo valor es la inversa del producto de la perturbación estimada (d) por un operador (Ga), de forma tal de volver la perturbación (d) inobservable con respecto a la salida cuando dicho módulo está activo; un módulo de reacción positiva (25) capaz, cuando está activado, de elaborar, a partir de un modelo de vehículo de dos ruedas, una consigna de ángulo de giro (α2FF) de rueda trasera a partir de un valor de comando corregido (α2FF - transitorio) de la dinámica de la respuesta transitoria y de un valor de comando estático (α2FF - estático). y un módulo de comando (27) que recibe a la entrada la información de activación o de desactivación de los módulos de rechazo de perturbación (24) y de reacción positiva (25), elaborando dicho módulo de comando (27) una consigna de ángulo de giro de la rueda trasera (α2PP) que permite actuar sobre la dinámica de la respuesta transitoria y sobre la respuesta estática del vehículo; se calcula la consigna actual del ángulo de giro de la rueda trasera (α2) a partir de los valores de salida de los diferentes módulos mencionados anteriormente (24, 25, 27)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2004/050709.
Solicitante: RENAULT S.A.S..
Nacionalidad solicitante: Francia.
Dirección: 13-15 QUAI ALPHONSE LE GALLO, 92100 BOULOGNE BILLANCOURT.
Inventor/es: GUEGAN,STEPHANE, POTHIN,RICHARD.
Fecha de Publicación: .
Fecha Concesión Europea: 30 de Junio de 2010.
Clasificación Internacional de Patentes:
- B62D7/15G
Clasificación PCT:
- B62D7/15 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 7/00 Timonería de dirección; Manguetas o su montaje (B62D 13/00 tiene prioridad; dirección asistida o de relé de potencia B62D 5/00). › caracterizada por medios que modifican la relación entre los ángulos de dirección de las ruedas directrices (variando el radio automáticamente en función de las condiciones de conducción B62D 6/00).
Clasificación antigua:
- B62D7/15 B62D 7/00 […] › caracterizada por medios que modifican la relación entre los ángulos de dirección de las ruedas directrices (variando el radio automáticamente en función de las condiciones de conducción B62D 6/00).
Fragmento de la descripción:
Procedimiento y sistema de comando del giro de la rueda trasera directriz y vehículo correspondiente.
Campo de la invención
La presente invención concierne al dominio de los sistemas de comando de vehículos terrestres, en particular, de vehículos automóviles de ruedas.
De forma clásica, los vehículos automóviles están provistos de un chasis, de un habitáculo, de ruedas unidas al chasis mediante un mecanismo de suspensión con las ruedas delanteras directrices comandadas por un volante a disposición del conductor dentro del habitáculo del vehículo.
El documento FR-A-2 681 303 describe un dispositivo de comando de dirección trasera para un vehículo automóvil de cuatro ruedas directrices, que comprende una placa que forma una leva y dos ruedas dispuestas en un mismo plano medio vertical que contiene al eje longitudinal de una barra de dirección trasera que comanda el giro de las ruedas traseras.
Este documento describe igualmente que para obtener el mejor comportamiento posible en ruta del vehículo, es necesario girar las ruedas traseras en el mismo sentido que las ruedas delanteras para un valor del ángulo de giro del volante inferior a un valor umbral predeterminado y en el sentido opuesto a las ruedas delanteras cuando el valor del ángulo de giro sobrepasa el valor del umbral. Se obtendría así un efecto de "sobreviraje" deseable del vehículo cuando el ángulo de giro es relativamente importante, por ejemplo cuando se aparca el vehículo en un garaje o en un aparcamiento, y un efecto de "subviraje" igualmente deseable cuando el ángulo de giro es relativamente pequeño como es el caso cuando el vehículo rueda relativamente rápido.
El documento WO 02/14137 describe un procedimiento de control de guiñada y de la dinámica transversal de un vehículo equipado con cuatro ruedas directrices comandadas eléctricamente por medio de lazos de comando mutuamente abiertos para comandar respectivamente el ángulo de giro delantero y el ángulo de giro trasero. Este documento comprende un módulo de cálculo del ángulo de giro sin tener en cuenta las perturbaciones exteriores, lo que genera la obtención de un cálculo aproximativo del ángulo de giro.
Sin embargo, tales dispositivos, relativamente bastos, no permiten actuar de forma fina sobre el comportamiento del vehículo.
La invención pretende remediar estos inconvenientes y propone un procedimiento y un sistema de comando evolucionados, que permiten mejorar el comportamiento del vehículo y, como consecuencia, la seguridad del conductor y la comodidad de la conducción.
El procedimiento de comando del giro de la rueda trasera directriz, según un aspecto de la invención, está destinado a un vehículo de por lo menos tres ruedas directrices.
Tal como se ha reivindicado, el procedimiento comprende una etapa en la cual se elabora una consigna actual de giro de la rueda trasera en función del ángulo de giro de la rueda delantera, de los datos de desplazamiento del vehículo y de una consigna de giro de la rueda trasera.
Según la invención, se estima por medio de un observador de estado, las perturbaciones sufridas por el vehículo a partir de magnitudes medidas y, en función de situaciones identificadas, se activan o se desactivan selectivamente de forma manual o automática, diferentes módulos.
Estos módulos comprenden un módulo de rechazo de perturbación asintótica, un módulo de reacción positiva y un módulo de comando.
El módulo de rechazo de perturbación asintótica efectúa un lazo sobre una perturbación estimada recibida a la entrada y emite a la salida, una señal cuyo valor es la inversa del producto de la perturbación estimada por un operador, de forma tal de volver la perturbación inobservable con respecto a la salida cuando dicho módulo está activo.
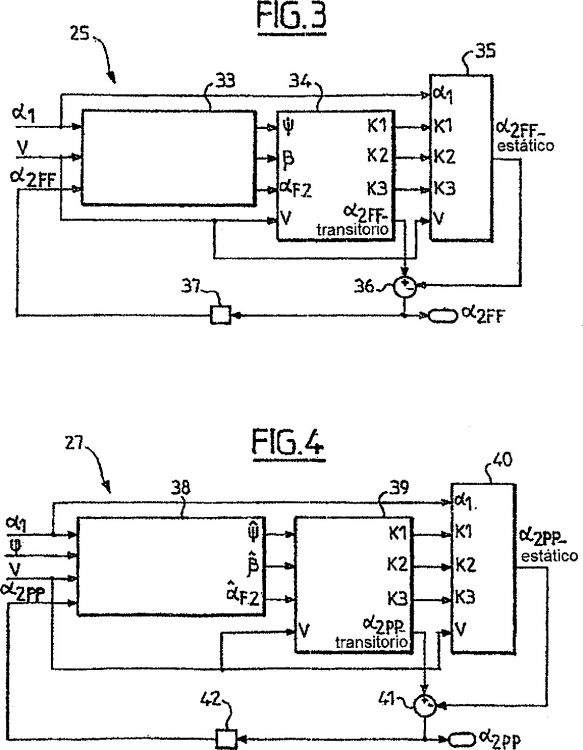
El módulo de reacción positiva es capaz, cuando está activado, de elaborar, a partir de un modelo de vehículo de dos ruedas, una consigna de ángulo de giro de rueda trasera a partir de un valor de comando corregido de la dinámica de la respuesta transitoria y de un valor de comando estático.
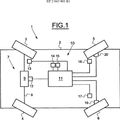
El módulo de comando recibe a la entrada la información de activación o de desactivación de los módulos de rechazo de perturbación y de reacción positiva. Este módulo de comando elabora una consigna de ángulo de giro de la rueda trasera que permite actuar sobre la dinámica de la respuesta transitoria y sobre la respuesta estática del vehículo.
La consigna actual del ángulo de giro de la rueda trasera es calculada a partir de los valores de salida de los diferentes módulos mencionados anteriormente.
El hecho de tener en cuenta la consigna anterior de giro de la rueda trasera permite un funcionamiento robusto y fiable. Los datos de desplazamiento del vehículo pueden comprender la velocidad del vehículo de forma que la consigna actual de giro de la rueda trasera sea establecida en función de la velocidad del vehículo.
En un modo de realización de la invención, se estiman datos de estado del vehículo a partir de los datos de entrada. Los datos de estado estimados pueden comprender la velocidad de guiñada ψ, el ángulo de desviación β, y el ángulo de giro de la rueda trasera α. Los datos estimados pueden ser muy variables, siendo su medición imposible, difícil o costosa.
La invención propone igualmente un sistema de comando del giro de la rueda trasera directriz para un vehículo de al menos tres ruedas directrices.
Tal como se reivindica, el sistema de comando comprende medios para elaborar una consigna actual de giro de la rueda trasera en función del ángulo de giro de la rueda delantera, de datos de desplazamiento del vehículo y de una consigna de giro de la rueda trasera.
Según la invención, el sistema comprende un módulo de rechazo de perturbación asintótica, un módulo de reacción positiva, un módulo de comando y un medio de activación y desactivación selectiva de los módulos citados anteriormente.
El módulo de rechazo de perturbación asintótica es capaz de efectuar un lazo sobre una perturbación estimada obtenida por medio de un observador de estado y recibida a la entrada. Este módulo de rechazo es capaz de emitir a la salida una señal cuyo valor es la inversa del producto de la perturbación estimada por un operador, de forma tal de volver la perturbación inobservable con respecto a la salida cuando dicho módulo está activo.
El módulo de reacción positiva es capaz, cuando está activado, de elaborar, a partir de un modelo de vehículo de dos ruedas, una consigna de ángulo de giro de rueda trasera a partir de un valor de comando corregido de la dinámica de la respuesta transitoria y de un valor de comando estático.
El módulo de comando recibe a la entrada la información de activación o de desactivación de los módulos de rechazo de perturbación y de reacción positiva. Este módulo de comando elabora una consigna de ángulo de giro de la rueda trasera que permite actuar sobre la dinámica de la respuesta transitoria y sobre la respuesta estática del vehículo.
El sistema comprende igualmente un medio de activación y de desactivación selectiva de los módulos citados anteriormente.
El observador de estado es apto para estimar los estados del vehículo y las perturbaciones sufridas por el vehículo.
En un modo de realización de la invención, el módulo de comando es de tipo por asignación de polos. El módulo de comando por asignación de polos puede ser activado y desactivado por el medio de activación y de desactivación selectiva.
Ventajosamente, el módulo de reacción positiva es realimentado.
En un modo de realización de la invención, el módulo de reacción positiva es del tipo por inversión de modelo.
Con preferencia, el módulo de reacción positiva comprende un elemento de cálculo de la velocidad de guiñada y de la desviación al centro de gravedad del vehículo, a partir de un modelo de vehículo, y un elemento de cálculo de un comando que permite caracterizar las respuestas dinámicas y estáticas del vehículo.
En un modo de realización de la invención, el medio de activación y de desactivación selectiva es de comando manual.
En un modo de realización de la invención, el medio de activación y...
Reivindicaciones:
1. Procedimiento de comando (10) del giro de la rueda trasera directriz (5) para un vehículo de por lo menos tres ruedas directrices, en el cual se elabora una consigna actual de giro de la rueda trasera (α2) en función del ángulo de giro de la rueda delantera (α1), de datos de desplazamiento del vehículo y de una consigna de giro de la rueda trasera, caracterizado por el hecho de que se estima por medio de un observador de estado (23) las perturbaciones (d) sufridas por el vehículo a partir de magnitudes medidas y de que, en función de situaciones identificadas, se activan o se desactivan selectivamente de forma manual o automática, diferentes módulos que comprenden:
un módulo de rechazo de perturbación asintótica (24) que efectúa un lazo sobre una perturbación estimada (
un módulo de reacción positiva (25) capaz, cuando está activado, de elaborar, a partir de un modelo de vehículo de dos ruedas, una consigna de ángulo de giro (α2FF) de rueda trasera a partir de un valor de comando corregido (α2FF - transitorio) de la dinámica de la respuesta transitoria y de un valor de comando estático (α2FF - estático).
y un módulo de comando (27) que recibe a la entrada la información de activación o de desactivación de los módulos de rechazo de perturbación (24) y de reacción positiva (25), elaborando dicho módulo de comando (27) una consigna de ángulo de giro de la rueda trasera (α2PP) que permite actuar sobre la dinámica de la respuesta transitoria y sobre la respuesta estática del vehículo;
se calcula la consigna actual del ángulo de giro de la rueda trasera (α2) a partir de los valores de salida de los diferentes módulos mencionados anteriormente (24, 25, 27).
2. Procedimiento según la reivindicación 1, en el cual los datos de desplazamiento del vehículo comprenden la velocidad del vehículo de forma que la consigna actual de giro de la rueda trasera sea establecida en función de la velocidad (V) del vehículo.
3. Procedimiento según una cualquiera de las reivindicaciones precedentes, en el cual el observador de estado (23) permite estimar datos de estado del vehículo a partir de datos de entrada, tales como la masa del vehículo (M), la inercia (I2) del vehículo, las distancias del centro de gravedad a los ejes delantero y trasero (L1, L2) y las rigideces de desviación delantera y trasera (D1, D2).
4. Procedimiento según la reivindicación 3, en el cual los datos de estado estimados comprenden la velocidad de guiñada ψ, el ángulo de desviación β, y el ángulo de giro de la rueda trasera α2.
5. Sistema de comando (10) del giro de la rueda trasera directriz (5) para un vehículo de al menos tres ruedas directrices, que comprende medios para elaborar una consigna actual de giro de la rueda trasera (α2) en función del ángulo de giro de la rueda delantera (α1), de datos de desplazamiento del vehículo y de una consigna de giro de la rueda trasera, caracterizado por el hecho de que éste comprende:
un módulo de rechazo de perturbación asintótica (24) capaz de efectuar un lazo sobre una perturbación estimada (
un módulo de reacción positiva (25) capaz, cuando está activado, de elaborar, a partir de un modelo de vehículo de dos ruedas, una consigna de ángulo de giro (α2FF) de rueda trasera a partir de un valor de comando corregido (α2FF - transitorio) de la dinámica de la respuesta transitoria y de un valor de comando estático (α2FF - estático);
un módulo de comando (27) que recibe a la entrada la información de activación o de desactivación de los módulos de rechazo de perturbación (24) y de reacción positiva (25), elaborando dicho módulo de comando (27) una consigna de ángulo de giro de la rueda trasera (α2PP) que permite actuar sobre la dinámica de la respuesta transitoria y sobre la respuesta estática del vehículo;
y un medio (29) de activación y de desactivación selectiva de los módulos citados anteriormente (24, 25, 27).
6. Sistema según la reivindicación 5, caracterizado por el hecho de que el módulo (27) de comando comprende un bloque de comando por asignación de polos.
7. Sistema según una cualquiera de las reivindicaciones 5 a 6, caracterizado por el hecho de que el módulo de reacción positiva (25) es realimentado.
8. Sistema según una cualquiera de las reivindicaciones 5 a 7, caracterizado por el hecho de que el módulo de reacción positiva (25) comprende un elemento de cálculo de la velocidad de guiñada y de la desviación β al centro de gravedad del vehículo, a partir del modelo de vehículo de dos ruedas.
9. Sistema según una cualquiera de las reivindicaciones 5 a 8, caracterizado por el hecho de que el medio de activación y de desactivación selectiva (29) es de comando manual.
10. Sistema según una cualquiera de las reivindicaciones 5 a 9, caracterizado por el hecho de que el medio de activación y de desactivación selectiva (29) es de comando automático.
11. Vehículo (1) que comprende un chasis (2), al menos tres ruedas directrices unidas elásticamente al chasis, caracterizado por el hecho de que comprende un sistema de comando del giro de la rueda trasera directriz según una de las reivindicaciones 5 a 10.
Patentes similares o relacionadas:
PROCEDIMIENTO DE ACCIONAMIENTO DE UN VEHÍCULO DE CUATRO RUEDAS DIRECTRICES CON LA AYUDA DE UN DISPOSITIVO DE FRENADO INDIVIDUAL DE LAS RUEDAS, del 4 de Febrero de 2011, de RENAULT S.A.S.: Procedimiento de accionamiento de un vehículo, que comprende las etapas - cuando se detecta que la desviación sobrepasa un umbral predeterminado, […]
 DISPOSITIVO Y PROCEDIMIENTO DE VIGILANCIA DEL CONTROL DEL GIRO DE RUEDA TRASERA DIRECTRIZ, del 10 de Diciembre de 2010, de RENAULT SAS: Procedimiento de vigilancia del control del giro de rueda trasera directriz para un vehículo con al menos tres ruedas directrices, en el cual se compara una consigna de giro […]
DISPOSITIVO Y PROCEDIMIENTO DE VIGILANCIA DEL CONTROL DEL GIRO DE RUEDA TRASERA DIRECTRIZ, del 10 de Diciembre de 2010, de RENAULT SAS: Procedimiento de vigilancia del control del giro de rueda trasera directriz para un vehículo con al menos tres ruedas directrices, en el cual se compara una consigna de giro […]
 PROCEDIMIENTO Y SISTEMA DE CONTROL DEL GIRO DE RUEDA TRASERA DIRECTRIZ Y VEHICULO ASI EQUIPADO, del 1 de Diciembre de 2010, de RENAULT S.A.S.: Procedimiento de control del giro de rueda trasera directriz para un vehículo al menos con tres ruedas directrices, en el cual se estima […]
PROCEDIMIENTO Y SISTEMA DE CONTROL DEL GIRO DE RUEDA TRASERA DIRECTRIZ Y VEHICULO ASI EQUIPADO, del 1 de Diciembre de 2010, de RENAULT S.A.S.: Procedimiento de control del giro de rueda trasera directriz para un vehículo al menos con tres ruedas directrices, en el cual se estima […]
 PROCEDIMIENTO Y DISPOSITIVO PARA ESTABILIZAR UN VEHICULO, del 2 de Junio de 2010, de ROBERT BOSCH GMBH: Procedimiento para la estabilización de un vehículo de carretera , en particular de un vehículo de pasajeros, con un remolque , el cual es arrastrado […]
PROCEDIMIENTO Y DISPOSITIVO PARA ESTABILIZAR UN VEHICULO, del 2 de Junio de 2010, de ROBERT BOSCH GMBH: Procedimiento para la estabilización de un vehículo de carretera , en particular de un vehículo de pasajeros, con un remolque , el cual es arrastrado […]
 PROCEDIMIENTO Y DISPOSITIVO DE CONTROL DE ANGULO DE ORIENTACION DE RUEDA TRASERA DE UN VEHICULO AUTOMOVIL, del 6 de Abril de 2010, de RENAULT S.A.S.: Procedimiento de control de ángulo de orientación de rueda trasera de un vehículo automóvil que comprenda un eje de ruedas delanteras directrices, cuyo ángulo […]
PROCEDIMIENTO Y DISPOSITIVO DE CONTROL DE ANGULO DE ORIENTACION DE RUEDA TRASERA DE UN VEHICULO AUTOMOVIL, del 6 de Abril de 2010, de RENAULT S.A.S.: Procedimiento de control de ángulo de orientación de rueda trasera de un vehículo automóvil que comprenda un eje de ruedas delanteras directrices, cuyo ángulo […]
MECANISMO DE TRANSMISIÓN DE DIRECCIÓN A TODAS LAS RUEDAS DE UN VEHICULO, del 14 de Mayo de 2020, de PALACIOS BERETTA, Marco: El mecanismo ofrece una solución de transmisión del movimiento de dirección sincronizado a todas las ruedas del vehículo, o bien a las ruedas traseras sólo o a las […]
Dispositivo de asistencia para maniobras de atraque en una dársena, del 16 de Octubre de 2019, de NEWTL (Société par Actions Simplifiée): Vehículo de carretera que incluye ruedas delanteras montadas en un eje de dirección delantero y ruedas traseras montadas en un eje trasero […]
Método y sistema para un dispositivo de elevación que tiene ruedas independientemente dirigibles, del 2 de Octubre de 2019, de Xtreme Manufacturing, LLC: Un sistema de vehículo elevador de tijera que comprende un carro que incluye una pluralidad de conjuntos de ruedas independientemente dirigibles […]