PROCEDIMIENTO PARA LA REGULACIÓN POR PREDICCIÓN DE UN ACCIONAMIENTO LINEAL O BIEN DE UN COMPRESOR LINEAL ASÍ COMO ACCIONAMIENTO LINEAL O BIEN COMPRESOR LINEAL REGULADO POR PREDICCIÓN.
Procedimiento para la regulación por predicción de un accionamiento lineal (2),
que presenta un estator (4), un rotor (5) móvil en movimiento de ida y vuelta allí a lo largo de un eje de accionamiento (9) y una bobina de accionamiento (6) atravesada por una corriente de bobina, en particular para un compresor lineal (3), que presenta una carcasa de pistón (7) y un pistón de compresor (8) móvil en movimiento de ida y vuelta a lo largo de un eje de pistón (33), accionado por el accionamiento lineal (2), caracterizado porque la corriente de la bobina es regulada y, en concreto, de tal forma que la corriente real de la bobina y la corriente teórica de la bobina son esencialmente iguales, de manera que durante un proceso de estabilización, se controla la amplitud de la corriente de la bobina.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2007/050230.
H02P25/06ELECTRICIDAD. › H02PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02PCONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › H02P 25/00 Disposiciones o métodos para el control de motores de corriente alterna caracterizados por la clase de motor de corriente alterna o por detalles estructurales. › Motores lineales.
Clasificación PCT:
H02K33/04H02 […] › H02K MAQUINAS DINAMOELECTRICAS (relés dinamoeléctricos H01H 53/00; transformación de una potencia de entrada en DC o AC en una potencia de salida de choque H02M 9/00). › H02K 33/00 Motores con imán, inducido o sistema de bobinas de movimiento alternativo, oscilante o vibratorio (dispositivos de manipulación de la energía mecánica estructuralmente asociados a los motores H02K 7/00, p. ej. H02K 7/06). › en donde la frecuencia de funcionamiento está determinada por la frecuencia de una AC aplicada ininterrumpidamente.
H02P25/02H02P 25/00 […] › caracterizados por el tipo de motor.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
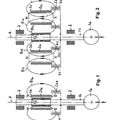
Procedimiento para la regulación por predicción de un accionamiento lineal o bien de un compresor lineal así como accionamiento lineal o bien compresor lineal regulado por predicción La invención se refiere a un procedimiento para la regulación de un accionamiento lineal, que presenta un estator, un rotor móvil en movimiento de ida y vuelta allí a lo largo de un eje de accionamiento y una bobina de accionamiento atravesada por una corriente de bobina, en particular para un compresor lineal, que presenta una carcasa de pistón y un pistón de compresor móvil en movimiento de ida y vuelta a lo largo de un eje de pistón, accionado por el accionamiento lineal, así como a un dispositivo que comprende un accionamiento lineal, que presenta un estator, un rotor móvil en movimiento de ida y vuelta allí a lo largo de un eje de accionamiento, una bobina de accionamiento atravesada por una corriente de bobina y un medio para la regulación de una corriente de bobina, en particular para un compresor lineal, que presenta el accionamiento lineal, la carcasa de pistón y un pistón de compresor móvil en movimiento de ida y vuelta allí a lo largo de un eje de pistón y que puede ser accionado por el accionamiento lineal, así como a un procedimiento para la refrigeración de un producto y/o para la compresión de un fluido. En un compresor lineal, el pistón del compresor móvil en movimiento de ida y vuelta a lo largo de un eje entre un primer punto de inversión y un segundo de inversión debe ser alojado o bien guiado en una dirección transversalmente al eje. Además, la energía cinética del pistón del compresor que se mueve en movimiento de ida y vuelta debe almacenarse temporalmente en los puntos de inversión, es decir, en los puntos, en los que se invierte la dirección del movimiento del pistón del compresor, para posibilitar una inversión lo más libre de pérdida posible del pistón del compresor. A través de la inversión de la dirección del movimiento, el pistón del compresor en una carcasa de pistón conduce a un movimiento de ida y vuelta oscilante, esencialmente de traslación. Con la ayuda del movimiento de ida y vuelta se lleva a cabo un proceso de compresión. Durante una conducción del pistón oscilante del compresor, para la consecución de un rendimiento lo más alto posible de compresor se pretende aproximar el pistón del compresor lo más cerca posible de una placa de válvula de la carcasa del pistón, para que e mantenga lo más pequeño posible un volumen muerto formado por la placa de la válvula. No obstante, en este caso, debe evitarse un choque del pistón del compresor en la placa de la válvula, puesto que un choque del pistón del compresor puede conducir a un daño del pistón del compresor o de la placa de la válvula. Además, se puede romper un vástago de pistón para la transmisión de la fuerza entre el pistón del compresor y el accionamiento lineal, lo que conduce de la misma manera a una incapacidad funcional del compresor lineal. Por este motivo, debería mantenerse siempre una distancia de seguridad entre el pistón del compresor y la placa de la válvula. Por lo tanto, el objetivo es configurar la oscilación del inducido de la manera más uniforme posible y con un volumen muerto lo más pequeño posible delante de la placa de la válvula, sin que el pistón del compresor choque en la placa de la válvula. Los accionamientos lineales conocidos requieren con frecuencia una sincronización exacta de los componentes mecánicos móviles individuales entre sí y requieren un frenado temporal de las partes móviles con el accionamiento lineal, para poder controlar el movimiento con suficiente precisión. No obstante, la sincronización fina del compresor es costosa y el frenado con el accionamiento lineal reduce su rendimiento. En la publicación DE 24 17 443 se publicar conectar una corriente de bobina del accionamiento lineal a través de un circuito convertidor (puente H) en fase con oscilación natural del inducido. Se conoce a partir de los documentos WO 01/48379 A1 y US 2003/0021693 A1 medir los instantes, en los que un pistón pasa por una posición predeterminada en la proximidad de un punto de inversión superior. La amplitud de la tensión en la bobina de accionamiento se adapta o bien se regula de acuerdo con la medición del tiempo, predeterminando con la ayuda de un puente H la tensión en la bobina de accionamiento. Los documentos WO 01/71186 A2 y WO 03/081040 A1 describen sensores de posición especiales en compresores lineales. El documento US5980211 publica un compresor lineal con una regulación de la corriente. Por lo tanto, el cometido de la presente invención es indicar un procedimiento para la regulación de un accionamiento lineal o bien de un compresor lineal así como un accionamiento lineal o bien un compresor linear, que comprende este accionamiento lineal, con lo que se puede regular eficientemente de la manera más precisa posible y con medios lo más sencillos posible un movimiento de ida y vuelta de un rotor o bien de un pistón de compresor, de manera que se incrementa en la mayor medida posible el rendimiento que se puede obtener durante el accionamiento o bien durante una compresión. Además, un cometido es indicar un procedimiento especial para la refrigeración de un producto o bien para la compresión de un fluido, que trabaja de manera fiable y con poca energía con un rendimiento lo más grande posible. Este cometido se soluciona de acuerdo con la invención por medio del procedimiento para la regulación de un accionamiento lineal o bien de un compresor lineal de acuerdo con la reivindicación 1, y por medio del dispositivo 2 E07712011 10-11-2011 que comprende un accionamiento lineal o bien un compresor lineal de acuerdo con la reivindicación 13. Otras configuraciones ventajosas y desarrollos, así como una aplicación para la refrigeración de un producto y/o para la compresión de un fluido, son objeto de las reivindicaciones dependientes respectivas. El procedimiento de acuerdo con la invención para la regulación de un accionamiento lineal, que presenta un estator, un rotor móvil en movimiento de ida y vuelta allí a lo largo de un eje de accionamiento y una bobina de accionamiento atravesada por una corriente de bobina, en particular para un compresor lineal, que presenta una carcasa de pistón y un pistón de compresor móvil en movimiento de ida y vuelta a lo largo de un eje de pistón, accionado por el accionamiento lineal, prevé que la corriente de la bobina sea regulada y, en concreto, de tal forma que la corriente real de la bobina y la corriente teórica de la bobina sean esencialmente iguales, de manera que durante un proceso de estabilización, se controla la amplitud de la corriente de la bobina. A través de la utilización de la corriente de la bobina como variable de regulación se pueden compensar las oscilaciones de la tensión de la red a través del regulador de la corriente. Por lo tanto, las oscilaciones externas así como internas de la tensión no conducen directamente a una modificación del campo magnético en el accionamiento lineal, con lo que se consigue una precisión mucho más alta durante la conducción del rotor o bien del pistón del compresor. De esta manera se consigue, en particular, una exactitud más alta del posicionamiento, que conduce en conexión con un compresor lineal a un rendimiento mejorado en virtud de un volumen muerto reducido para un fluido comprimible. El control mejorado del movimiento permite, por ejemplo, reducir la distancia de seguridad entre un pistón de compresor y una placa de válvula en el compresor lineal, y las influencias de interferencia de baja frecuencia sobre la oscilación del inducido o bien del pistón, que proceden de oscilaciones en el circuito de refrigeración, son muy lentas en comparación con un periodo de oscilación y se pueden corregir a través de una adaptación correspondiente de la regulación de la corriente. En el procedimiento, se pueden tener en cuenta también procesos de estabilización, para que la diferencia entre la corriente real de la bobina y la corriente teórica de la bobina se mantenga pequeña también en los transientes eléctricos por ejemplo en fases de corriente. En el procedimiento, la corriente real de la bobina se utiliza como variable de regulación y se compara con una corriente teórica. El resultado de esta comparación se alimenta en forma de una diferencia de regulación a un miembro de regulación, con lo que la corriente real de la bobina se adapta a la corriente teórica de la bobina. A través de esta regulación de la corriente se evita con seguridad un accionamiento a contra fase. A través de la evitación de un accionamiento a contra fase se excluye un frenado del movimiento de ida y vuelta a través del accionamiento lineal. Como consecuencia, el movimiento del accionamiento lineal es más eficiente y... [Seguir leyendo]
Reivindicaciones:
1.- Procedimiento para la regulación por predicción de un accionamiento lineal (2), que presenta un estator (4), un rotor (5) móvil en movimiento de ida y vuelta allí a lo largo de un eje de accionamiento (9) y una bobina de accionamiento (6) atravesada por una corriente de bobina, en particular para un compresor lineal (3), que presenta una carcasa de pistón (7) y un pistón de compresor (8) móvil en movimiento de ida y vuelta a lo largo de un eje de pistón (33), accionado por el accionamiento lineal (2), caracterizado porque la corriente de la bobina es regulada y, en concreto, de tal forma que la corriente real de la bobina y la corriente teórica de la bobina son esencialmente iguales, de manera que durante un proceso de estabilización, se controla la amplitud de la corriente de la bobina. 2.- Procedimiento de acuerdo con la reivindicación 1, caracterizado porque se determina una corriente teórica de la bobina en función de una posición real momentánea y/o futura del rotor (5) o bien del pistón de compresor (8). 3.- Procedimiento de acuerdo con la reivindicación 2, caracterizado porque la posición real momentánea y/o futura del rotor (5) o bien del pistón del compresor (8) se determina en función de los últimos 2 a 20, en particular 4 a 10, periodos de oscilación. 4.- Procedimiento de acuerdo con la reivindicación 3, caracterizada porque la posición real futura se anticipa teniendo en cuenta una tendencia del movimiento de ida y vuelta durante los últimos 2 a 20, en particular 4 a 10, periodos de oscilación. 5.- Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque se anticipa una corriente real de la bobina potencial futura y se regula la corriente teórica momentánea de la bobina teniendo en cuenta la previsión. 6.- Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado por las siguientes etapas: - detección de un primer instante, en el que el rotor (5) y/o el pistón del compresor (8) se mueven por delante de un lugar (11) durante su movimiento de ida, - detección de un segundo instante, en el que el rotor (5) y/o el pistón del compresor (8) se mueven por delante del primer lugar (11) en su movimiento de vuelta, - detección de un tercer instante, en el que el rotor (5) y/o el pistón del compresor (8) se mueven por delante de un segundo lugar (12), desplazado a lo largo del eje (9, 33) con respecto al primer lugar (11), en su movimiento de ida, - detección de un cuarto instante, en el que el rotor (5) y/o el pistón del compresor (8) se mueven por delante de un segundo lugar (12), desplazado a lo largo del eje (9, 33) con respecto al primer lugar (11), en su movimiento de vuelta, - cálculo de una posición real momentánea y/o futura del rotor (5) y/o del pistón del compresor (8) por medio de interpolación y/o extrapolación a partir de los instantes, - comparación de la posición real calculada con una curva de movimiento teórica predeterminada, y - activación del rotor (5) y/o del pistón del compresor (8) de acuerdo con el resultado de la comparación. 7.- Procedimiento de acuerdo con la reivindicación 6, caracterizado porque la interpolación y/o extrapolación se realizan con la ayuda de funciones de aproximación, en particular funciones de circuito como funciones de coseno o de seno, polinomios y esplines. 8.- Procedimiento de acuerdo con la reivindicación 7, caracterizado porque el cálculo se realiza con la ayuda de una primera función de aproximación, en particular de una primera función circular, con una primera fase, frecuencia y/o amplitud, para el movimiento de ida del rotor (5) o bien del pistón del compresor (8) y de una segunda función de aproximación, en particular de una segunda función circular con una segunda fase, frecuencia y/o amplitud, para el movimiento de vuelta del rotor (5) o bien del pistón del compresor (8). 9.- Procedimiento de acuerdo con una de las reivindicaciones anteriores 6 a 8, caracterizado porque se detectan otros instantes, en los que el rotor (5) y/o el pistón del compresor (8) se mueven por delante de otros lugares (24) y se tienen en cuenta en la regulación. 10.- Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque la corriente de la bobina se conmuta con la ayuda de un puente H (19). 11.- Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque la bobina de accionamiento (6) es activada con una señal rectangular, de manera que especialmente la relación de exploración temporal está en un intervalo de 73 % a 87 %, en particular en un intervalo de 78 % a 82 %. 12 E07712011 10-11-2011 12.- Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado porque durante el proceso de estabilización, se controla la amplitud de la corriente de la bobina de tal manera que se incrementa de forma monótona, con preferencia lineal, pasando, en particular, un funcionamiento controlado a un funcionamiento regulado, tan pronto como la amplitud de la corriente y/o la amplitud de la oscilación del movimiento de ida y vuelta del rotor (5) y/o del pistón del compresor (8) excede un valor predeterminado, de manera que se regula, en particular, en primer lugar a un primer punto de inversión y a continuación a un segundo punto de inversión del movimiento de ida y vuelta. 13.- Dispositivo (1) que comprende un accionamiento lineal (2), que presenta un estator (4), un rotor (5) móvil en movimiento de ida y vuelta allí a lo largo de un eje de accionamiento (9), una bobina de accionamiento (6) atravesada por una corriente de bobina y un medio (10) para la regulación por predicción de una corriente de bobina, en particular para un compresor lineal (3), que presenta el accionamiento lineal (2), una carcasa de pistón (7) y un pistón de compresor (8) móvil en movimiento de ida y vuelta allí a lo largo de un eje de pistón (33) y que puede ser accionado por el accionamiento lineal (2), caracterizado porque con el medio (10) para la regulación por predicción de la corriente de la bobina se puede regular la corriente de la bobina y, en concreto, de tal manera que la corriente real de la bobina y la corriente teórica de la bobina son esencialmente iguales, de manera que durante un proceso de estabilización se controla la amplitud de la corriente de la bobina. 14.- Dispositivo (1) de acuerdo con la reivindicación 13, caracterizado porque el medio (10) para la regulación de la corriente de la bobina presenta al menos una de las siguientes características (ß1) a (ß4): (ß1) está previsto un medio (13) para la previsión de una corriente real futura de la bobina y la corriente real momentánea de la bobina es regulable teniendo en cuenta la previsión; (ß2) está previsto un medio (34) para la determinación de una corriente teórica de la bobina y se puede determinar una corriente teórica de la bobina en función de una posición real momentánea y/o futura del rotor (5) o bien del pistón del compresor (8); (ß3) está previsto un medio (13) para la previsión de una corriente real futura de la bobina, con la que se puede determinar la posición real momentánea y/o futura del rotor (5) o bien del pistón del compresor (8) en función de los últimos 2 a 20, en particular 4 a 10, periodos de oscilación; (ß4) está previsto un medio (13) para la previsión de una corriente real futura de la bobina, con la que se puede anticipar la posición real futura teniendo en cuenta una tendencia del movimiento de ida y vuelta del rotor (5) y/o del pistón del compresor (8) sobre los últimos 2 a 20, en particular 4 a 10, periodos de oscilación. 15.- Dispositivo (1) de acuerdo con la reivindicación 13 ó 14, que comprende, además: - un primer medio de detección (14) para la detección de un primer instante, en el que el rotor (5) y/o el pistón del compresor (8) se mueven por delante de un primer lugar (11) en su movimiento de ida, y para la detección de un segundo instante, en el que el rotor (5) y/o el pistón del compresor (8) se mueve por delante del primer lugar (11) durante su movimiento de vuelta, - un segundo medio de detección (15) para la detección de un tercer instante, en el que el rotor (5) y/o el pistón del compresor (8) se mueven por delante de un segundo lugar (12) a lo largo del eje (9, 33), desplazado con respecto al primer lugar (11), en su movimiento de ida, y para la detección de un cuarto instante, en el que el rotor (5) y/o el pistón del compresor (8) se mueven por delante del segundo lugar (12) a lo largo del eje (9, 33), desplazado con respecto al primer lugar (11), en su movimiento de ida, - un medio de cálculo (16) para el cálculo de una posición momentánea y/o futura del rotor (5) y/o del pistón del compresor (8) por medio de interpolación o bien extrapolación a partir de los instantes momentáneos y/o pasados, - un medio de comparación (17) para la comparación de la posición calculada con una curva de movimiento predeterminada, y - un medio de control (18) para el control del rotor (5) y/o del pistón del compresor (8) de acuerdo con el resultado de la comparación. 16.- Dispositivo (1) de acuerdo con la reivindicación 15, caracterizado por otros medios de detección (23) para la detección de otros instantes, en los que el rotor (5) y/o el pistón del compresor (8) se mueven por delante de otro lugar (24) durante un movimiento de ida y vuelta, respectivamente. 17.- Dispositivo (1) de acuerdo con una de las reivindicaciones anteriores 13 a 16, caracterizado porque está previsto un puente H (19) para la conmutación de la corriente de la bobina. 13 E07712011 10-11-2011 18.- Dispositivo (1) de acuerdo con una de las reivindicaciones anteriores 13 a 17, caracterizado porque la regulación prevé una relación de exploración temporal en un intervalo de 73 % a 87 %, en particular en un intervalo de 78 % a 82 %. 19.- Dispositivo (1) de acuerdo con una de las reivindicaciones anteriores 13 a 18, caracterizado porque el primer lugar (11) y/o el segundo lugar (12) se encuentran en la proximidad de los puntos de inversión (21, 22) del movimiento de ida y vuelta, en particular en un intervalo de 73 % a 87 %, con preferencia en un intervalo de 78 % a 82 %, de la amplitud del movimiento de ida y vuelta. 20.- Dispositivo (1) de acuerdo con una de las reivindicaciones anteriores 13 a 19, caracterizado porque el medio de cálculo presenta un medio de promedio, con el que se puede determinar una posición real futura en función de los últimos 2 a 20, en particular 4 a 10, periodos de oscilación. 21.- Dispositivo (1) de acuerdo con una de las reivindicaciones anteriores 13 a 20, caracterizado porque es un aparato de refrigeración (20), en particular, un frigorífico y/o un congelador o una instalación de climatización. 22.- Dispositivo (1) de acuerdo con una de las reivindicaciones anteriores 13 a 21, caracterizado porque al menos uno de los medios de detección (14, 15) para la detección de los instantes, en los que el rotor (5) y/o el pistón del compresor (8) se mueven por delante de un lugar (11, 12) durante su movimiento de ida, está dispuesto en un lugar entre 20 % y 10 %, en particular entre 17 % y 12 %, de la distancia entre los puntos de inversión (21, 22) delante de su punto de inversión (21, 22). 23.- Procedimiento para la refrigeración de un producto (25) y/o para la compresión de un fluido (32), caracterizado porque utiliza un dispositivo (1) de acuerdo con una de las reivindicaciones 13 a 21 y/o aplica un procedimiento de regulación de acuerdo con una de las reivindicaciones 1 a 12. 14 E07712011 10-11-2011 E07712011 10-11-2011 16 E07712011 10-11-2011 17 E07712011 10-11-2011 18 E07712011 10-11-2011 19 E07712011 10-11-2011
Patentes similares o relacionadas:
PROCEDIMIENTO PARA EL MICROFORJADO EN FRIO DE CUALESQUIERA SUPERFICIES TRIDIMENSIONALES DE FORMA LIBRE, del 29 de Julio de 2010, de LOCKER, CHRISTIAN: Procedimiento electromagnético para el tratamiento, el pulido y el endurecimiento en frío de la superficie de herramientas, partes de máquinas y otras […]
DISPOSITIVO PARA LA EXCITACION DE UN ELECTROIMAN, EN PARTICULAR PARA EL ACCIONAMIENTO DE BOMBAS, del 23 de Noviembre de 2009, de SEKO BONO EXACTA S.P.A: Dispositivo para la excitación de un electroimán , en particular para el accionamiento de bombas, comprendiendo un devanado primario y un elemento móvil que […]
Dispositivo de detección de tope posterior en un accionador lineal, del 6 de Mayo de 2019, de VIRAX: Accionador lineal que consta de medios de accionamiento de un equipo móvil entre una posición de reposo y una posición activa, y un módulo electrónico […]
Circuito de conmutación de bobina para generador eléctrico lineal, del 13 de Mayo de 2015, de OCEAN POWER TECHNOLOGIES, INC.: Un generador eléctrico lineal (LEG) que comprende:
un ensamble de bobina que comprende secciones N de bobinas de inducción (L1-L8) dispuestas linealmente […]
Compresor alternativo, del 15 de Enero de 2014, de LG ELECTRONICS INC.: Un compresor alternativo, que comprende:
un recipiente cerrado ;
un cilindro instalado dentro del recipiente cerrado;
un motor lineal para […]
Compresor de gas accionado mediante un motor lineal y que tiene un detector de impacto entre un cilindro y un pistón, procedimiento de detección, del 28 de Mayo de 2013, de WHIRLPOOL S.A.: Procedimiento para detectar un impacto entre un cilindro y un pistón accionado por un motor lineal, quecomprende las etapas de:
i) […]
Motor eléctrico, del 23 de Mayo de 2012, de HONDA MOTOR CO., LTD.: Un motor electrico incluyendo:
una primera estructura incluyendo una fila de polos magneticos, estando formada dicha fila de polosmagneticos […]
MOTOR LINEAL, COMPRESOR LINEAL, MÉTODO PARA CONTROLAR UN COMPRESOR LINEAL, SISTEMA DE REFRIGERACIÓN Y COMPRESOR LINEAL QUE CONTROLA UN SISTEMA, del 20 de Septiembre de 2011, de WHIRLPOOL S.A.: Compresor lineal aplicable a un sistema de refrigeración , comprendiendo el compresor lineal un pistón accionado por un motor […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 PROCEDIMIENTO PARA EL MICROFORJADO EN FRIO DE CUALESQUIERA SUPERFICIES TRIDIMENSIONALES DE FORMA LIBRE, del 29 de Julio de 2010, de LOCKER, CHRISTIAN: Procedimiento electromagnético para el tratamiento, el pulido y el endurecimiento en frío de la superficie de herramientas, partes de máquinas y otras […]
PROCEDIMIENTO PARA EL MICROFORJADO EN FRIO DE CUALESQUIERA SUPERFICIES TRIDIMENSIONALES DE FORMA LIBRE, del 29 de Julio de 2010, de LOCKER, CHRISTIAN: Procedimiento electromagnético para el tratamiento, el pulido y el endurecimiento en frío de la superficie de herramientas, partes de máquinas y otras […] DISPOSITIVO PARA LA EXCITACION DE UN ELECTROIMAN, EN PARTICULAR PARA EL ACCIONAMIENTO DE BOMBAS, del 23 de Noviembre de 2009, de SEKO BONO EXACTA S.P.A: Dispositivo para la excitación de un electroimán , en particular para el accionamiento de bombas, comprendiendo un devanado primario y un elemento móvil que […]
DISPOSITIVO PARA LA EXCITACION DE UN ELECTROIMAN, EN PARTICULAR PARA EL ACCIONAMIENTO DE BOMBAS, del 23 de Noviembre de 2009, de SEKO BONO EXACTA S.P.A: Dispositivo para la excitación de un electroimán , en particular para el accionamiento de bombas, comprendiendo un devanado primario y un elemento móvil que […]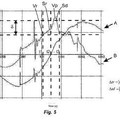 Compresor de gas accionado mediante un motor lineal y que tiene un detector de impacto entre un cilindro y un pistón, procedimiento de detección, del 28 de Mayo de 2013, de WHIRLPOOL S.A.: Procedimiento para detectar un impacto entre un cilindro y un pistón accionado por un motor lineal, quecomprende las etapas de:
i) […]
Compresor de gas accionado mediante un motor lineal y que tiene un detector de impacto entre un cilindro y un pistón, procedimiento de detección, del 28 de Mayo de 2013, de WHIRLPOOL S.A.: Procedimiento para detectar un impacto entre un cilindro y un pistón accionado por un motor lineal, quecomprende las etapas de:
i) […]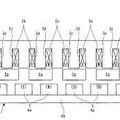 Motor eléctrico, del 23 de Mayo de 2012, de HONDA MOTOR CO., LTD.: Un motor electrico incluyendo:
una primera estructura incluyendo una fila de polos magneticos, estando formada dicha fila de polosmagneticos […]
Motor eléctrico, del 23 de Mayo de 2012, de HONDA MOTOR CO., LTD.: Un motor electrico incluyendo:
una primera estructura incluyendo una fila de polos magneticos, estando formada dicha fila de polosmagneticos […]