PROCEDIMIENTO PARA LA RECOLOCACION DE UN ARTICULO CILINDRICO EN UN ALMACEN DE ESTANTERIAS AUTOMATIZADO MEDIANTE UNA PINZA QUE PRESENTA UN CABEZAL DE ASPIRACION.
Procedimiento para la recolocación de un artículo (2) con forma cilíndrica en un almacén de estanterías automatizado mediante una pinza aspirante (3),
que presenta un cabezal de aspiración (4), de un aparato de manejo, según el cual:
a) el cabezal de aspiración (4) se acerca a la superficie lateral (6) curvada de un artículo (2) que se encuentra en una primera superficie de almacenamiento (1), generándose la corriente de aspiración antes de entrar el cabezal de aspiración (4) en contacto con la superficie lateral (6),
b) el artículo (2) se retira después de la aspiración mediante la pinza aspirante (3) a una mesa de soporte (5) del aparato de manejo,
c) la mesa de soporte (5) del aparato de manejo se desplaza hasta por delante de una segunda superficie de almacenamiento,
d) el artículo se empuja mediante la pinza aspirante, con el cabezal de aspiración fijado por aspiración, de la mesa de soporte a la segunda superficie de almacenamiento,
e) se cancela el vacío parcial de aspiración en el cabezal de aspiración y
f) el cabezal de aspiración se retira junto con la pinza aspirante
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07102741.
Solicitante: ROWA AUTOMATISIERUNGSSYSTEME GMBH.
Nacionalidad solicitante: Alemania.
Dirección: ROWASTRASSE 2-4,53539 KELBERG.
Inventor/es: KLAPPERICH,ANDREAS.
Fecha de Publicación: .
Fecha Solicitud PCT: 20 de Febrero de 2007.
Fecha Concesión Europea: 23 de Septiembre de 2009.
Clasificación Internacional de Patentes:
- B65G1/04B8
Clasificación PCT:
- B65G1/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 1/00 Almacenamiento de objetos, individualmente o con un cierto orden, en almacenes o depósitos (combinaciones de transportadores en almacenes, tiendas o talleres, B65G 37/00; apilado de objetos B65G 57/00; sacado de objetos de pilas B65G 59/00; máquinas de carga B65G 65/02). › mecánicos.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Procedimiento para la recolocación de un artículo cilíndrico en un almacén de estanterías automatizado mediante una pinza que presenta un cabezal de aspiración.
La invención se refiere a un procedimiento para la recolocación de un artículo con forma cilíndrica en un almacén de estanterías automatizado mediante una pinza que presenta un cabezal de aspiración.
Un almacén de estanterías automatizado para almacenar embalajes de medicamentos en anaqueles planos se conoce por ejemplo por el documento DE 195 09 951 C2. Con ayuda de un aparato de manipulación desplazable por delante de las estanterías, los embalajes de medicamentos se almacenan en los anaqueles y se retiran de nuevo de estos anaqueles. El aparato de mando presenta una pinza aspirante con un cabezal de aspiración y una mesa de soporte con un par de mordazas de sujeción y guía ajustables una respecto a otra. Para recolocar un embalaje de medicamento de un primer lugar en un anaquel a un segundo lugar en el mismo o en otro anaquel, el aparato de manipulación se desplaza al primer lugar en el cual se encuentra el embalaje de medicamento a recolocar. La mesa de soporte del aparato de manipulación se posiciona de tal manera delante del anaquel que la superficie de la mesa de soporte esté alineada con la superficie del anaquel o esté dispuesta ligeramente más abajo. A continuación se coloca el cabezal de aspiración de la pinza aspirante en la superficie frontal del embalaje a retirar. Se aspira el embalaje de medicamento y la pinza aspirante se mueve hacia atrás, por lo que el embalaje de medicamento se retira del anaquel a la mesa de soporte del aparato de manipulación. En los almacenes de estanterías automatizados conocidos del tipo descrito en el documento de patente, la pinza aspirante se presiona contra la superficie frontal del embalaje de medicamento a retirar, siendo posible desplazar el embalaje sobre el anaquel en dirección opuesta al aparato de manipulación contra un tope en el lado trasero, siempre que no se haya detectado anteriormente mediante la formación de un vacío parcial que el embalaje de medicamento está firmemente fijado por aspiración. Cuando el embalaje de medicamento está completamente fijado por aspiración, la pinza aspirante puede retirarlo a la mesa de soporte del aparato de manipulación.
Los embalajes manipulados según el documento de patente mediante el aparato de manipulación en los correspondientes almacenes de medicamentos automatizados tienen básicamente una forma de paralelepípedo rectangular y presentan una superficie frontal en lo esencial plana en la que la pinza aspirante puede fijarse mediante aspira- ción.
Para poder manipular mediante un aparato de manipulación también artículos que no tienen una forma de paralelepípedo rectangular y son por ejemplo redondos, poligonales o de forma irregular, por ejemplo en el documento de modelo de utilidad DE 299 04 557 U1 se propone complementar la pinza aspirante mediante mordazas de sujeción que pueden desplazarse sobre el anaquel, estando las superficies interiores de las mordazas de sujeción provistas de un recubrimiento elástico (por ejemplo espuma de plástico) de tal manera que estas superficies se deforman durante la aproximación de las mordazas de sujeción a las superficies laterales del artículo a recoger y se adaptan al contorno exterior del artículo apretado entre las mordazas, por lo que es posible recoger el artículo con seguridad incluso cuando, debido a su contorno, no es posible fijar mediante aspiración la pinza aspirante colocada en la superficie frontal de un artículo. La solución propuesta con el modelo de utilidad presenta la desventaja de que entre dos artículos colocados uno al lado de otro deben introducirse mordazas de sujeción relativamente resistentes con un recubrimiento interior relativamente grueso, por lo que aumenta la distancia mínima que debe observarse entre los artículos que se encuentran en el anaquel.
Del estado de la técnica se desprende que los especialistas en esta materia parten de la suposición de que una pinza aspirante sólo puede emplearse para la recolocación de un artículo cuando el articulo presenta una superficie frontal en lo esencial plana en el lugar donde debe acoplarse la pinza aspirante.
El objetivo de la invención consiste en ampliar las posibilidades de empleo de la pinza aspirante y en evitar distancias mínimas aumentadas entre los artículos.
Este objetivo se consigue conforme a la invención mediante un procedimiento con las características de la reivindicación 1. Según el procedimiento conforme a la invención para la recolocación de un artículo con forma cilíndrica en un almacén de estanterías automatizado mediante una pinza aspirante de un aparato de manejo que presenta un cabezal de aspiración, el cabezal de aspiración se aproxima en primer lugar a la superficie exterior curvada del artículo situado en una primera superficie de almacenamiento, generándose la corriente de aspiración antes de entrar el cabezal de aspiración en contacto con la superficie lateral. Sorprendentemente se ha demostrado que con un modo de servicio de este tipo se facilita una aspiración segura incluso en superficies laterales cilíndricas curvadas de forma relativamente fuerte. Después de la aspiración se tira del artículo mediante la pinza aspirante para desplazarlo a una mesa de soporte del aparato de manejo. La mesa de soporte se desplaza a continuación hasta por delante de una segunda superficie de almacenamiento y, con el cabezal de aspiración fijado por aspiración, el artículo se empuja mediante la pinza aspirante a la segunda superficie de almacenamiento. Sólo a continuación se cancela el vacío parcial de aspiración en el cabezal de aspiración y se retira el cabezal de aspiración junto con la pinza aspirante. Por lo tanto, la pinza aspirante no se usa sólo como empujador al almacenar el artículo de la mesa de soporte del aparato de manejo a la segunda superficie de almacenamiento, tal como ha sido usual según el estado de la técnica. Se ha demostrado que con el procedimiento según la invención se facilita una recolocación segura de artículos con forma cilíndrica, en particular de botellas de medicamentos.
En un perfeccionamiento ventajoso del procedimiento según la invención, el vacío parcial de aspiración en el cabezal de aspiración se cancela más rápidamente cuando se genera una corriente de soplado opuesta a la corriente de aspiración. Esta conmutación de corriente de aspiración a corriente de soplado tiene lugar cuando el artículo con forma cilíndrica se encuentra en el lugar deseado en la segunda superficie de almacenamiento. Cuando para la generación de la presión de aspiración se usa por ejemplo una bomba de paletas, la conmutación puede realizarse mediante una inversión del motor de accionamiento. La conmutación de corriente puede efectuarse también con una bomba empleada de manera uniforme con ayuda de un control de válvulas.
La invención se explica a continuación más detalladamente con referencia a un ejemplo de realización representado en el dibujo. En los dibujos se muestran:
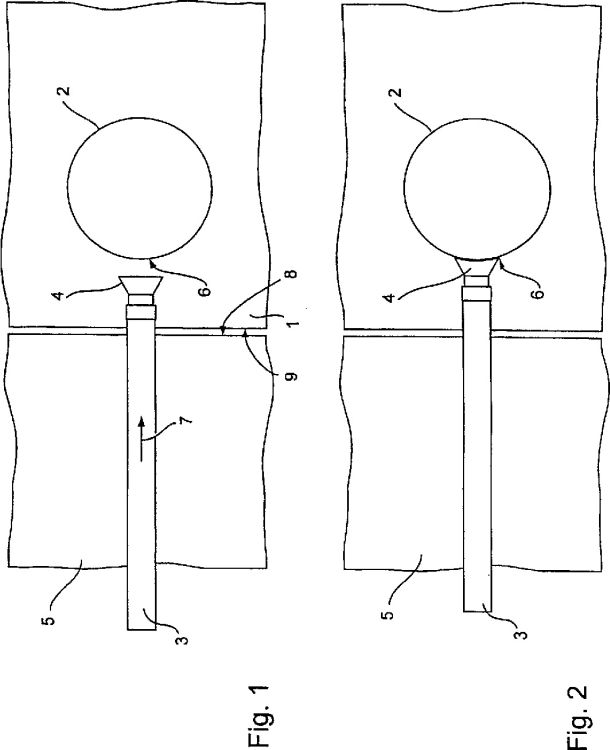
Fig. 1: Representación esquemática de una primera fase de movimiento de la aproximación de una pinza aspirante de un aparato de manejo a un artículo almacenado en un anaquel.
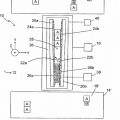
Fig. 2: Una segunda fase de movimiento en la que la pinza aspirante está fijada por aspiración en el artículo.
En la figura 1 se muestra una vista esquemática en planta desde arriba de una sección 1 de un anaquel en el cual está almacenado un artículo 2 con una superficie lateral cilíndrica, por ejemplo una botella que contiene un medicamento. En las secciones del estante 1 no representado en la figura 1 puede encontrarse una multiplicidad de otros embalajes de medicamentos con forma de paralelepípedo rectangular o de botellas cilíndricas. Encima y/o debajo del estante pueden encontrarse en paralelo otros anaqueles.
Para la extracción de los artículos de los anaqueles y el almacenamiento de los artículos en los anaqueles se usa un aparato de manejo desplazable horizontal y verticalmente por delante de los anaqueles y controlado por un ordenador. El ordenador que controla el aparato de manejo dispone de las informaciones acerca del tipo y lugar de almacenamiento de los artículos almacenados en el almacén de estanterías.
En la figura 1 se muestran esquemáticamente partes de un aparato de manejo posicionado delante del anaquel 1, es decir, una pinza aspirante 3 con un cabezal de aspiración 4 y una parte de una mesa de soporte 5. La pinza aspirante 3 es desplazable en dirección horizontal y transversalmente...
Reivindicaciones:
1. Procedimiento para la recolocación de un artículo (2) con forma cilíndrica en un almacén de estanterías automatizado mediante una pinza aspirante (3), que presenta un cabezal de aspiración (4), de un aparato de manejo, según el cual:
- a) el cabezal de aspiración (4) se acerca a la superficie lateral (6) curvada de un artículo (2) que se encuentra en una primera superficie de almacenamiento (1), generándose la corriente de aspiración antes de entrar el cabezal de aspiración (4) en contacto con la superficie lateral (6),
- b) el artículo (2) se retira después de la aspiración mediante la pinza aspirante (3) a una mesa de soporte (5) del aparato de manejo,
- c) la mesa de soporte (5) del aparato de manejo se desplaza hasta por delante de una segunda superficie de almacenamiento,
- d) el artículo se empuja mediante la pinza aspirante, con el cabezal de aspiración fijado por aspiración, de la mesa de soporte a la segunda superficie de almacenamiento,
- e) se cancela el vacío parcial de aspiración en el cabezal de aspiración y
- f) el cabezal de aspiración se retira junto con la pinza aspirante.
2. Procedimiento de acuerdo con la reivindicación 1 caracterizado porque en el paso e) el vacío parcial de aspiración se cancela más rápidamente generándose una corriente de soplado opuesta a la corriente de aspiración.
Patentes similares o relacionadas:
DISPOSITIVO PARA TRANSFERIR ARTÍCULOS, del 28 de Diciembre de 2011, de VON LIECHTENSTEIN, ALEXANDER: Dispositivo para transferir artículos , con una mesa que presenta un plano de apoyo para un artículo , que presenta al menos un primer canto de mesa y […]
DISPOSITIVO PARA LA TRANSFERENCIA DE ARTÍCULOS, del 28 de Diciembre de 2011, de VON LIECHTENSTEIN, ALEXANDER: Dispositivo para la transferencia de artículos , con una cabeza de dispositivo , en la que está previsto al menos un elemento de fijación para la fijación […]
SISTEMA Y PROCESO PARA EL ALMACENAMIENTO Y LA MANIPULACIÓN DE PRODUCTOS, EN PARTICULAR PRODUCTOS EMPAQUETADOS, del 2 de Diciembre de 2011, de VON LIECHTENSTEIN, ALEXANDER: Sistema para el almacenamiento y la manipulación de productos , en particular, productos empaquetados , que comprende al menos una superficie para el almacenamiento […]
 PINZA PARA UN APARATO DE CONTROL DE ESTANTERÍAS Y PROCEDIMIENTO DE FUNCIONAMIENTO DE LA PINZA DEL APARATO DE CONTROL DE ESTANTERÍAS, del 19 de Abril de 2011, de RIEDL, MARKUS ERICH: Aparato de control de estanterías para productos almacenados (A, B), los cuales se almacenan sobre unas bases de estanterías (18, 18') de una estantería (14, 14') o se extraen […]
PINZA PARA UN APARATO DE CONTROL DE ESTANTERÍAS Y PROCEDIMIENTO DE FUNCIONAMIENTO DE LA PINZA DEL APARATO DE CONTROL DE ESTANTERÍAS, del 19 de Abril de 2011, de RIEDL, MARKUS ERICH: Aparato de control de estanterías para productos almacenados (A, B), los cuales se almacenan sobre unas bases de estanterías (18, 18') de una estantería (14, 14') o se extraen […]
 DISPOSITIVO DE ALMACENAMIENTO PARA MERCANCIAS AL DETALLE Y PROCEDIMIENTO CORRESPONDIENTE, del 11 de Abril de 2011, de ROWA AUTOMATISIERUNGSSYSTEME GMBH: Dispositivo de almacenamiento para mercancías al detalle, con una pluralidad de fondos de almacenamiento dispuestos de forma superpuesta con superficies […]
DISPOSITIVO DE ALMACENAMIENTO PARA MERCANCIAS AL DETALLE Y PROCEDIMIENTO CORRESPONDIENTE, del 11 de Abril de 2011, de ROWA AUTOMATISIERUNGSSYSTEME GMBH: Dispositivo de almacenamiento para mercancías al detalle, con una pluralidad de fondos de almacenamiento dispuestos de forma superpuesta con superficies […]
 ROBOT DE ESTANTERÍA PARA CARTUCHOS DE MERCANCÍAS ALARGADAS, del 4 de Abril de 2011, de REMMERT GMBH & CO. KG: Robot de estantería para cartuchos, particularmente cartuchos de mercancías alargadas , con al menos un soporte de cartuchos horizontal, […]
ROBOT DE ESTANTERÍA PARA CARTUCHOS DE MERCANCÍAS ALARGADAS, del 4 de Abril de 2011, de REMMERT GMBH & CO. KG: Robot de estantería para cartuchos, particularmente cartuchos de mercancías alargadas , con al menos un soporte de cartuchos horizontal, […]
 DISPOSITIVO DE TRANSPORTE EXTENSIBLE Y SISTEMA DE TRANSPORTE DE ALIMENTOS QUE PRESENTA EL MISMO, del 7 de Enero de 2011, de MAYEKAWA MFG. CO., LTD.: Instalación de transferencia flexible en la que un transportador de transferencia está compuesto de manera que una pluralidad de piezas de transferencia comprendiendo […]
DISPOSITIVO DE TRANSPORTE EXTENSIBLE Y SISTEMA DE TRANSPORTE DE ALIMENTOS QUE PRESENTA EL MISMO, del 7 de Enero de 2011, de MAYEKAWA MFG. CO., LTD.: Instalación de transferencia flexible en la que un transportador de transferencia está compuesto de manera que una pluralidad de piezas de transferencia comprendiendo […]
 APARATO AUTOMATICO PARA ALMACENAR Y DISTRIBUIR MEDICACION EMPAQUETADA Y OTROS PEQUEÑOS ELEMENTOS, del 7 de Diciembre de 2010, de OMNICELL, INC: Sistema para almacenar automáticamente y distribuir elementos individuales, comprendiendo: un recipiente para almacenar temporalmente una pluralidad de elementos […]
APARATO AUTOMATICO PARA ALMACENAR Y DISTRIBUIR MEDICACION EMPAQUETADA Y OTROS PEQUEÑOS ELEMENTOS, del 7 de Diciembre de 2010, de OMNICELL, INC: Sistema para almacenar automáticamente y distribuir elementos individuales, comprendiendo: un recipiente para almacenar temporalmente una pluralidad de elementos […]