PROCEDIMIENTO, PROGRAMA DE ORDENADOR Y ARCHIVO PARA GENERAR IMAGENES QUE REPRODUCEN UN ENTORNO TRIDIMENSIONAL REAL.
Procedimiento, programa de ordenador y archivo para generar imágenes que reproducen un entorno tridimensional real.
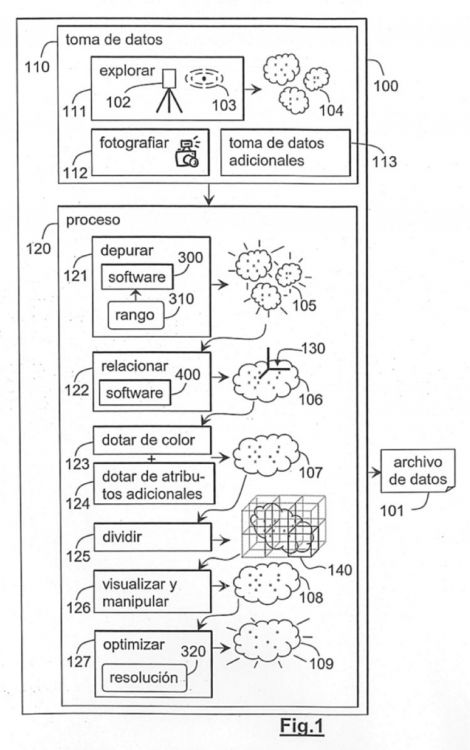
Procedimiento para la obtención a partir de un entorno tridimensional de la realidad, tal como un edificio arquitectónico, de un archivo de datos para generar imágenes que reproducen dicho entorno de forma bidimensional o tridimensional, particularmente aplicable para el registro de entornos arquitectónicos. En esencia el procedimiento comprende las operaciones de depurar las nubes de puntos obtenidas de la operación de explorar el entorno de la realidad; de relacionar entre sí las nubes de puntos depuradas y generar una nube de puntos final; de visualizar la nube de puntos final para eliminar, corregir y/o otorgar manualmente valores que representan propiedades físicas de los puntos, generando una nube de puntos final corregida; y de optimizar la nube de puntos final. También se da a conocer un programa de ordenador o un paquete de programas que automatiza las operaciones que caracterizan el procedimiento según la invención, generando un archivo de datos
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200702209.
Solicitante: ARCHIDAB URBAN MEDIA, S.L.
Nacionalidad solicitante: España.
Provincia: BARCELONA.
Inventor/es: MARAMBIO CASTILLO,ALEJANDRO E.
Fecha de Solicitud: 6 de Agosto de 2007.
Fecha de Publicación: .
Fecha de Concesión: 18 de Agosto de 2010.
Clasificación Internacional de Patentes:
- G01S17/89 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › para la cartografía o la formación de imágenes.
Clasificación PCT:
- G01S17/89 G01S 17/00 […] › para la cartografía o la formación de imágenes.
Fragmento de la descripción:
Procedimiento, programa de ordenador y archivo para generar imágenes que reproducen un entorno tridimensional real.
Sector técnico de la invención
La presente invención se refiere a un procedimiento y a un programa o paquete de programas de ordenador para la obtención a partir de un entorno tridimensional de la realidad, tal como un edificio arquitectónico, de un archivo de datos para generar imágenes que reproducen dicho entorno de forma bidimensional o tridimensional, particularmente aplicable para el registro de entornos arquitectónicos. También es objeto de la invención un archivo de datos obtenido mediante el procedimiento o el programa de ordenador anteriores.
Antecedentes de la invención
Actualmente, en el levantamiento arquitectónico de monumentos o edificios es común la generación de planos y otros documentos digitales que intentan reproducir el estado actual de dichas construcciones por ejemplo para su futura restauración o para el catastro del Patrimonio Arquitectónico. Como alternativa a levantamientos con topografía tradicional y con la intención de recopilar y almacenar la información de un modo más rápido y fiable, recientemente se está optando por utilizar la tecnología del escáner láser terrestre.
Los escáneres láser terrestres se utilizan como aparatos de topografía explorando el entorno a registrar. A partir de modelos de nube de puntos de alta densidad en 3D obtenidos en dichas exploraciones y mediante sistemas de referencia de los datos explorados en el espacio real, como por ejemplo mediante dianas de control, se generan planos en CAD 2D como orto-imágenes. Estos modelos complejos de nubes de puntos son transformados a modelos de mallas 3D texturizados para la generación de planos válidos, por ejemplo mediante su importación a aplicaciones CAD.
Son varias las investigaciones existentes sobre aplicaciones de láser escáner que se han centrado en la generación de polígonos a partir de las nubes de puntos para la extracción de vértices en la búsqueda de la generación de planos arquitectónicos ya sea de una manera automática o semi-automática (Allen, P., 2003. New Methods of Digital Modeling of Historic Sites. 3D Reconstruction and Visualization. IEEE Computer Society Nov/Dec 2003.) (Ballzani M, 2004. Laser Scanner 3D Survey in Archaeological Field: the Forum Of Pompeii. International Conference on Remote Sensing Archaeology. Beijing, CHINA.). Esto implica un proceso largo, complicado e impreciso en la escala que maneja el Patrimonio Arquitectónico. Su gran complejidad requiere la intervención de técnicos especializados en la interpretación de los datos que se toman en todo el proceso. Todavía es necesario dividir y estructurar la información para diferenciar entre elementos decorativos, elementos estructurales, singularidades, mobiliario, etc. que se presentan en un edificio arquitectónico.
La mayoría de las veces se llega a obtener mejores resultados a través de técnicas de fotogrametría que permite una detección de vértices más sencilla y en menor tiempo, no por la técnica en sí, sino porque la interpretación hecha por un especialista es más simple. Sin embargo, una desventaja significativa de esta técnica es la imposibilidad de hacer secciones. El levantamiento con láser escáner supera esta barrera al convertir la realidad en coordenadas espaciales. Lo que permite en un entorno digital visualizar cualquier vista o sección que se necesite, ya sea ortogonal o en perspectiva del modelo 3D.
Un proyecto de levantamiento arquitectónico con láser escáner puede ser una tarea muy costosa que se suele dividir en tres etapas. La primera etapa se utiliza para la toma de datos, la segunda etapa se usa en el proceso de los datos adquiridos y la última etapa se utiliza en la explotación del modelo de nube de puntos 3D. A continuación se comentan dichas etapas de un modo más extenso.
En la etapa de toma de datos, lo primero que se tiene que hacer es la elección de un escáner apropiado a la escala del proyecto. En el mercado existen una gran variedad de escáneres láser que permiten una amplia gama de escalas, desde los escáneres de tiempo de vuelo LIDAR aéreos (20 km50 m) y terrestres (300 m-2 m), hasta escáneres láser de fase, ideales para escalas pequeñas (4 m-1 cm). Estos instrumentos entregan los siguientes datos asociados a cada punto de la nube de puntos resultante de la toma de datos, referentes a: posición y rotación del instrumento; coordenadas espaciales (valor de X, Y, y Z); intensidad o valor de reflectancia de los materiales; color, preferentemente mediante un valor RGB, aquellos que incorporan cámaras digitales calibradas.
Una vez elegido el escáner láser se puede planificar su posición de acuerdo a su alcance, el orden en que se tienen que realizar el levantamiento y el tiempo que se toma en realizar cada barrido o exploración. Si es necesario la operación se repite de forma sucesiva ubicando el escáner en focos de lectura distintos o de forma simultánea con la utilización de más de un escáner ubicados en focos de lectura distintos, reduciéndose de este modo el tiempo de exploración.
A continuación, en la etapa de proceso, la información obtenida en cada exploración es sometida a una serie de operaciones destinadas a filtrar y unir la información en un único modelo. Inicialmente se elimina toda aquella información que no se desea, ya sea de forma manual o de forma automática. En ambos casos se requiere de personal capacitado que reconozca y valore la información que no pertenece al objeto de estudio. A continuación, se encuentra la posición y rotación del instrumento para cada exploración en un sistema de coordenadas específico. Esto se suele hacer a través de los puntos de control. Seguidamente se realiza la optimización del modelo creando un modelo homogéneo. A continuación se realiza la poligonalización del modelo, con lo que se obtienen las características geométricas que definen el modelo, y se le aplica un texturizado, normalmente a partir de datos fotográficos de la zona explorada, para su mejor comprensión.
Finalmente, se extrae la información 2D y 3D del modelo de nube de puntos. La etapa de explotación del modelo de nube de puntos 3D vendrá condicionada por las necesidades del trabajo. Así, puede que sea suficiente extraer geometrías elementales, o ninguna geometría, o podamos necesitar un modelo tridimensional completo.
Como ya se ha dicho anteriormente, las operaciones de filtraje requieren la eliminación manual de información. Para ello se utilizan potentes herramientas que permiten la visualización y manipulación de los datos explorados. Al avanzar la tecnología es cada vez más sencillo visualizar y gestionar un mayor número de puntos en tiempo real. Los visualizadores permiten explorar el modelo y generar las vistas necesarias para una mejor comprensión del objeto de estudio (Bonora L., Colombo L., Marana B., 2005. Laser Technology for cross-section survey in ancient buildings: a study for S.M. Maggiore in Bergamo. CIPA 2005 XX International Symposium. Torino, ITALY).
Uno de los principales inconvenientes de la metodología descrita es el incremento de tiempo sobre el terreno relacionado de manera significativa con el uso de puntos de control. Esto es debido por una parte a que algunos elementos pueden interponerse accidentalmente entre el escáner y el punto de control o porque estos últimos son objeto de hurto durante la exploración. Otro problema importante reside en el complejo proceso de triangulación de la nube de puntos que alarga el tiempo de proceso y genera una realidad aproximada en cada uno de las triangulaciones que suele estar distorsionada, hecho que no interesa en absoluto cuando lo que se quiere es tomar la realidad al máximo detalle.
Explicación de la invención
Con el objeto de superar todos los inconvenientes mostrados en el apartado anterior se da a conocer un procedimiento para la obtención a partir de un entorno tridimensional de la realidad, tal como un edificio arquitectónico, de un archivo de datos para generar imágenes que reproducen dicho entorno de forma bidimensional o tridimensional, particularmente aplicable para el registro de entornos arquitectónicos.
Dicho procedimiento es de los que comprende una etapa de toma de datos que comprende a su vez la operación u operaciones de explorar mediante al menos un dispositivo de escáner-3D una parte o la totalidad de los datos del entorno que se desea reproducir, desde al menos un foco de lectura, obteniéndose en cada operación respectivas nubes de puntos de alta densidad, en las que cada...
Reivindicaciones:
1. Procedimiento (100) para la obtención a partir de un entorno tridimensional de la realidad, tal como un edificio arquitectónico, de un archivo de datos (101) para generar imágenes que reproducen dicho entorno de forma bidimensional o tridimensional, particularmente aplicable para el registro de entornos arquitectónicos, comprendiendo dicho procedimiento una etapa de toma de datos (110) que comprende a su vez la operación u operaciones de explorar (111) mediante al menos un dispositivo de escáner-3D (102) una parte o la totalidad de los datos del entorno que se desea reproducir, desde al menos un foco (103) de lectura, obteniéndose en cada operación respectivas nubes de puntos (104) de alta densidad, en las que cada punto tiene asociado un conjunto de datos relativos al menos a su posición respecto del correspondiente foco de lectura del escáner, estando el procedimiento caracterizado porque comprende una etapa posterior de proceso (120) que comprende las operaciones de:
2. Procedimiento (100) según la reivindicación 1, caracterizado porque la etapa de toma de datos (110) incluye además una operación consistente en tomar fotografías (112) del entorno tridimensional real explorado.
3. Procedimiento (100) según una cualquiera de las reivindicaciones 1 y 2, caracterizado porque la operación de dotar de color (123) a los puntos de la nube de puntos final (106) de la etapa de proceso (120) asigna un valor de color de forma automática y lo añade al conjunto de datos de cada punto de la nube de puntos final, en función del color registrado para dichos puntos en la operación de toma de fotografías (112), preferentemente según el modelo de color RGB, generando la nube de puntos final matizada (107).
4. Procedimiento (100) según la reivindicación 2 o 3, caracterizado porque, en la etapa de toma de datos (110), la operación de tomar fotografías (112) se realiza de manera independiente de la operación de explorar datos (111) y porque dichas fotografías están referenciadas respecto un sistema de coordenadas conocido del entorno real.
5. Procedimiento (100) según una cualquiera de las reivindicaciones anteriores, caracterizado porque los rangos predeterminados (310) de la operación de depurar (121) están relacionados con las distancias (311) de los puntos a sus respectivos focos (103) de lectura; y/o con las separaciones (312) entre los puntos de una misma nube de puntos.
6. Procedimiento (100) según una cualquiera de las reivindicaciones anteriores, caracterizado porque el software (400) de la operación de relacionar (122) las nubes de puntos depuradas (105) realiza las rutinas de:
7. Procedimiento (100) según una cualquiera de las reivindicaciones anteriores, caracterizado porque la etapa de proceso (120) comprende una operación añadida consistente en georeferenciar (130) la nube de puntos final (106), la nube de puntos final matizada (107), la nube de puntos final corregida (108) o la nube de puntos final optimizada (109).
8. Procedimiento (100) según una cualquiera de las reivindicaciones anteriores, caracterizado porque la etapa de proceso (120) comprende una operación añadida que consiste en dividir (125) en porciones (140) más pequeñas la nube de puntos final (106) o la nube de puntos final matizada (107) comprendiendo cada porción una parte de los puntos de dicha nube de puntos con sus conjuntos de datos asociados, pudiéndose acceder a la información de cada porción independientemente del resto de porciones no consultadas.
9. Procedimiento (100) según la reivindicación 8, caracterizado porque en la operación de visualizar (126) la nube de puntos final (106) o la nube de puntos final matizada (107) de la etapa de proceso (120), se consulta y se visualiza por porciones (140), o por grupos de porciones, para una visualización más detallada de los puntos que forman parte de dichas porciones y de sus conjuntos de datos asociados, sin acceder a los datos asociados a los puntos del resto de las porciones no consultadas.
10. Procedimiento (100) según una cualquiera de las reivindicaciones anteriores, caracterizado porque en la etapa de toma de datos (110) se realiza además otra operación de toma de otros datos adicionales (113) mediante dispositivos de registro de propiedades físico-químicas, como por ejemplo aparatos de rayos X para el registro de la densidad y de la composición química de materiales.
11. Procedimiento según la reivindicación 10, caracterizado porque la etapa de proceso (120) comprende, con posterioridad a la operación de relacionar (122) entre sí las nubes de puntos depuradas (105), la operación de dotar de atributos adicionales (124) adaptada para asignar un valor adicional de forma automática y añadirlo al conjunto de datos de cada punto de la nube de puntos final (106), en función de los datos registrados en la operación de toma de datos adicionales (113).
12. Programa de ordenador o paquete de programas de ordenador (200) para la obtención de un archivo de datos (101) para generar imágenes que reproducen un entorno de la realidad de forma bidimensional o tridimensional, particularmente aplicable para el registro de entornos arquitectónicos, a partir de unos conjuntos de datos asociados a correspondientes puntos de nubes de puntos (104) de alta densidad obtenidas a través de la exploración del entorno de la realidad mediante al menos un dispositivo de escáner 3-D (102) ubicado en al menos un foco (103) de lectura, caracterizado porque comprende:
un módulo de depurado (201) de las nubes de puntos, que comprende a su vez las rutinas de:
un módulo de integración (202) de las nubes de puntos depuradas para generar una nube de puntos final (106) que las englobe a todas, estando el conjunto de datos asociado a cada punto referenciado según un mismo sistema de coordenadas escogido, que comprende a su vez las rutinas de:
opcionalmente, un módulo de aplicación de color (203) a los puntos de la nube de puntos final (106) destinado a:
un módulo de retoque manual (206), adaptado para:
un módulo de definición de resolución (207) del archivo de datos, que comprende a su vez las rutinas de:
13. Programa de ordenador o paquete de programas de ordenador según la reivindicación 12, caracterizado porque el módulo de aplicación de color (203) a los puntos de la nube de puntos final (106), asigna un valor de color de forma automática y lo añade al conjunto de datos de cada punto de la nube de puntos final, en función del color registrado para dichos puntos mediante una operación de toma de fotografías (112) durante la exploración del entorno de la realidad, preferentemente según el modelo de color RGB, generando la nube de puntos final matizada (107).
14. Programa de ordenador o paquete de programas de ordenador según una cualquiera de las reivindicaciones 12 a 13, caracterizado porque comprende además un módulo de referenciación (208) consistente en:
15. Programa de ordenador o paquete de programas de ordenador según una cualquiera de las reivindicaciones 12 a 14, caracterizado porque comprende además un módulo de parcelación (205) adaptado para dividir en porciones (140) más pequeñas la nube de puntos final (106) o la nube de puntos final matizada (107) comprendiendo cada porción una parte de los puntos de dicha nube de puntos con sus conjuntos de datos asociados, pudiéndose acceder a la información de cada porción independientemente del resto de porciones no consultadas.
16. Programa de ordenador o paquete de programas de ordenador según la reivindicación 15, caracterizado porque el módulo de retoque manual (206) permite consultar y visualizar por porciones (140), o por grupos de porciones, la nube de puntos final (106) o la nube de puntos final matizada (107) para una visualización más detallada de los puntos que forman parte de dichas porciones y de sus conjuntos de datos asociados, sin acceder a los datos asociados a los puntos del resto de las porciones no consultadas.
17. Programa de ordenador o paquete de programas de ordenador según una cualquiera de las reivindicaciones 12 a 16, caracterizado porque comprende además un módulo de aplicación de atributos adicionales (204), adaptado para asignar un valor adicional de forma automática y añadirlo al conjunto de datos de cada punto de la nube de puntos final (106), en función de unos datos registrados mediante dispositivos de registro adicionales (113) durante la exploración del entorno de la realidad.
18. Programa de ordenador o paquete de programas de ordenador según una cualquiera de las reivindicaciones 12 a 17, caracterizado porque comprende además un módulo de explotación 2D y 3D (209) del archivo de datos (101), que permite:
19. Programa de ordenador o paquete de programas de ordenador según la reivindicación 18, caracterizado porque el módulo de explotación 2D y 3D (209) muestra los conjuntos de datos de los puntos de la nube de puntos final optimizada (109) por grupos de al menos una porción (140), en la resolución previamente indicada, para una visualización más detallada de los puntos que forman parte de dichas porciones y de sus conjuntos de datos asociados, sin acceder a los datos asociados a los puntos del resto de las porciones.
20. Archivo de datos (101) obtenido mediante el procedimiento según una cualquiera de las reivindicaciones 1 a 11 o mediante el programa de ordenador según una cualquiera de las reivindicaciones 12 a 19.
Patentes similares o relacionadas:
ESCÁNER ÓPTICO A COLOR AEROTRANSPORTADO, del 4 de Junio de 2020, de AEROLASER SYSTEM S.L: ESCÁNER ÓPTICO A COLOR AEROTRANSPORTADO de sistema Flash-LADAR con láser , ópticas divisor de haz hacia un primer detector , espejo primario […]
Procedimiento y dispositivo para estabilizar localmente un punto de radiación en un objeto diana distante, del 6 de Mayo de 2020, de MBDA Deutschland GmbH: Un procedimiento para estabilizar localmente un punto de radiación (S) en un objeto diana distante (Z), donde el punto de radiación (S) se forma […]
Procedimiento y dispositivo para estabilizar localmente un punto de radiación en un objeto diana distante, del 15 de Abril de 2020, de MBDA Deutschland GmbH: Un procedimiento para estabilizar localmente un punto de radiación (S) en un objeto diana distante (Z), donde el punto de radiación (S) se forma a partir de un haz láser […]
Proceso y sistema para calcular el coste de materiales utilizables y consumibles para pintar vehículos de motor a partir del análisis de deformaciones en vehículos de motor, del 11 de Marzo de 2020, de Uesse S.R.L: Proceso para calcular el coste de materiales utilizables y consumibles para pintar vehículos de motor, a partir de un análisis de deformaciones en los vehículos […]
Métodos para realizar tareas en un tanque que contiene sustancias peligrosas, del 5 de Febrero de 2020, de Tankbots, Inc: Un método para realizar una tarea seleccionada en un tanque al menos parcialmente lleno de una sustancia energética ; caracterizado el método por: - dimensionar […]
Un sistema de cámara aérea, del 8 de Enero de 2020, de Spookfish Innovations Pty Ltd: Un sistema de cámara aérea que comprende: al menos una cámara dispuesta para capturar una pluralidad de imágenes sucesivas, incluyendo […]
Procedimiento de adquisición de imágenes de una escena, desde un sensor a bordo de un portador en desplazamiento, con servocontrol de su línea de visión, del 25 de Diciembre de 2019, de THALES: Procedimiento de adquisición de imágenes de una escena terrestre predeterminada, desde un portador en desplazamiento según una trayectoria […]
 Cámara, del 27 de Noviembre de 2019, de Nctech Ltd: Cámara panorámica que presenta un campo de visión global de 360° y configurada para capturar una imagen de 360° de una escena que se extiende alrededor […]
Cámara, del 27 de Noviembre de 2019, de Nctech Ltd: Cámara panorámica que presenta un campo de visión global de 360° y configurada para capturar una imagen de 360° de una escena que se extiende alrededor […]