Procedimiento para procesar un conjunto de señales de un sistema global de satélites de navegación con al menos tres portadores.
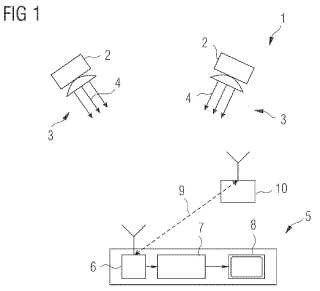
Un procedimiento para procesar un conjunto de señales (3) de navegación de un sistema global (1) de satélitesde navegación con al menos tres señales portadoras (4) en el que el procesamiento de las señales (3) denavegación se basa en una combinación lineal de mediciones de fase de las señales portadoras (4) en una señal defase combinada y en la que las ambigüedades de fase son resueltas,
caracterizado porque
una ambigüedad de fase de la señal de fase combinada es un entero múltiplo de una longitud de onda combinadaasociada con la señal de fase combinada y porque la señal de fase combinada está desprovista de geometría ydesprovista de variables de perturbaciones independientes de la frecuencia,
en el que se combinan N mediciones
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07112009.
Solicitante: DLR DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V..
Inventor/es: HENKEL,PATRICK.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S19/44 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › Resolución de la ambigüedad de la fase de la portadora; Ambigüedad flotante; método LAMBDA [Least-squares AMBiguity Decorrelation Adjustment].
PDF original: ES-2394943_T3.pdf
Fragmento de la descripción:
Procedimiento para procesar un conjunto de señales de un sistema global de satélites de navegación con al menos tres portadores.
La presente invención versa acerca de un procedimiento para procesar un conjunto de señales de navegación de un sistema global de satélites de navegación con al menos tres señales portadoras en el que el procesamiento de las señales de navegación se basa en una combinación lineal de mediciones de fase de las señales portadoras en una señal de fase combinada.
Tal procedimiento se conoce por ZHANG, H.: Triple frequency Cascading Ambiguity Resolution for Modernized GPS and Galileo, en UCGE Reports, N° 20228, 2005. Según el procedimiento conocido, para Galileo se proponen tres combinaciones lineales de frecuencias. Sin embargo, un límite estricto sobre los coeficientes de ponderación evitaba la generación de nuevas combinaciones de banda ancha por encima de 0, 90 m.
En la actualidad se usan o están propuestos tres sistemas globales de navegación por satélite: el sistema de posicionamiento global (GPS) , Glonass y el sistema Galileo propuesto. Los sistemas globales de satélites de navegación se basan en satélites de navegación que emiten señales portadoras en al intervalo más elevado de frecuencias. Sobre las señales portadoras se modulan una secuencia periódica de códigos y un mensaje de navegación. Con base en la secuencia de códigos y en el mensaje de navegación puede llevarse a cabo un procedimiento de posicionamiento de un dispositivo de navegación. La precisión del posicionamiento puede mejorar considerablemente si se usa la señal portadora de alta frecuencia para el proceso de posicionamiento además de la señal de códigos. Por ejemplo, dentro del GPS, la longitud de onda de la señal portadora L1 llega a ser de 19, 0 cm, en comparación con los 300 m de un segmento de código. En consecuencia, cabe esperar una mejora en la precisión en un factor de 1500.
Una desventaja de un procedimiento de posicionamiento que use las señales portadoras es la ambigüedad de la fase, dado que la señal portadora no contiene información alguna sobre el número entero de longitudes de onda entre el dispositivo de navegación y el satélite. Por lo tanto, la puesta en fase es desconocida.
Además, hay que tener en cuenta que la señal portadora atraviesa la atmósfera terrestre, en especial la ionosfera. En consecuencia, las señales portadoras presentan lo que se denomina error ionosférico. Fuentes adicionales de error son el ruido de fase de la señal portadora, el error orbital del satélite, así como el error de reloj del dispositivo de navegación y del satélite.
Los errores de reloj pueden eliminarse por medio del procedimiento de la doble diferencia, en el que se determina la posición del dispositivo de navegación con respecto a una estación de referencia considerando las diferencias entre las señales de diferencias actuales procedentes de satélites diferentes, estando formadas las señales de diferencias por las diferencias entre las señales emitidas por un satélite específico pero recibidas desde el dispositivo de navegación y la estación de referencia. Además, los errores ionosférico y troposférico están significativamente atenuados para líneas base cortas si se usa el procedimiento de la doble diferencia.
En general, la ambigüedad de fase se resuelve estimando la puesta en fase. La fiabilidad de la estimación depende, entre otras cosas, de la relación entre la longitud de onda de la señal portadora y las desviaciones resultantes de las otras fuentes de error. Normalmente, el error ionosférico da como resultado un error espacial de algunos metros, mientras que el ruido de fase afecta los resultados de la estimación en algunos milímetros.
Las mediciones de la fase de la portadora son mediciones sumamente precisas, pero ambiguas. Se han sugerido numerosos enfoques para la resolución de la ambigüedad de enteros.
TEUNISSEN, P.: Least-squares estimation of the integer ambiguities, Invited lecture, Section I to IV, Theor y and Methodology, lAG General Meeting, Pekín, China, 1993, da a conocer un procedimiento de estimación de mínimos cuadrados para resolver las ambigüedades de fase. Este enfoque también se denomina procedimiento LAMBDA (por las siglas en inglés de "ajuste de descorrelación de la ambigüedad por mínimos cuadrados") .
DE JONGE, D. y TIBERIUS, C.: The LAMBDA method for integer ambiguity estimation: implementation aspects, en: LGR series, Delft University of Technology, pp.1-49, 1996, dan a conocer detalles adicionales sobre la implementación de un procedimiento de estimación de mínimos cuadrados para resolver ambigüedades de fase.
También se pueden encontrar detalles sobre procedimientos para resolver la ambigüedad de fase en HENKEL, P. Y GÜNTHER, C.: Integrity Analysis of Cascade Integer Resolution with Decorrelation Transformations, en Proceedings of the Institute of Navigation, National Technical Meeting, San Diego, 2007, y en el documento US 2005/101248 A1.
La fiabilidad de la estimación de enteros es validada por la tasa de éxito dada a conocer en TEUNISSEN, P.: Success probability of integer GPS ambiguity rounding and bootstrapping, en Journal of Geodesy, Vol. 72, pp. 606612, 1998, o por medio de una comparación entre las normas de error de los candidatos enteros mejor y segundo mejor, tal como se da a conocer en VERHAGEN, S.: On the Reliability of Integer Ambiguity Resolution, en Journal of the Institute of Navigation, Vol. 52, No. 2, pp. 99-110, 2005.
Combinando señales portadoras, puede generarse una señal combinada que comprende una longitud de onda significativamente mayor que las de las señales portadoras individuales. Por ejemplo, la diferencia entre las señales portadoras L1 y L2 da como resultado una señal combinada con una longitud de onda de 10, 7 cm, a la que se denomina banda estrecha (NL) .
En COCARD, M. y GEIGER, A.: Systematic search for all possible widelanes, Proc. of 6th Intern. Geodetic Symposium on Satellite Positioning, 1992, se da a conocer una búsqueda sistemática de todas las posibles combinaciones de banda ancha de L1 y L2. La combinación de banda ancha y las combinaciones de banda estrecha se caracterizan por la amplificación del ruido, la amplificación del error ionosférico y la amplificación del error de trayectorias múltiples.
En COLLlNS, P.: An overview of GPS inter-frequency carrier phase combinations, UNB/GSD, 1999, se da a conocer un procedimiento para una búsqueda sistemática de combinaciones de fase de portadoras entre frecuencias de GPS. Se calculan las características ionosférica, de ruido y de trayectorias múltiples para las combinaciones L1-L2 tanto de banda ancha como de banda estrecha.
VOLLATH, U. et al: Three or Four Frequencies-How many are enough?, en Proc. of the Institute of Navigation (ION) , Portland, USA, 2000, describen la fiabilidad de la resolución de la ambigüedad para sistemas de navegación con cuatro portadoras.
Para resolver la ambigüedad de fase se usa un enfoque iterativo. Al principio se estima la fase usando una señal combinada con la mayor longitud de onda. En las etapas subsiguientes de iteración se consideran señales combinadas adicionales con una longitud de onda decreciente por etapas. En cada etapa de iteración se estima la puesta en fase, pudiendo usarse en etapas de iteración posteriores la información sobre la puesta en fase obtenida en etapas previas de iteración. Este enfoque suele denominarse CIR (resolución en cascada de la ambigüedad de enteros) . La resolución en cascada de la ambigüedad de enteros se basa en diferentes combinaciones de banda ancha. La estimación de enteros se simplifica con una mayor longitud de onda, lo que es de especial interés en la cinemática de área ancha en tiempo real (WARTK) debido a condiciones ionosféricas diferentes en el usuario y en la ubicación de referencia.
En JUNG, J.: High Integrity Carrier Phase Navigation Using Multiple Civil GPS Signals, tesis doctoral, University of Stanford, 2000, se analizan por estimación de gradiente ionosférico tres combinaciones lineales de frecuencias para GPS y CIR extendida.
La desventaja de la resolución en cascada de la ambigüedad de enteros de la técnica anterior es la estimación repetitiva de la línea base, que es un parámetro molesto en todas las etapas salvo la última. Esto motiva el uso de combinaciones sin geometría de banda ancha.
Las combinaciones sin geometría más simples se obtienen restando mediciones de fase de dos frecuencias diferentes. La combinación E5a-E5b se beneficia de una reducción significativa del error ionosférico, pero muestra un grave inconveniente: la superposición de ambigüedades ya no puede ser expresada... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento para procesar un conjunto de señales (3) de navegación de un sistema global (1) de satélites de navegación con al menos tres señales portadoras (4) en el que el procesamiento de las señales (3) de navegación se basa en una combinación lineal de mediciones de fase de las señales portadoras (4) en una señal de fase combinada y en la que las ambigüedades de fase son resueltas,
caracterizado porque una ambigüedad de fase de la señal de fase combinada es un entero múltiplo de una longitud de onda combinada asociada con la señal de fase combinada y porque la señal de fase combinada está desprovista de geometría y desprovista de variables de perturbaciones independientes de la frecuencia,
en el que se combinan N mediciones <p¡ de fase de las señales portadoras con longitud de onda A¡ para formar una combinación sin geometría usando los coeficientes a¡ de ponderación según:
siendo n¡ números enteros.
2. El procedimiento según la Reivindicación 1 caracterizado porque el error troposférico, los errores de reloj de un dispositivo de navegación y de los satélites (2) , así como el error
orbital de los satélites, se eliminan por medio de la combinación lineal.
3. El procedimiento según las Reivindicaciones 1 ó 2
caracterizado porque una matriz de combinación que contiene los coeficientes de ponderación de las combinaciones lineales de las señales de portadora tiene un rango correspondiente al número de señales de fase combinada.
4. El procedimiento según la Reivindicación 3
caracterizado porque se usan N-1 combinaciones lineales sin geometría de N mediciones de fase de las señales portadoras (4) junto con al menos una medición de diferencia que contiene la diferencia de fase entre una medición de fase conservadora de la geometría y una medición de código.
5. El procedimiento según la Reivindicación 4 caracterizado porque la ambigüedad de fase y el error ionosférico se estiman minimizando una norma con respecto a una matriz de covarianza inversa de las mediciones.
6. El procedimiento según la Reivindicación 5
caracterizado porque las ambigüedades de fase estimadas de las mediciones de fase combinada son descorrelacionadas buscando una transformación de descorrelación que minimice los elementos fuera de la diagonal de una matriz de covarianza de las ambigüedades de fase estimadas y conserve la integridad durante la retrotransformación.
7. El procedimiento según la Reivindicación 6 55 caracterizado porque las ambigüedades de fase descorrelacionadas se redondean a números enteros y se retrotransforman por medio de la matriz inversa de la transformación de descorrelación.
8. El procedimiento según las Reivindicaciones 6 ó 7 caracterizado porque
para la combinación lineal de las mediciones de fase se usa una matriz de combinación que minimiza la varianza máxima de las ambigüedades de fase estimadas descorrelacionadas.
9. El procedimiento según una cualquiera de las Reivindicaciones 6 a 8
caracterizado porque para la combinación lineal de las mediciones de fase se usa una matriz de combinación que minimiza la probabilidad
de no detección de una estimación errónea tras retrotransformar las ambigüedades de fase enteras descorrelacionadas.
10. El procedimiento según una cualquiera de las Reivindicaciones 6 a 9
caracterizado porque la ambigüedad de fase es fija si la varianza de las ambigüedades de fase descorrelacionadas está por debajo de un valor umbral predeterminado y porque se usan mediciones de fase adicionales para estimar las restantes ambigüedades de fase.
11. El procedimiento según una cualquiera de las Reivindicaciones 5 a 10
caracterizado porque se comprueba la influencia de despreciar un error ionosférico de segundo orden en la estimación del error ionosférico de primer orden y porque se estima el error ionosférico de segundo orden si el desprecio del error ionosférico de segundo orden da como resultado un error de estimación del error ionosférico de primer orden que sobrepase el error de la estimación del error ionosférico de primer orden si se tienen en cuenta ambos errores ionosféricos.
12. El procedimiento según una cualquiera de las Reivindicaciones 4 a 11
caracterizado porque se combinan las N mediciones <Pi de fase de las señales portadoras con longitud de onda Ai para formar una combinación plenamente geométrica usando los coeficientes Oi de ponderación según:
siendo ni números enteros y T ~ 1.
13. El procedimiento según una cualquiera de las Reivindicaciones 1 a 11 caracterizado porque
N =3 Ylas señales portadoras son las bandas L1, E5b YE5a del sistema Galileo.
14. El procedimiento según la Reivindicación 13 caracterizado porque los números enteros ni para las combinaciones sin geometría se seleccionan de las ternas (1, -13, 12) , (9, -2, -10) Y (10, -15, 2) .
15. El procedimiento según una cualquiera de las Reivindicaciones 1 a 11 caracterizado porque N = 4 Ylas señales portadoras son las bandas L1, E5b, E5a y E6 del sistema Galileo.
16. El procedimiento según la Reivindicación 15
caracterizado porque los números enteros ni para las combinaciones sin geometria se seleccionan de las cuaternas (1, -3, 5, -3) , (1, 7, -2, -6) , (2, 4, 3, -9) (0, 10, -7, -3) , (3, 1, 8, -12) , (1, -13, 12, O) (3, -4, -1, 1) , (2, -1, -6, 4) , (4, 3, -3, -5) (4, -7, 4, -2) , (3, 6, -8, -2) , (5, O, 2, -8) (7, -1, -4, -4) , (5, -5, -7, 5) , (6, 2, -9, -1) (0, 3, -10, 7) , (-1, 12, -27, 16) , (-1, 9, -17, 9) (-1, 6, -7, 2) , (-1, 3, 3, -5) .
17. El procedimiento según las Reivindicaciones 4, 12 Y 15
caracterizado porque los números enteros ni para las combinaciones plenamente geométricas se seleccionan de las cuaternas (0, 1, -3, 2) , (1, -4, 1, 2) , (O, 0, 1, -1) (0, 1, -2, 1) , (1, -4, 2, 1) , (1, -3, -1, 3) (0, 1, -1, O) , (-3, 1, O, 3) , (1, -3, O, 2) (0, 1, O, -1) , (O, 2, -3, 1) , (1, -3, 1, 1) (O, 1, 1, -2) , (-3, 1, 2, 1) , (1, -3, 2, O) (1, -2, -1, 2) , (O, 2, -1, -1) , (1, -3, 3, -1) (1, -2, 0, 1) , (1, -1, -3, 3) , (-3, 2, 1, 1) (1, -2, 1, O) , (1, -1, -2, 2) , (0, 3, -2, -1) (1, -2, 2, -1) , (1, -1, -1, 1) , (O, 3, -1, -2) (1, -2, 3, -2) , (1, -1, O, O) .
18. El procedimiento según una cualquiera de las Reivindicaciones 1 a 11 caracterizado porque N =3 Y las señales portadoras son las bandas L 1, L2 Y L5 del sistema Galileo.
19. El procedimiento según la Reivindicación 18 caracterizado porque los números enteros ni para las combinaciones sin geometría se seleccionan de las ternas (5, -39, 40) , (5, -16, 10) , (O, 23, -24) , (5, 7, -14) , (10, -9, -4) , (15, -25, 6) (15, -2, -18) .
20. Un dispositivo de navegación para un sistema global de satélites de navegación caracterizado porque el dispositivo está dispuesto para llevar a cabo un procedimiento según una cualquiera de las reivindicaciones 1 a
19.
FIG 1 1
(
----3
FIG 2
Relación de potencia portadora-ruido G/No [dB-Hz]
FIG 3
iD
32.
~
'1:
~
o 1:
.2
Cl>
o "C
'2
Cl>
"C
-a..
E
«
-*-A: AN -+-A:AI -+t-B: AN -+-B:AI
.....M····C:AN "'+"C:AI
Longitud de onda de combinaciones sin geometría [mI
FIG 4
~"
«
o "O
"2
Q) "O
c:
-o
' (3
r3
!E
o..
E
«
O
I 1++
O
r, ~~i :2···1-;'1I
.;: : + ! ~I
'l' . -. .L. + ' f----, . ·"1---, ._
;t: + .
I + --l:t-----±-----I ---
I'\
A=3 A=31
+ _1-...
O
<> 3F (L1.ESb.ESa) , + 4F (L1.ESb.E5a.E6)
Amplificación del error ionosférico ArA
FIG 5
8
12
Ruido de código CJ [m]p Número de épocas N.
p
° °
FIG 6
0, 01 0, 008 0, 006 0, 004 0, 002
2, 5
°
Ruido de fase CJ~ [mm] Ruido de código CJ [m]
p
FIG 7
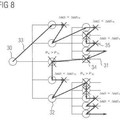
FIG 8
FIG 9
10. 1
10. 4
10. 3 10-2
10. 4
Retardo ionosférico de segundo orden 12 [m]
FIG 10
( Inicio J
+
-..; 11
Adquisición yseguimiento de la señal
+
Muestreo de mediciones de fase de la portadora !-12
ro
~
Combinación líneal -", -13
+
Resolver ambigüedades combinadas yretardos ~14
ionosféricos ., ..
~
Buscar ambigüedades de enteros -1-15
~
...1-16
Retrotransformación con detección implícita de fallos
Fallo detectado I Ningún fallo detectado
Estimación de los retardos ionosféricos f-17
., .. 1--18
Determinación de la posición
- ---~
~
( Fin
Patentes similares o relacionadas:
Procedimiento y sistema de navegación en tiempo real con la ayuda de señales radioeléctricas de tres portadoras emitidas por satélites y de correcciones ionosféricas, del 8 de Febrero de 2017, de ORGANISATION INTERGOUVERNEMENTALE DITE AGENCE SPATIALE EUROPEENNE: Procedimiento de navegación en tiempo real con la ayuda de señales radioeléctricas de tres portadoras de primera, segunda y tercera frecuencias distintas, de valores […]
Método, aparato y sistema para la determinación de la ubicación de un objeto, que tiene un receptor de Sistema global de navegación por satélite mediante el procesamiento de datos no diferenciados como mediciones de la fase de la portadora y productos externos tales como datos de la ionosfera, del 11 de Mayo de 2016, de European Space Agency (ESA): Método para la determinación de una ubicación de un objeto, que tiene un receptor de Sistema global de navegación por satélite (GNSS), comprendiendo el método […]
 Dispositivo de seguimiento de señales de radionavegación, del 11 de Noviembre de 2015, de CENTRE NATIONAL D'ETUDES SPATIALES: Dispositivo de seguimiento de unas señales de radionavegación (10, 110, 110'), que comprende una primera etapa de seguimiento de una primera señal de radionavegación […]
Dispositivo de seguimiento de señales de radionavegación, del 11 de Noviembre de 2015, de CENTRE NATIONAL D'ETUDES SPATIALES: Dispositivo de seguimiento de unas señales de radionavegación (10, 110, 110'), que comprende una primera etapa de seguimiento de una primera señal de radionavegación […]
 Resolución parcial de la ambigüedad para la estimación del retardo ionosférico multifrecuencia, del 25 de Octubre de 2013, de DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.: Un procedimiento para determinar componentes de fase de señales portadoras emitidas por satélites deun sistema de navegación por satélite, que comprende […]
Resolución parcial de la ambigüedad para la estimación del retardo ionosférico multifrecuencia, del 25 de Octubre de 2013, de DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.: Un procedimiento para determinar componentes de fase de señales portadoras emitidas por satélites deun sistema de navegación por satélite, que comprende […]
 Procedimiento de geoposicionamiento que utiliza datos de asistencia, del 15 de Octubre de 2013, de CENTRE NATIONAL D'ETUDES SPATIALES: Procedimiento de determinación de datos de asistencia que facilita el tratamiento de señales de radionavegaciónque proceden de un conjunto de satélites de radionavegación […]
Procedimiento de geoposicionamiento que utiliza datos de asistencia, del 15 de Octubre de 2013, de CENTRE NATIONAL D'ETUDES SPATIALES: Procedimiento de determinación de datos de asistencia que facilita el tratamiento de señales de radionavegaciónque proceden de un conjunto de satélites de radionavegación […]
Tratamiento de señales de radionavegación utilizando una combinación widelane, del 24 de Abril de 2013, de CENTRE NATIONAL D'ETUDES SPATIALES: Procedimiento de tratamiento de señales de radionavegación procedentes de un conjunto de satélites, del quecada satélite difunde por lo menos una primera […]