PROCEDIMIENTO Y MEDIO PARA LA DETERMINACIÓN ENZIMÁTICA DE ACETATO.
Equipo de sujeción, para montar una herramienta (104) en una máquina (102) a lo largo de un eje de rotación (106) de la máquina (102),
mediante el uso de una ºº pluralidad de tetones de arrastre (120) que se extienden axialmente desde la máquina (102) y que presenta tres superficies de contacto del mismo que interseccionan (122, 124, 124) que se acoplan simultáneamente en contacto sustancialmente íntimo con tres superficies de contacto que interseccionan correspondientes (130, 132, 132) de una pluralidad de receptáculos de tetón (128) que se extienden axialmente desde la ººº herramienta (104)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2006/012299.
Solicitante: MERCK PATENT GMBH.
Nacionalidad solicitante: Alemania.
Dirección: FRANKFURTER STRASSE 250 64293 DARMSTADT ALEMANIA.
Inventor/es: VORMBROCK, ROLF, DR.
Fecha de Publicación: .
Fecha Solicitud PCT: 20 de Diciembre de 2006.
Fecha Concesión Europea: 28 de Julio de 2010.
Clasificación Internacional de Patentes:
- C12Q1/48 QUIMICA; METALURGIA. › C12 BIOQUIMICA; CERVEZA; BEBIDAS ALCOHOLICAS; VINO; VINAGRE; MICROBIOLOGIA; ENZIMOLOGIA; TECNICAS DE MUTACION O DE GENETICA. › C12Q PROCESOS DE MEDIDA, INVESTIGACION O ANALISIS EN LOS QUE INTERVIENEN ENZIMAS, ÁCIDOS NUCLEICOS O MICROORGANISMOS (ensayos inmunológicos G01N 33/53 ); COMPOSICIONES O PAPELES REACTIVOS PARA ESTE FIN; PROCESOS PARA PREPARAR ESTAS COMPOSICIONES; PROCESOS DE CONTROL SENSIBLES A LAS CONDICIONES DEL MEDIO EN LOS PROCESOS MICROBIOLOGICOS O ENZIMOLOGICOS. › C12Q 1/00 Procesos de medida, investigación o análisis en los que intervienen enzimas, ácidos nucleicos o microorganismos (aparatos de medida, investigación o análisis con medios de medida o detección de las condiciones del medio, p. ej. contadores de colonias, C12M 1/34 ); Composiciones para este fin; Procesos para preparar estas composiciones. › en los que interviene una transferasa.
- G01N33/52B2
Clasificación PCT:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
CAMPO DE LA INVENCIÓN
La presente invención se refiere a la fabricación de unos componentes a partir de unos
ºº materiales compuestos, y más particularmente a un procedimiento y a un dispositivo para fijar unas herramientas, tales como unos mandriles rotativos, a unas máquinas, tales como unas máquinas de colocación de fibra automatizadas, durante la fabricación de unos componentes a partir de unos materiales compuestos, tales como las que se conocen por ejemplo a partir del documento DE3735718A.
ANTECEDENTES DE LA INVENCIÓN
En la fabricación de unas piezas de material compuesto se disponen normalmente sobre la superficie de una herramienta, tal como un mandril rotativo, unas cintas y/o estopas de fibra impregnadas con resina. Normalmente las estopas de fibra se tienden en bandas de
ººº múltiples estopas paralelas, aplicadas con un ángulo predeterminado a lo ancho de la herramienta. Normalmente, una pluralidad de capas de bandas, conocidas comúnmente como hebras, se aplican sucesivamente, superpuestas, para llevar la pieza a un estado de acabado, aunque no endurecido. Una vez que todas las hebras se han dispuesto sobre la herramienta, la herramienta con la
ººº pieza no endurecida, que aún descansa sobre la misma, se dispone en un autoclave, u otro tipo de equipo de endurecer, y se realizan unas operaciones adicionales destinadas a endurecer la pieza de material compuesto en la herramienta y, a continuación, retirar de la herramienta la pieza de material compuesto endurecida. Para que la producción de dichas piezas de material compuesto se realice de una forma
ººº eficiente y eficaz, se pretende disponer de una pluralidad de herramientas que se puedan fijar, de modo que se puedan intercambiar, a la máquina que se emplea para disponer el material compuesto sobre la herramienta. De este modo, mientras una pieza de material compuesto se está endureciendo en una de las herramientas intercambiables, la máquina utilizada para disponer el material compuesto sobre la herramienta, puede emplearse
ººº simultáneamente para enrollar las hebras de fibra sobre otra herramienta. Mediante el uso de dichas herramientas intercambiables, la máquina que dispone las hebras de fibra sobre las herramientas puede funcionar más o menos continuamente, para enrollar unas piezas sucesivas, mientras que las piezas enrolladas previamente avanzan a través del ciclo de
endurecimiento y cualquier otra operación subsiguiente requerida para separar de sus respectivas herramientas las piezas enrolladas y endurecidas previamente. Puesto que las máquinas empleadas para disponer las hebras de fibra sobre la herramienta son frecuentemente muy complejas, controladas por ordenador y de un modo general muy
ºº caras, es altamente deseable la posibilidad de disponer de unas herramientas intercambiables, de modo que la máquina pueda funcionar prácticamente de una forma continua. En las nuevas generaciones de aviones, sin embargo, las piezas muy grandes, tales como unas secciones de fuselaje completas y los revestimientos de las alas, por ejemplo, se
ººº fabricarán a partir de unos materiales compuestos a través del proceso de la colocación de fibra automatizada en grandes mandriles rotativos, u otras herramientas, mediante unas máquinas de colocación de fibra automatizadas altamente sofisticadas. Dichas piezas deben fabricarse con todas las hebras de fibra colocadas con un grado de precisión muy alto. Dado el gran tamaño de dichas piezas, los diseñadores se han encontrado con
ººº una dificultad considerable al desarrollar unos conectores desmontables para emplearse en la interfaz entre la herramienta y la máquina de colocación de fibra automatizada que sean capaces de cumplir el alto nivel de precisión en la fijación de los componentes entre sí, a la vez que permitan simultáneamente una intercambiabilidad adecuada y práctica de las herramientas.
ººº Es altamente deseable, por consiguiente, proporcionar un equipo y un procedimiento mejorado para unir una herramienta de colocación de fibra a una máquina de colocación de fibra, de un modo que proporcione los grados de precisión requeridos en la ubicación de la herramienta, a la vez que proporcione una intercambiabilidad adecuada de una pluralidad de herramientas en una única máquina de colocación de fibra, y/o el uso de
ººº una pluralidad de herramientas en una pluralidad de máquinas de colocación de fibra.
SUMARIO BREVE DE LA INVENCIÓN
Se proporcionan un equipo y un procedimiento mejorados, para fijar una herramienta de colocación de fibra a una máquina de colocación de fibra a lo largo de un eje de rotación
ººº de la máquina de colocación de fibra, mediante el uso de una pluralidad de tetones de arrastre que se extienden axialmente desde la máquina, y que comprenden tres superficies de contacto de intersección de los mismos que se acoplan simultáneamente en contacto sustancialmente íntimo con tres superficies de contacto de intersección correspondientes de una pluralidad de receptáculos de los tetones de arrastre que se extienden axialmente desde la herramienta. Unos soportes de sujeción maestros pueden emplearse para ajustar entre sí los tetones de arrastre con sus receptáculos correspondientes de los tetones de arrastre, para alcanzar un grado pretendido de ajuste íntimo entre las superficies de
ºº contacto correspondientes de los tetones de arrastre y los receptáculos de los tetones de arrastre. Un par de dientes móviles puede disponerse funcionalmente en lados opuestos de cada uno de los tetones de arrastre para el desplazamiento selectivo hacia el exterior desde el eje de rotación a lo largo de los lados de cada tetón de arrastre a una posición enclavada
ººº de los dientes, y hacia el interior desde el eje de rotación a lo largo de los lados de los tetones de arrastre a una posición desenclavada de los dientes. El extremo de cada diente puede presentar una superficie de contacto del mismo angulada encarada sustancialmente axialmente hacia el interior que se acopla con un par de receptáculos de diente fijados firmemente a la herramienta en lados opuestos de cada receptáculo de tetón de arrastre,
ººº para recibir en su interior uno de los dientes en cada receptáculo de diente, cuando los dientes están dispuestos en la posición enclavada. Cada uno de los receptáculos de diente puede presentar una superficie de contacto angulada que se opone a las superficies de contacto anguladas de los dientes, de modo que cuando los dientes se desplazan hacia el exterior, las superficies de contacto complementarias de los dientes y los receptáculos de
ººº los dientes encajan entre sí por deslizamiento y tiran de las tres superficies de contacto de los tetones de arrastre en un contacto íntimo sustancialmente simultáneo con las tres superficies de contacto de los receptáculos de los tetones de arrastre. Una forma de equipo de sujeción, según la presente invención, para unir una herramienta de colocación de la fibra a una máquina de colocación de la fibra a lo largo de un eje de
ººº rotación de la máquina de colocación de la fibra, comprende un conector macho y un conector hembra adaptados para el acoplamiento desmontable entre sí a lo largo del eje de rotación. El conector macho puede comprender una base del mismo adaptada para la fijación, de modo que pueda girar, a la máquina de colocación de la fibra, para la rotación de la base alrededor del eje de rotación, y que comprenda una pluralidad de tetones de
ººº arrastre macho distanciados entre sí circunferencialmente, que se extiendan axialmente desde la base del conector macho. Cada tetón de arrastre del conector macho puede terminar en una superficie sustancialmente plana, enfrentada axialmente, en el extremo distal del tetón de arrastre.
Cada tetón de arrastre puede presentar asimismo unas paredes laterales del tetón de arrastre, de ángulo opuesto, que convergen hacia el exterior, que se truncan mediante la pared extrema plana en el extremo distal del tetón de arrastre. Las paredes laterales del tetón de arrastre pueden converger de tal modo que, si se extendieran más allá del
ºº extremo distal del tetón de arrastre, interseccionarían a lo largo de una línea dirigida sustancialmente radialmente, ortogonalmente a través del eje de rotación. El conector hembra puede comprender una base del mismo, adaptada para la sujeción rotativa a la herramienta, para la rotación alrededor del eje de rotación. El conector hembra puede comprender asimismo una pluralidad de receptáculos de los tetones,
ººº abiertos axialmente, sujetos a la base del conector hembra en...
Reivindicaciones:
:
1. Equipo de sujeción, para montar una herramienta (104) en una máquina (102) a lo largo de un eje de rotación (106) de la máquina (102), mediante el uso de una
ºº pluralidad de tetones de arrastre (120) que se extienden axialmente desde la máquina
(102) y que presenta tres superficies de contacto del mismo que interseccionan (122, 124, 124) que se acoplan simultáneamente en contacto sustancialmente íntimo con tres superficies de contacto que interseccionan correspondientes (130, 132, 132) de una pluralidad de receptáculos de tetón (128) que se extienden axialmente desde la
ººº herramienta (104).
2. Dispositivo según la reivindicación 1, en el que las posiciones relativas de los tetones de arrastre (120) y los receptáculos de tetón (128) se ajustan con unas herramientas maestras.
3. Dispositivo según la reivindicación 1, que comprende además unos dientes (134)
ººº dispuestos adyacentes a los tetones de arrastre (120), que se extienden hacia el exterior partiendo del eje de rotación (106) y que presentan unas caras anguladas sustancialmente axiales (136) desplazables hacia el exterior para acoplarse encajando en las caras anguladas en oposición sustancialmente axiales (140) de los receptáculos de diente correspondientes (138).
ººº 4. Equipo de sujeción según la reivindicación 1, en el que la herramienta (104) es una herramienta de colocación de la fibra y la máquina (102) es una máquina de colocación de la fibra, comprendiendo el dispositivo: un conector macho (112) y un conector hembra (114), adaptados para el acoplamiento desmontable selectivo entre sí a lo largo del eje de rotación (106);
ººº comprendiendo el conector macho (112) una base (116) del mismo adaptada para la fijación, de modo que pueda girar, a la máquina de colocación de la fibra (102) para el giro de la base (116) alrededor del eje de rotación (106), y en el que la pluralidad de tetones de arrastre (120) comprende una pluralidad de tetones de arrastre macho espaciados circunferencialmente que se extienden axialmente desde la base del
ººº conector macho (116); comprendiendo el conector hembra (114) una base (126) del mismo adaptada para la fijación, de modo que pueda girar, a la herramienta (104) para el giro alrededor del eje de rotación (106), y en el que la pluralidad de receptáculos de tetón (128)
comprende una pluralidad de receptáculos de tetón que se abren axialmente fijados a la base del conector hembra (126) con un patrón espaciado sustancialmente circunferencialmente, para recibir los tetones de arrastre (120) en unos receptáculos
(128) correspondientes, cuando los conectores macho y hembra (112, 114) se
ºº encuentran encajados entre sí; comprendiendo adicionalmente el dispositivo de accionamiento una agrupación ordenada de dientes (134) para la unión selectiva funcionalmente de los conectores macho y hembra (112, 114)
5. Dispositivo según la reivindicación 4, en el que:
ººº la agrupación ordenada de dientes comprende una pluralidad de dientes (134) conectados funcionalmente a uno de las bases del conector (116, 126), y una pluralidad de receptáculos de diente (138) conectados funcionalmente a la otra de las bases del conector (126, 116); montándose funcionalmente los dientes (134) o los receptáculos (138) para el
ººº desplazamiento selectivo hacia el exterior con respecto al eje de rotación (106) para encajar los dientes (134) en sus receptáculos de diente (138) correspondientes.
6. Dispositivo según la reivindicación 5, que comprende además un dispositivo de accionamiento (142) conectado funcionalmente entre por lo menos uno de los
ººº dientes (134) y su base respectiva (138) para accionar por lo menos uno de los dientes (134) hacia el exterior encajando en su receptáculo de diente (138) correspondiente.
7. El dispositivo de la reivindicación 4, en el que: cada tetón de arrastre (120) del conector macho (112) termina en una superficie
ººº extrema (122) sustancialmente plana encarada axialmente, en un extremo distal del mismo y las superficies extremas (122) de la totalidad de la pluralidad de tetones de arrastre, en combinación, definen una superficie de encaje axial del conector macho (112) encarada axialmente; cada tetón de arrastre (120) presenta asimismo unas paredes laterales (124) del
ººº tetón de arrastre anguladas en oposición que convergen hacia el exterior, truncadas por la superficie extrema plana (122) en el extremo distal, convergiendo las paredes laterales (124) del tetón de arrastre de tal modo que, si se extendiesen más allá del extremo distal del tetón de arrastre, interseccionarían
a lo largo de una línea dirigida sustancialmente radialmente que se extiende ortogonalmente a través del eje de rotación (106); cada receptáculo de tetón (128) del conector hembra (114) comprende una superficie inferior (130) del mismo, sustancialmente plana, encarada axialmente,
ºº adaptada para encajar la superficie plana (122) en el extremo distal de uno de los tetones de arrastre (120) y las superficies inferiores planas (130) de todos los receptáculos (128), combinadas, definen una superficie de encaje del conector hembra (114) encarada axialmente; cada receptáculo de tetón de arrastre (128) presenta asimismo unas paredes
ººº laterales (132) del receptáculo de tetón que divergen hacia el exterior anguladas en oposición, truncadas por la pared inferior plana (130) del receptáculo (128), conformando las paredes laterales (132) del receptáculo de tetón unas superficies de contacto complementarias para acoplar con las paredes laterales
(124) del tetón de arrastre con un contacto sustancialmente íntimo, y
ººº simultáneamente con las superficies extremas (122) de los tetones (120) acoplándose en contacto sustancialmente íntimo con las paredes inferiores (130) de los receptáculos de tetón (128); el conector macho (112) comprende además un par de dientes desplazables
(134) fijados funcionalmente a la base (116) del conector macho (112) en lados
ººº opuestos de cada uno de los tetones de arrastre (120) para el desplazamiento selectivo hacia el exterior desde el eje de rotación (106) a lo largo de los lados de cada tetón de arrastre (120) hasta una posición enclavada de los dientes (134), y hacia el interior hacia el eje de rotación (106) a lo largo de los lados de los tetones de arrastre (120) hasta una posición desenclavada de los dientes
ººº (134), con el extremo de cada diente (134) presentando una superficie de contacto (136) del mismo angulada hacia el interior encarada sustancialmente axialmente; y el conector hembra (114) comprende adicionalmente un par de receptáculos de diente (138) fijados firmemente a la base (126) del conector hembra (114) en
ººº lados opuestos de cada uno de los receptáculos de tetón de arrastre (128) para recibir en su interior uno de los dientes (134) del conector macho (112) en cada receptáculo de diente (138), cuando los dientes (134) se disponen en la posición enclavada;
cada uno de los receptáculos de diente (138) presenta una superficie inferior
(140) sustancialmente plana angulada en oposición a la superficie angulada
(136) de los dientes, de tal modo que, cuando los dientes (134) del conector macho (112) se desplazan hacia el exterior, las superficies de contacto
ºº complementarias (136, 140) de los dientes (134) y los receptáculos de diente
(138) encajan entre sí deslizándose y tiran de los extremos distales (122) de los tetones de arrastre (120) formando un contacto sustancialmente íntimo con las superficies inferiores (130) de los receptáculos de tetón de arrastre (128) mientras que simultáneamente tira asimismo de las superficies laterales (124)
ººº del tetón de arrastre formando un contacto sustancialmente íntimo con las paredes laterales (132) del receptáculo de tetón.
8. Dispositivo según la reivindicación 7, en el que el conector macho (112) comprende adicionalmente un dispositivo de accionamiento del diente (142) separado para cada diente (134), conectado funcionalmente entre la base (116) y su diente respectivo
ººº (134), para accionar el diente (134) entre las posiciones enclavada y desenclavada.
9. Dispositivo según la reivindicación 8, en el que el dispositivo de accionamiento del diente (142) comprende un dispositivo de carro deslizante (144) que fija funcionalmente el diente (134) a la base (116), y un cilindro neumático (146) fijado funcionalmente entre el carro (144) y la base (116).
ººº 10. Dispositivo según la reivindicación 9, que comprende además un dispositivo de impulsión brusca de gas (148), conectado funcionalmente entre el carro (144) y la base (116) para dirigir el carro (144) y el diente (134) sujeto al mismo, a la posición enclavada del diente (134).
11. Dispositivo según la reivindicación 8, que comprende además un dispositivo de
ººº actuación manual (158) adaptado para la fijación desmontable al diente (134), para desplazar el diente (134) entre las posiciones enclavada y desenclavada del diente (134).
12. Dispositivo según la reivindicación 7, que comprende además una pluralidad de
conectores hembra y/o macho (112, 114), ajustable para el uso intercambiable entre ººº sí.
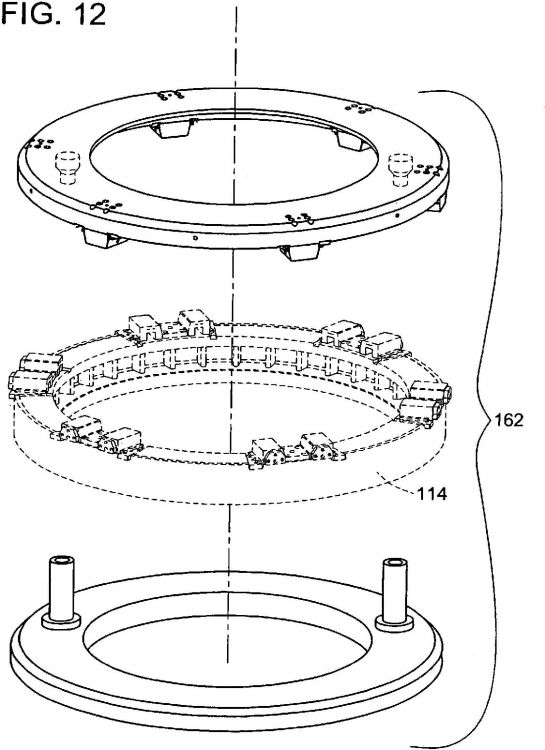
13. Dispositivo según la reivindicación 12, que comprende además un posicionador maestro (160, 162) para ajustar los elementos de acoplamiento de los conectores macho y/o hembra (112, 114) al grado pretendido de ajuste de contacto íntimo.
14. Dispositivo según la reivindicación 13, que comprende además una pluralidad de herramientas (104) que comprenden unos conectores hembra (114) fijados respectivamente a las mismas y ajustados mediante un posicionador maestro (162) para acoplarse con un conector macho (112) individual.
ºº 15. Dispositivo según la reivindicación 7, en el que los tetones de arrastre (120) se fijan a la base del conector macho (112) con unos suplementos de relleno ajustables (180, 182).
16. Dispositivo según la reivindicación 7, en el que las paredes laterales (132) del receptáculo de tetón de arrastre (128) se definen mediante dos bloques laterales de
ººº receptáculo de tetón (166, 168) separados, fijados a la base del conector hembra
(126) de modo que se puedan ajustar, para el desplazamiento relativo entre sí a lo largo de un eje cordal que se extiende perpendicularmente a un eje radial que se extiende ortogonalmente hacia el exterior partiendo del eje de rotación (106).
17. Dispositivo según la reivindicación 16, en el que cada uno de los bloques laterales de
ººº receptáculo de tetón (166, 168) comprende un receptáculo de diente (138).
18. Dispositivo según la reivindicación 7, en el que los tetones de arrastre (120) comprenden unos pasos de aire comprimido (188) en su interior, mediante los cuales se puede medir la fuga de aire entre las superficies de contacto (122, 124; 130, 132) de los tetones de arrastre (120) y los receptáculos de tetón de arrastre (128) como un
ººº indicador del grado de ajuste íntimo entre las superficies de contacto.
19. Procedimiento para unir una herramienta de colocación de la fibra (104) a una máquina de colocación de la fibra (102) a lo largo de un eje de rotación (106) de la máquina de colocación de la fibra (102), que comprende:
la unión de la herramienta de colocación de la fibra (104) a la máquina de
ººº colocación de la fibra (102) con un dispositivo de conexión que comprende un conector macho (112) y un conector hembra (114), adaptados para el acoplamiento desmontable selectivo entre sí a lo largo del eje de rotación (106); en el que el conector macho (112) comprende una base (116) del mismo adaptada para la sujeción, de modo que pueda girar, a la máquina de colocación
ººº de la fibra (102) para el giro de la base (116) alrededor del eje de rotación (106), y una pluralidad de tetones de arrastre macho espaciados circunferencialmente
(120) que se extienden axialmente desde la base del conector macho (116); y en el que el conector hembra (114) comprende una base (126) del mismo adaptada para la sujeción, de modo que pueda girar, a la herramienta (104) para el giro alrededor del eje de rotación (106), y una pluralidad de receptáculos de tetón de abertura axial (128) fijados a la base del conector hembra (126) en un
ºº patrón espaciado sustancialmente circunferencialmente, para recibir los tetones de arrastre (120) en los receptáculos (128) correspondientes cuando los conectores macho y hembra (112, 114) se encuentran encajados entre sí; llevando las bases (116, 126) de los conectores macho y hembra (112, 114) a la yuxtaposición funcional entre sí y acoplando funcionalmente los receptáculos
ººº (128) del conector hembra (114) con los tetones de arrastre macho (120) del conector macho (112).
20. Procedimiento según la reivindicación 19, en el que el dispositivo comprende adicionalmente unos dientes (134) y unos receptáculos de diente correspondientes
(138) conectados funcionalmente a las bases (116, 126) de los conectores macho y
ººº hembra (112, 114) para el desplazamiento relativo entre sí y para el desplazamiento selectivo hacia el exterior con respecto al eje de rotación (106), para acoplar, de este modo, los dientes (134) en sus receptáculos de diente correspondientes (138), y el procedimiento comprende adicionalmente el desplazamiento selectivo de los dientes
(134) hacia el exterior con respecto al eje de rotación (106), para encajar, de este
ººº modo, los dientes (134) en sus receptáculos de diente (138) respectivos.
21. Procedimiento según la reivindicación 20, en el que el dispositivo comprende adicionalmente un dispositivo de accionamiento (142) conectada funcionalmente entre por lo menos uno de los dientes (134) y la base (116) para el giro con el conector macho (112) y para accionar por lo menos uno de los dientes (134) hacia el
ººº exterior para encajar con su homólogo de los receptáculos de diente (138) del conector hembra (114), y el procedimiento comprende adicionalmente el funcionamiento del dispositivo de accionamiento (142) para accionar por lo menos uno de los dientes (134) para su encaje con su receptáculo de diente (138) respectivo.
Patentes similares o relacionadas:
Glicoproteínas sialiladas, del 25 de Marzo de 2020, de MOMENTA PHARMACEUTICALS, INC: Procedimiento para producir una preparación de glicoproteínas que comprenden regiones Fc que comprenden glicanos ramificados que comprenden un brazo α1,3 […]
Procedimientos para determinar si un paciente logrará una respuesta después de la radioterapia, del 14 de Agosto de 2019, de INSTITUT NATIONAL DE LA SANTE ET DE LA RECHERCHE MEDICALE (INSERM): Un procedimiento para determinar si un paciente que padece un cáncer logrará una respuesta después de la radioterapia que comprende las etapas de: i) determinar […]
Métodos para medir actividad enzimática, útiles para determinar la viabilidad celular en muestras no purificadas, del 24 de Julio de 2019, de Momentum Bioscience Limited: Un kit de ensayo para uso en un método para la detección de la actividad de la polimerasa como un indicador de la presencia de un microrganismo […]
Conjugados de proteína-agente activo y método para preparar los mismos, del 26 de Junio de 2019, de LegoChem Biosciences, Inc: Conjugado anticuerpo-agente activo, en el que el anticuerpo tiene un resto de aminoácido que puede ser reconocido por una isoprenoide transferasa, en el que el agente […]
ADN polimerasas de tipo A modificadas, del 19 de Junio de 2019, de Kapa Biosystems, Inc: Una ADN polimerasa Taq modificada que cataliza la polimerización de desoxinucleótidos y: (a) tiene una secuencia de aminoácidos que es al menos un 95 % idéntica a la […]
Sistemas y procedimientos para predecir la respuesta al minoxidil para el tratamiento de la alopecia androgenética, del 5 de Junio de 2019, de Follea International Ltd: Procedimiento de selección de un tratamiento para un sujeto que padece alopecia androgenética, que comprende: (i) realizar un ensayo para medir la actividad […]
Método para determinar la respuesta del cáncer a tratamientos dirigidos al receptor del factor de crecimiento epidérmico, del 8 de Mayo de 2019, de THE GENERAL HOSPITAL CORPORATION: Uso de cebadores para amplificar un ácido nucleico objetivo en el dominio de la quinasa del gen erbB1, en un método que predice la probabilidad de efectividad de un inhibidor […]
Método para determinar la respuesta del cáncer a tratamientos dirigidos al receptor del factor de crecimiento epidérmico, del 8 de Mayo de 2019, de THE GENERAL HOSPITAL CORPORATION: Un método para determinar la probabilidad de efectividad de un inhibidor de tirosina quinasa del EGFR para tratar cáncer en un paciente afectado con cáncer, que comprende: […]