PROCEDIMIENTO Y MAQUINA PARA LA PODA AUTOMATICA DE LA VID.
Procedimiento de poda automática de la vid cultivada según el modo de guiado en cordón denominado en cordón de Royat según el cual al menos un cordón se fija en un alambre portador aproximadamente horizontal,
o prácticamente paralelo al suelo, caracterizado porque se efectúan las operaciones siguientes: - prepoda de al menos la totalidad de la madera que se eleva por encima de los cordones por medio de un primer módulo de corte que permite extraer de la espaldera la madera cortada que procede de esta prepoda; - localización, en el espacio, de los cordones por medio de al menos un sistema de reconocimiento de posición, y uso de las informaciones recogidas por dicho sistema para controlar el posicionamiento de los miembros de corte de un segundo módulo de corte que trabajan a continuación de dicho primer módulo de prepoda para realizar un corte limpio de la madera de poda restante obtenida de la periferia del cordón, a una corta distancia predeterminada con respecto a dicho cordón
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08358012.
Solicitante: PELLENC (SOCIETE ANONYME).
Nacionalidad solicitante: Francia.
Dirección: ROUTE DE CAVAILLON, QUARTIER NOTRE DAME, 84120 PERTUIS.
Inventor/es: PELLENC,ROGER.
Fecha de Publicación: .
Fecha Solicitud PCT: 30 de Septiembre de 2008.
Fecha Concesión Europea: 30 de Junio de 2010.
Clasificación Internacional de Patentes:
- A01G3/04 NECESIDADES CORRIENTES DE LA VIDA. › A01 AGRICULTURA; SILVICULTURA; CRIA; CAZA; CAPTURA; PESCA. › A01G HORTICULTURA; CULTIVO DE HORTALIZAS, FLORES, ARROZ, FRUTOS, VID, LÚPULO O ALGAS; SILVICULTURA; RIEGO (recolección de frutas, verduras, lúpulo o productos similares A01D 46/00; crecimiento de algas unicelulares C12N 1/12). › A01G 3/00 Instrumentos de corte especialmente adaptados para la horticultura; Desramado de árboles en pie (desramadoras A01G 23/095). › Aparatos para cortar los setos, p. ej. cizallas para setos.
Clasificación PCT:
- A01G3/04 A01G 3/00 […] › Aparatos para cortar los setos, p. ej. cizallas para setos.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
La presente invención se refiere a un procedimiento y una máquina para la poda automática de vides cultivadas según el modo de guiado en cordón denominado "en cordón de Royat" según el cual al menos un sarmiento fructífero o cordón se fija alrededor de un alambre portador horizontal, generalmente por enrollado en espiral de dicho cordón.
En el campo de la viticultura, existe una intensa competencia entre los productores en el plano mundial. Los precios de coste constituyen uno de los criterios determinantes para mantenerse competitivos. Estos precios de coste proceden, en una gran parte, de técnicas de cultivo implementadas en los viñedos. La mecanización de las operaciones vinícolas, como, por ejemplo, la prepoda, el desmoche, la vendimia, el tratamiento de la vendimia, ha permitido reducir los puestos de mano de obra y disminuir así los costes de producción. La poda constituye, sin embargo, el puesto de mano de obra más costoso, ya que necesita siempre una fase de recolección manual a continuación de la prepoda mecánica de la vid. En efecto, la prepoda mecánica de la vid permite seccionar y separar el máximo de la madera o sarmientos cuyos zarcillos se fijan a los alambres de la espaldera, a una distancia reducida del cordón. Sin embargo, la prepoda no permite controlar con precisión la longitud de la madera que debe permanecer unida al cordón, ni en consecuencia el número de yemas o brotes fructíferos que incluyen esta madera. Así pues se efectúa obligatoriamente una recolección manual a continuación de la prepoda, con el fin de ajustar la longitud de la madera al número de yemas que deben conservarse. Por otra parte, esta recolección manual tiene por objeto eliminar la madera olvidada, sobre todo lateralmente y debajo del cordón, así como los crecimientos en el tronco. La poda manual pretende, en consecuencia, asegurar la precisión de la poda, lo que permite al viticultor establecer el rendimiento de producción deseado con el fin de mantener la calidad de la cantidad de vino producida. Un inconveniente importante de la poda manual es el tiempo necesario para efectuarla, lo que representa un porcentaje importante del coste de producción.
Con el fin de mejorar los resultados de la operación de prepoda, el solicitante ha diseñado un procedimiento y un dispositivo de análisis de la estructura de hileras de cultivo (documento WO-2004/089.063) que, asociado a una máquina de prepoda, por ejemplo, del tipo descrito en el documento EP-0.312.126, permite mantener los miembros de corte de la prepodadora por encima y a distancia suficiente del cordón, con el fin de evitar el riesgo de dañar este último y de evitar la eliminación de yemas fructíferas que es deseable conservar, conservando en todo momento la madera de poda o esforrocinos, lo más corta posible.
En efecto, si es posible regular la altura de los miembros de corte de la máquina, a la entrada de una fila, su posición con respecto al cordón puede encontrarse modificada durante su desplazamiento en esta fila, con motivo de las irregularidades del suelo, de manera que en caso de bajada repentina resultante del paso de dicha máquina por un hoyo del
terreno, el cordón puede verse dañado o desprovisto de sus yemas fructíferas.
Las prepodadoras equipadas de un dispositivo de análisis de la estructura de hileras de cultivo según se describe en el documento WO-2004/089.063 no permiten:
- un corte suficientemente preciso para eximirse de una operación ulterior de poda o limitar notablemente el tiempo de recolección manual;
- la poda de la madera que se desarrolla lateralmente o debajo del cordón.
La presente invención tiene especialmente como objeto permitir:
- una poda suficientemente precisa de la madera por encima del cordón, de manera que, si no se elimina totalmente la operación de recolección manual, al menos se limita considerablemente el tiempo de esta recolección, incluso para efectuar una sola poda manual bienal o trienal que satisfaga completamente los imperativos de la poda;
- una poda completada alrededor del cordón.
Según la invención, este objetivo se consigue gracias a:
- un procedimiento según el cual se efectúan las operaciones siguientes: -prepoda de al menos la totalidad de la madera que se eleva por encima de los cordones por medio de un primer módulo de corte que permite extraer de la espaldera la madera cortada resultante de esta prepoda;
- localización, en el espacio, de los cordones por medio de al menos un sistema de reconocimiento de posición y uso de las informaciones recogidas por dicho sistema para controlar el posicionamiento de los miembros de corte de un segundo módulo de corte que trabaja a continuación de dicho primer módulo de prepoda para realizar un corte limpio de la madera de poda restante obtenida de la periferia del cordón, a una corta distancia predeterminada con respecto a dicho cordón.
- una máquina notable principalmente porque comprende dos módulos instalados en un bastidor común y dispuestos a continuación uno del otro considerando el sentido de avance de dicha máquina, en curso de trabajo, es decir: por una parte, un primer módulo de prepoda, por ejemplo del tipo que comprende dos conjuntos de corte constituidos cada uno por una pluralidad de miembros de corte rotatorios o de miembros rotatorios que participan en la acción de corte, superpuestos y transportados por un eje común, y, por otra parte, un segundo módulo de poda corta que incluye miembros de corte y al menos un sistema de reconocimiento de posición dispuesto o configurado para permitir la localización, en el espacio, de los cordones y para controlar el posicionamiento de los miembros de corte de este segundo módulo para realizar un corte limpio de la madera de poda restante obtenida de la periferia del cordón, a una corta distancia predeterminada con res
pecto a dicho cordón.
Según un modo de implementación muy ventajoso del procedimiento, el sistema electrónico controla el posicionamiento de los miembros de corte del segundo módulo en función de los parámetros de velocidad de desplazamiento de la máquina y de predeterminación, por el operador, de la distancia de corte con respecto al cordón.
Según un modo de implementación preferido del procedimiento aplicable a una máquina cuyos miembros de corte laterales del segundo módulo están guiados en su desplazamiento a ambas partes de los cordones por peines rotatorios, estos últimos pueden ser arrastrados en rotación a una velocidad cercana a la velocidad de avance de la máquina en curso de trabajo.
Según una disposición característica de la invención, el módulo de poda corta incluye al menos dos miembros de corte destinados a evolucionar por encima de los cordones, estando estos miembros de corte superiores dispuestos horizontalmente o, según una configuración en V invertida.
Según otra disposición característica de la invención, el módulo de poda corta incluye al menos dos miembros de corte destinados a evolucionar por debajo de los cordones, estando estos miembros de corte inferiores dispuestos horizontalmente o según una configuración en V.
Según otra disposición característica de la invención, el módulo de poda corta comprende medios que aseguran la separación automática y la recuperación automática en posición activa de acercamiento de los miembros de corte superiores al paso de los postes de la espaldera y si es necesario al paso de las cepas.
Según otra disposición característica de la invención, el módulo de poda corta comprende medios que aseguran la separación automática y la recuperación automática en posición activa de acercamiento de los miembros de corte inferiores al paso de los postes de la espaldera y al paso de las cepas.
Según otra disposición característica de la invención, el módulo de poda corta comprende al menos dos miembros de corte laterales destinados a evolucionar a ambas partes de los cordones.
Según otra disposición característica de la invención, los miembros de corte del módulo de poda corta incluyen herramientas de corte circulares, por ejemplo sierras.
Según otra disposición característica de la invención, los medios que aseguran la separación automática de los miembros de corte superiores y/o inferiores están constituidos por poleas guía o motorizadas, teniendo estas poleas un radio ligeramente superior al radio de acción de los miembros de corte....
Reivindicaciones:
1. Procedimiento de poda automática de la vid cultivada según el modo de guiado en cordón denominado "en cordón de Royat" según el cual al menos un cordón se fija en un alambre portador aproximadamente horizontal, o prácticamente paralelo al suelo, caracterizado porque se efectúan las operaciones siguientes:
- prepoda de al menos la totalidad de la madera que se eleva por encima de los cordones por medio de un primer módulo de corte que permite extraer de la espaldera la madera cortada que procede de esta prepoda;
- localización, en el espacio, de los cordones por medio de al menos un sistema de reconocimiento de posición, y uso de las informaciones recogidas por dicho sistema para controlar el posicionamiento de los miembros de corte de un segundo módulo de corte que trabajan a continuación de dicho primer módulo de prepoda para realizar un corte limpio de la madera de poda restante obtenida de la periferia del cordón, a una corta distancia predeterminada con respecto a dicho cordón.
2. Máquina de poda automática de la vid cultivada según el modo de guiado en cordón denominado "en cordón de Royat", caracterizada porque comprende dos módulos montados en un bastidor común, dispuestos a continuación uno del otro considerando el sentido de avance de dicha máquina, en curso de trabajo, es decir: por una parte, un primer módulo de prepoda (1), del tipo que comprende dos conjuntos de corte
(3) que evolucionan a ambas partes de la fila de vides y, por otra parte, un segundo módulo de poda corta (2) que incluye miembros de corte (10, 11, 12) y al menos un sistema de reconocimiento de posición dispuesto o configurado para permitir la localización, en el espacio, de los cordones y, para controlar el posicionamiento de los miembros de corte de este segundo módulo (10, 11, 12) para realizar un corte limpio de la madera de poda restante que procede de la periferia del cordón, a una corta distancia predeterminada con respecto a dicho cordón.
3. Procedimiento según la reivindicación 1, caracterizado porque la detección de la localización, en el espacio, del cordón es realizada por medio de al menos un sistema de visión artificial.
4. Procedimiento según una de las reivindicaciones 1 ó 3, caracterizado porque el análisis de las informaciones comunicadas por el sistema de reconocimiento y el control del posicionamiento de los miembros de corte es realizado por un sistema electrónico.
5. Procedimiento según una cualquiera de las reivindicaciones 1, 3 ó 4, caracterizado porque el sistema de detección de la localización, en el espacio, del cordón permite definir la velocidad de desplazamiento de la máquina.
6. Procedimiento según una cualquiera de las reivindicaciones 1 ó 3 a 5, caracterizado porque el sistema electrónico controla el posicionamiento de los miembros de corte (10, 11, 12) del segundo módulo (2) en función de los parámetros de velocidad de desplazamiento de la máquina y de predeterminación, por el operador, de la distancia de corte con respecto al cordón.
7. Procedimiento según una cualquiera de las reivindicaciones 1 ó 3 a 6, caracterizado porque los miembros de corte laterales (12) del segundo módulo (2) son guiados en sus desplazamientos a ambas partes del cordón por peines rotatorios (27).
8. Máquina según la reivindicación 2, caracterizada porque el sistema de reconocimiento de posición comprende al menos un sistema de visión artificial (9), que permite la localización, en el espacio, del cordón (C).
9. Máquina según una de las reivindicaciones 2 u 8, caracterizada porque el sistema de reconocimiento de posición comprende un sistema electrónico de análisis que permite detectar y seguir los contornos superiores e inferiores del cordón (C).
10. Máquina según una cualquiera de las reivindicaciones 2, 8 ó 9, caracterizada porque el sistema de reconocimiento de posición está dispuesto o configurado para definir la velocidad de desplazamiento de la máquina.
11. Máquina según una cualquiera de las reivindicaciones 2 u 8 a 10, caracterizada porque el sistema de reconocimiento incluye un sistema electrónico de análisis y de control que permite controlar los accionadores de posicionamiento de los miembros de corte (10, 11, 12) del segundo módulo (2) y seguir los contornos del cordón (C) a una distancia predeterminada.
12. Máquina según una cualquiera de las reivindicaciones 2 u 8 a 11, caracterizada porque el módulo de poda corta (2) incluye al menos dos miembros de corte superiores (10) destinados a evolucionar por encima de los cordones, estando dispuestos estos miembros de corte superiores (10) horizontalmente o según una configuración en V invertida, preferentemente con un ángulo de sesgo de unos grados hacia abajo y hacia delante con respecto al sentido de avance.
13. Máquina según la reivindicación 12, caracterizada porque el módulo de poda corta
(2) comprende medios que aseguran la separación automática y la recuperación automática en posición activa de acercamiento de los miembros de corte superiores
(10) al paso de los postes de la espaldera y, si es necesario, al paso de las cepas, en el caso de dobles cordones superpuestos.
14. Máquina según la reivindicación 12, caracterizada porque el módulo de poda corta
(2) comprende al menos un accionador (49) eléctrico o hidráulico pilotado por el operador que asegura la separación y la recuperación en posición activa de acercamiento de los miembros de corte superiores (10), por ejemplo para las entradas y salidas de las filas trabajadas.
15. Máquina según una cualquiera de las reivindicaciones 12, 13 ó 14, caracterizada porque los miembros de corte superiores (10) se montan con una posibilidad de desplazamiento lateral independiente.
16. Máquina según una cualquiera de las reivindicaciones 2 u 8 a 15, caracterizada porque el módulo de poda corta (2) incluye al menos dos miembros de corte inferiores (11) destinados a evolucionar por debajo de los cordones, estando dispuestos estos miembros de corte inferiores (11) horizontalmente o según una configuración en V, preferentemente con un ángulo de sesgo de algunos grados hacia arriba y hacia delante con respecto al sentido de avance.
17. Máquina según la reivindicación 16, caracterizada porque el módulo de poda corta
(2) comprende medios que aseguran la separación automática y la recuperación automática en posición activa de acercamiento de los miembros de corte inferiores (11) al paso de los postes de la espaldera y al paso de las cepas.
18. Máquina según la reivindicación 16, caracterizada porque el módulo de poda corta
(2) comprende accionadores (49) eléctricos o hidráulicos dirigidos por el operador que aseguran la separación y la recuperación en posición activa de acercamiento de los miembros de corte inferiores (11), por ejemplo para las entradas y salidas de las filas trabajadas.
19. Máquina según una cualquiera de las reivindicaciones 16, 17 ó 18, caracterizada porque los miembros de corte inferiores (11) están montados con una posibilidad de desplazamiento lateral independiente.
20. Máquina según una de las reivindicaciones 13 ó 17, caracterizada porque los me
dios que aseguran la separación automática de los miembros de corte superiores
(10) y/o inferiores (11) están constituidos por poleas guía o motorizadas (17), teniendo estas poleas un radio ligeramente superior al radio de acción de las herramientas de corte (15).
21. Máquina según una cualquiera de las reivindicaciones 2 u 8 a 20, caracterizada porque el módulo de poda corta (2) comprende al menos dos miembros de corte laterales (12) destinados a evolucionar a ambas partes de los cordones.
22. Máquina según la reivindicación 21, caracterizada porque se disponen peines rotatorios (27) delante de la cara interna de los miembros de corte laterales (12).
23. Máquina según la reivindicación 22, caracterizada porque los peines rotatorios (27) incluyen dedos curvos (27a), dispuestos alrededor del borde de corte de los miembros de corte laterales (12).
24. Máquina según una cualquiera de las reivindicaciones 21 a 23, caracterizada porque los miembros de corte laterales (12) del módulo de poda corta (2) están montados con una posibilidad de desplazamiento lateral independiente.
25. Máquina según una cualquiera de las reivindicaciones 21 a 24, caracterizada porque los miembros de corte laterales (12) del módulo de poda corta (2) están montados con una posibilidad de retirada hacia atrás y hacia arriba con respecto al sentido de avance.
26. Máquina según una cualquiera de las reivindicaciones 21 a 25, caracterizada porque los miembros de corte laterales (12) del módulo de poda corta (2) están equipados con esquíes de guiado.
27. Máquina según una cualquiera de las reivindicaciones 2 u 8 a 26, caracterizada porque los miembros de corte (10, 11, 12) del módulo de poda corta (2) incluyen herramientas de corte circulares (15), por ejemplo hojas de sierras circulares.
28. Máquina según una cualquiera de las reivindicaciones 2, u 8 a 27, caracterizada porque las herramientas de corte circulares (15) de los miembros de corte (10, 11, 12) son arrastradas independientemente por motores (16), por ejemplo, por motores eléctricos o hidráulicos.
29. Máquina según una cualquiera de las reivindicaciones 2 ó 12 a 28, caracterizada
porque el módulo de poda corta (2) incluye un sistema de subida y bajada que permite al conjunto de los miembros de corte superiores (10), laterales (12) e inferiores
(11) desplazarse para seguir los cordones con una precisión de unos milímetros.
30. Máquina según una cualquiera de las reivindicaciones 2 ó 12 a 29, caracterizada porque el módulo de poda corta (2) incluye un sistema de subida y bajada que permite a los miembros de corte superiores (10) por encima de los cordones seguir a dichos cordones en altura con una gran precisión de unos milímetros.
31. Máquina según una cualquiera de las reivindicaciones 2 ó 12 a 30, caracterizada porque el módulo de poda corta (2) incluye un sistema de subida y bajada que permite a los miembros de corte superiores (10) y a los miembros de corte laterales (12) desplazarse para seguir los cordones con una precisión de unos milímetros.
32. Máquina según una cualquiera de las reivindicaciones 16 a 31, caracterizada porque el módulo de poda corta (2) incluye un sistema de subida y bajada que permite a los miembros de corte inferiores (11) efectuar, bajo los cordones, un corte de la madera a una distancia precisa de los cordones, de unos milímetros.
33. Máquina según una cualquiera de las reivindicaciones 29 a 32, caracterizada porque los sistemas de subida y bajada de los miembros de corte del módulo de poda corta (2) están controlados por el sistema electrónico de análisis y de control de la máquina.
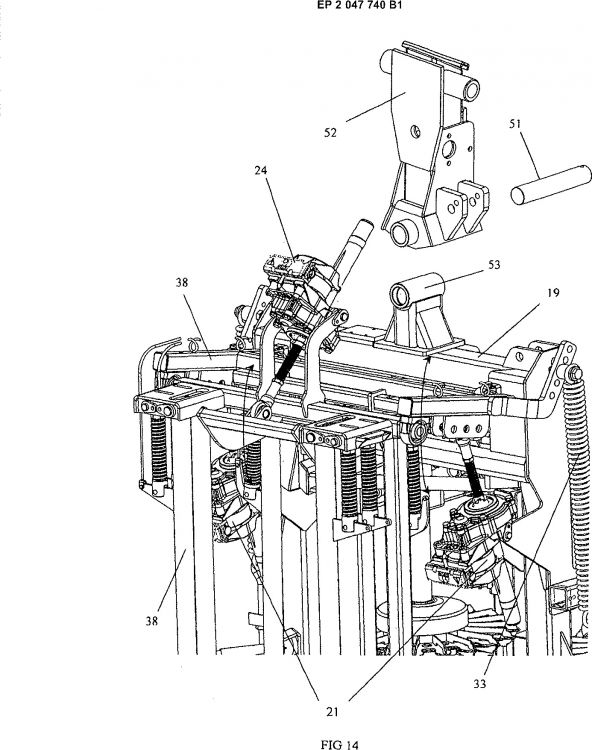
34. Máquina según una cualquiera de las reivindicaciones 29 a 33, caracterizada porque los sistemas de subida y bajada de los miembros de corte del módulo de poda corta (2) comprenden accionadores eléctricos o hidráulicos (21, 24).
35. Máquina según una cualquiera de las reivindicaciones 29 a 34, caracterizada porque los accionadores eléctricos o hidráulicos (21, 24) de los sistemas de subida y bajada de los miembros de corte del módulo de poda corta (2) están asistidos por muelles (33).
36. Máquina según la reivindicación 35, caracterizada porque los accionadores (21, 24) de los miembros de corte (10, 11, 12) están provistos de sensores de posición (36, 37) que participan en los sistemas de control de dichos accionadores.
37. Máquina según una cualquiera de las reivindicaciones 2 u 8 a 36, caracterizada porque comprende medios de centrado, que permiten colocarla con respecto a los
pies de vid (V) y a los postes (P).
38. Máquina según la reivindicación 37, caracterizada porque los medios de centrado están constituidos por esquíes de guiado (35) separados, dispuestos horizontalmente
5 o aproximadamente horizontalmente a ambas partes del plano vertical medio de trabajo de la máquina.
39. Máquina según una cualquiera de las reivindicaciones 2 u 8 a 38, que comprende un vehículo portador (43), caracterizada porque el bastidor (19) de dicha máquina comprende un medio de suspensión (53) por medio del cual se monta en el extremo de un brazo portador (34) de dicho vehículo.
Patentes similares o relacionadas:
Dispositivo de sierra para la poda de plantas, del 22 de Julio de 2020, de Fliegl Agro-Center GmbH: Dispositivo de sierra para la poda de plantas, en particular ramas, que comprende - un bastidor de soporte para el montaje del dispositivo […]
Aparato y procedimiento de retirada mejorada, del 9 de Octubre de 2019, de HONEYPOT HOLDINGS LIMITED: Un aparato para su uso en la retirada de un material irregular de una línea durante un movimiento relativo entre el aparato y la línea , incluyendo […]
Cortacésped de disco giratorio con una barra de corte lateral aligerada, del 23 de Enero de 2019, de BCS S.P.A.: Un cortacésped de disco giratorio con una barra de corte lateral aligerada que comprende un bastidor fijo , un bastidor móvil (14,14b) y un dispositivo […]
CABEZAL DE CORTE Y TRITURACIÓN DE VARETAS DEL OLIVAR, del 21 de Junio de 2018, de JIMÉNEZ LAREDO, José Antonio: Cabezal de corte y trituración de varetas del olivar que comprende dos tambores de cuchillas paralelos que giran dentro de un protector , movidos por sus ejes […]
CABEZAL DE CORTE Y TRITURACIÓN DE VARETAS DEL OLIVAR, del 18 de Junio de 2018, de JIMÉNEZ LAREDO, José Antonio: Cabezal de corte y trituración de varetas del olivar que comprende dos tambores de cuchillas paralelos que giran dentro de un protector […]
Método y aparato para retirar material de una línea, del 9 de Mayo de 2018, de HONEYPOT HOLDINGS LIMITED: Un aparato para retirar material irregular de una línea durante el movimiento relativo entre el aparato […]
Equipo de corte para hileras de plantas, del 3 de Mayo de 2017, de Fondazione Edmund Mach: Sistema de poda para hileras de plantación (F), que comprende una estructura que soporta al menos un conjunto de poda , comprendiendo dicho […]
Elemento y máquina de corte y de recogida de plantas, instrumento de trabajo que comprende un determinado elemento o una determinada máquina y proceso de corte y de recogida de plantas, del 11 de Mayo de 2016, de Marques Oliveira, José Manuel: Elemento de corte y de recogida de plantas, que comprende: - un órgano de corte concebido para cortar las plantas cuando el elemento de corte y de recogida es […]