PROCEDIMIENTO PARA LIMPIAR UNA SUPERFICIE DE SUELO MEDIANTE UN APARATO DE LIMPIEZA AUTOPROPULSADO, EN PARTICULAR UN ROBOT ASPIRADOR.
Procedimiento para limpiar una superficie de suelo mediante un aparato de limpieza autopropulsado,
en particular un robot (1) aspirador, que está equipado con una unidad (6) de accionamiento, una unidad (7) de control para controlar la dirección de desplazamiento y un dispositivo sensor para detectar un parámetro de estado dependiente de la posición, de la superficie de suelo, controlando la unidad (7) de control la dirección de desplazamiento en función del parámetro de estado dependiente de la posición, de la superficie de suelo, detectado con el dispositivo sensor, caracterizado porque el dispositivo (7) de control determina como parámetro de estado dependiente de la posición el grado de suciedad de zonas individuales de la superficie de suelo debido al volumen de suciedad recogido en las mismas durante la limpieza y detectado por el dispositivo sensor, lo almacena y controla la intensidad de tratamiento de una zona en un ciclo de tratamiento subsiguiente en función del grado de suciedad almacenado de esta zona de modo que las zonas se tratan de diferente manera según el grado de suciedad
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08001870.
Solicitante: MIELE & CIE. KG.
Nacionalidad solicitante: Alemania.
Dirección: ALEMANIA.
Inventor/es: ENNEN, GUNTHER, DR..
Fecha de Publicación: .
Fecha Solicitud PCT: 1 de Febrero de 2008.
Clasificación Internacional de Patentes:
- A47L9/28B2
- G05D1/02E14M
- G05D1/02E3D
Clasificación PCT:
- A47L9/28 NECESIDADES CORRIENTES DE LA VIDA. › A47 MOBILIARIO; ARTICULOS O APARATOS DE USO DOMESTICO; MOLINILLOS DE CAFE; MOLINILLOS DE ESPECIAS; ASPIRADORES EN GENERAL. › A47L LAVADO O LIMPIEZA DOMESTICA (cepillos A46B; limpieza de grandes cantidades de botellas o de otros objetos huecos de una sola especie B08B 9/00; lavado de la ropa D06F ); ASPIRADORES EN GENERAL (limpieza en general B08). › A47L 9/00 Partes constitutivas o accesorios de aspiradores, p. ej. medios mecánicos para controlar la aspiración o para producir una acción de batido; Dispositivos para la conservación ordenada de los aspiradores o de sus piezas; Vehículos portadores especialmente concebidos para los aspiradores. › Montaje del equipo eléctrico, p. ej. adaptación o fijación al aspirador; Control de los aspiradores por medios eléctricos.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Procedimiento para limpiar una superficie de suelo mediante un aparato de limpieza autopropulsado, en particular un robot aspirador.
La invención se refiere a un procedimiento para limpiar una superficie de suelo mediante un aparato de limpieza autopropulsado, en particular un robot aspirador, que está equipado con una unidad de accionamiento, una unidad de control para controlar la dirección de desplazamiento y un dispositivo sensor para detectar un parámetro de estado dependiente de la posición, de la superficie de suelo, controlando la unidad de control la dirección de desplazamiento en función del parámetro de estado dependiente de la posición, de la superficie de suelo, detectado con el dispositivo sensor.
Se conoce el uso de robots autopropulsados para limpiar superficies de suelo o para cortar el césped. Los sistemas sencillos trabajan según el principio del azar, es decir, en caso de colisionar con un obstáculo sólo cambian su dirección de desplazamiento. El objetivo es en cada caso un tratamiento lo más completo posible de una superficie de suelo, aceptándose también desplazarse múltiples veces sobre las mismas zonas. Para obtener la ventaja relacionada con ello de un sistema de sensores sencillo y económico debe emplearse más tiempo.
Los sistemas complejos contienen una navegación dirigida a un objetivo, que entre otras cosas incluye evitar colisiones. Para una planificación de trayecto razonable en un entorno desconocido es necesaria una localización y un mapeo simultáneos (SLAM - Simultaneous Location and Mapping). La localización se soporta normalmente mediante la detección de puntos concisos del entorno (hitos). Durante el recorrido del trayecto el robot debe esquivar además obstáculos y reaccionar frente a eventos actuales. Para ello ya se conocen diferentes procedimientos y estrategias utilizando diferentes tipos de sensor, por ejemplo odometría, sensores de distancia ópticos y acústicos. Los sistemas de 3D tales como escáneres láser o sistemas de cámara estereoscópicos proporcionan información detallada acerca del entorno del robot y distancias a obstáculos. El sistema de cámara estereoscópico es similar al sentido de la vista humano - mediante las diferencias en la imagen derecha e izquierda puede obtenerse información de profundidad mediante triangulación. Por el documento DE 196 14 916 A1 se conoce un robot de desplazamiento que para detectar y evaluar una imagen tridimensional del entorno de desplazamiento utiliza dos cámaras digitales.
Además de la información acerca de la naturaleza espacial del entorno pueden evaluarse también para la navegación parámetros de estado dependientes de la posición, de la superficie de suelo. Por el documento DE 102 61 787 B3 y por el documento DE 102 61 788 B3 se conocen aparatos de tratamiento de suelo del tipo mencionado al inicio. Estos aparatos almacenan valores de referencia dependientes de la posición, del estado de tratamiento, tras un tratamiento óptimo. Por tanto se determina en un "desplazamiento de aprendizaje" la suciedad restante que no puede eliminarse del suelo y durante los ciclos de tratamiento subsiguientes se intenta volver a este resultado determinado en el desplazamiento de aprendizaje. Es probable que diferentes zonas de una superficie de suelo presenten una suciedad diferente. El procedimiento de limpieza conocido por el documento DE 102 61 787 B3 o documento DE 102 61 788 B3 tiene esto en cuenta y no intenta proporcionar valores de limpieza "inalcanzables". Si bien se acorta de este modo la operación de limpieza en las zonas "sucias", a pesar de ello se realiza en primer lugar un intento de limpieza. Esto lleva a una carga de la superficie de suelo tratada, mayores duraciones de tratamiento y al mismo tiempo intervalos de tratamiento más cortos debido al elevado consumo energético y la descarga rápida de la batería relacionada con ello.
El documento US 2005/0166355 A1 describe un robot aspirador, que compara el volumen de polvo medido actualmente con un valor por defecto fijo y según el valor de polvo quede por debajo o supere el valor por defecto, cambia de un modo básico a un modo de limpieza local.
En un aparato para fregar autónomo según el documento US 5.613.261 también se conoce el hecho de comparar valores de suciedad medidos actualmente con un valor por defecto y controlar en función de esto la intensidad de limpieza. En este caso se mide como valor de suciedad un valor de reflexión.
Por el documento EP 0 759 157 B1 se conoce el uso de un sensor piezoeléctrico para demostrar la cantidad de polvo absorbida con una aspiradora.
La invención se plantea el problema de dar a conocer un procedimiento para limpiar una superficie de suelo del tipo mencionado al inicio, en el que se acorte la duración de tratamiento de las zonas individuales de la superficie de suelo y a pesar de ello se consiga un resultado satisfactorio.
Según la invención este problema se soluciona mediante un procedimiento con las características de la reivindicación 1. Configuraciones y perfeccionamientos ventajosos de la invención se obtienen de las reivindicaciones dependientes siguientes.
Las ventajas que pueden conseguirse con la invención consisten además del acortamiento ya mencionado de la duración de tratamiento (asociado con una protección de material del revestimiento de suelo y de la aspiradora, una mayor duración de la batería, ciclos de carga más cortos, una vida útil más larga de la batería, menos tiempo de acción, que puede percibirse como perturbador según el ruido y la presencia) en la consecución de un resultado de limpieza uniforme.
Un ejemplo de realización de la invención se representa en los dibujos de forma meramente esquemática y se describe a continuación con más detalle. Muestra
la figura 1 un corte a través de un aparato de limpieza según la invención;
la figura 2 un espacio con pistas del aparato de limpieza durante el primer desplazamiento;
la figura 3 el mapa de suciedad captado durante el primer desplazamiento;
la figura 4 la pista del aparato de limpieza durante la limpieza de las zonas muy sucias;
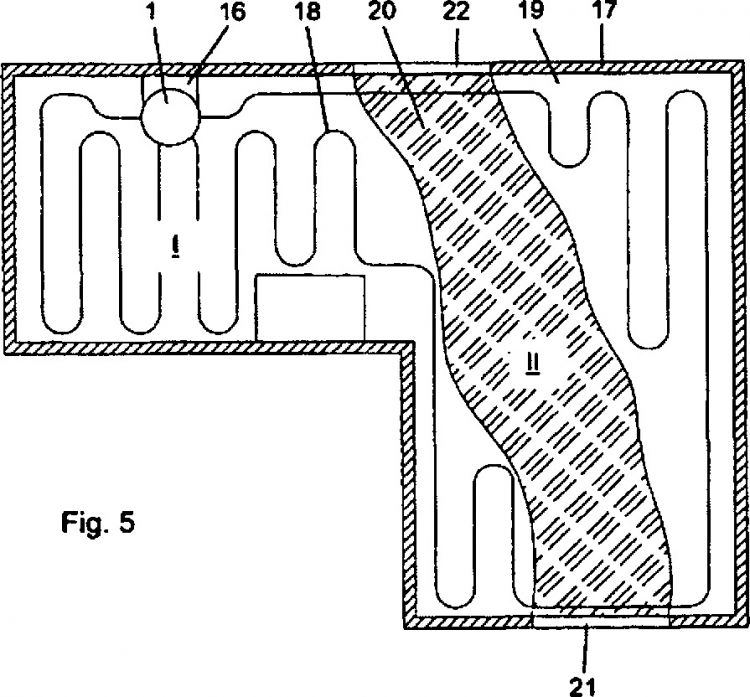
la figura 5 la pista del aparato de limpieza durante la limpieza de las zonas poco sucias.
En la figura 1 se representa de forma esquemática un aparato de limpieza autopropulsado, denominado a continuación robot 1 aspirador, que es adecuado para realizar el procedimiento según la invención. El robot 1 aspirador tiene una carcasa 2 con una placa 3 base, que se soporta por una estructura 5 de desplazamiento. La estructura 5 de desplazamiento está conectada con una unidad 6 de accionamiento, que navega el robot 1 aspirador de forma dirigida a un objetivo con ayuda de una unidad 7 de control. La navegación se realiza con ayuda de sensores 8 ópticos y procedimientos de control adecuados. El robot 1 aspirador tiene una unidad de limpieza compuesta por un cepillo 9 rotatorio y una boca 10 de aspiración que está conectada con un ventilador 12 a través de un conducto 11 de aspiración. Un motor 13 de número de revoluciones variable para hacer girar el cepillo 9 y un recipiente 14 de acumulación de polvo para acumular y filtrar la suciedad aspirada también se representan de forma simbólica. En el conducto 11 de aspiración se inserta un sensor 15 de cantidad de polvo piezoeléctrico conocido por el documento EP 0 759 157 B1. El sensor 15 transmite una señal eléctrica a la unidad 7 de control, que está correlacionada con la cantidad de suciedad aspirada en un punto.
La figura 2 muestra de manera esquemática el diseño básico de un espacio 17, en el que debe emplearse el robot 1 aspirador para la limpieza. La aspiradora 1 se simboliza mediante el círculo, su punto de partida forma una estación 16 de acoplamiento, en la que pueden cargarse elementos de batería no representados y vaciarse el recipiente 14 de acumulación de polvo. En el primer uso, que puede identificarse por ejemplo mediante una entrada de usuario correspondiente, el robot 1 aspirador recorre en un desplazamiento de aprendizaje de forma sistemática todo el espacio 17 sobre una pista 18 en forma de meandro y aspira con una potencia de ventilador y un número de revoluciones de cepillo máximos. Mediante los sensores 8 ópticos la unidad 7 de control crea a este respecto un mapa bidimensional del espacio 17 y se almacena en una memoria 4. Al mismo tiempo la unidad 7 de control asigna a cada punto en el mapa la parte de polvo absorbido medida en el mismo por el sensor...
Reivindicaciones:
1. Procedimiento para limpiar una superficie de suelo mediante un aparato de limpieza autopropulsado, en particular un robot (1) aspirador, que está equipado con una unidad (6) de accionamiento, una unidad (7) de control para controlar la dirección de desplazamiento y un dispositivo sensor para detectar un parámetro de estado dependiente de la posición, de la superficie de suelo, controlando la unidad (7) de control la dirección de desplazamiento en función del parámetro de estado dependiente de la posición, de la superficie de suelo, detectado con el dispositivo sensor,
caracterizado porque el dispositivo (7) de control determina como parámetro de estado dependiente de la posición el grado de suciedad de zonas individuales de la superficie de suelo debido al volumen de suciedad recogido en las mismas durante la limpieza y detectado por el dispositivo sensor, lo almacena y controla la intensidad de tratamiento de una zona en un ciclo de tratamiento subsiguiente en función del grado de suciedad almacenado de esta zona de modo que las zonas se tratan de diferente manera según el grado de suciedad.
2. Procedimiento para limpiar una superficie de suelo según la reivindicación 1, caracterizado porque como sensor se utiliza un sensor (15) de cantidad de polvo piezoeléctrico.
3. Procedimiento para limpiar una superficie de suelo según una de las reivindicaciones anteriores, caracterizado porque la intensidad de tratamiento se varía por la duración de tratamiento.
4. Procedimiento para limpiar una superficie de suelo según una de las reivindicaciones anteriores, caracterizado porque la intensidad de tratamiento se varía por la frecuencia de tratamiento.
5. Procedimiento para limpiar una superficie de suelo según una de las reivindicaciones anteriores, caracterizado porque la intensidad de tratamiento se varía por la potencia de aspiración de un ventilador (12) de aspiración.
6. Procedimiento para limpiar una superficie de suelo según una de las reivindicaciones anteriores, caracterizado porque la intensidad de tratamiento se varía por el número de revoluciones de un cepillo (9) de limpieza rotatorio.
7. Procedimiento para limpiar una superficie de suelo según una de las reivindicaciones anteriores, caracterizado porque la unidad de control determina durante un ciclo de tratamiento el grado de suciedad de la zona tratada en cada caso y actualiza el valor almacenado con el determinado actualmente mediante una operación matemática.
8. Procedimiento para limpiar una superficie de suelo según la reivindicación 7, caracterizado porque la unidad de control relaciona el grado de suciedad con la respectiva potencia de aspiración del ventilador (12) de aspiración y/o con el número de revoluciones del cepillo (9) de limpieza rotatorio.
Patentes similares o relacionadas:
 BOQUILLA DE ASPIRACIÓN PARA UNA ASPIRADORA CON UN DISPOSITIVO INDICADOR DEL FLUJO DE POLVO, del 2 de Marzo de 2011, de MIELE & CIE. KG: Boquilla de aspiración para una aspiradora , que puede conectarse a un tubo de aspiración y/o a un tubo flexible de aspiración, […]
BOQUILLA DE ASPIRACIÓN PARA UNA ASPIRADORA CON UN DISPOSITIVO INDICADOR DEL FLUJO DE POLVO, del 2 de Marzo de 2011, de MIELE & CIE. KG: Boquilla de aspiración para una aspiradora , que puede conectarse a un tubo de aspiración y/o a un tubo flexible de aspiración, […]
Estación de evacuación, del 17 de Junio de 2020, de IROBOT CORPORATION: Un robot móvil que comprende: un cuerpo configurado para atravesar una superficie y recibir residuos desde […]
Aparato de limpieza, así como accesorio para la unión a un dispositivo de base del aparato de limpieza, del 17 de Junio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Accesorio configurado como un cepillo de alfombra o como un accesorio de suelo duro para una aspiradora o como un accesorio de limpieza en mojado para […]
Aparato de limpieza de suelos y procedimiento de funcionamiento del mismo, del 29 de Abril de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza de suelos , por ejemplo un aspirador de polvo manualmente guiado, que comprende […]
Sistema y un procedimiento para la limpieza de un suelo con un robot de limpieza, del 22 de Abril de 2020, de VORWERK & CO. INTERHOLDING GMBH: Sistema para la limpieza de un suelo - con al menos un robot de limpieza y - con medios de control para el control del robot de limpieza […]
Aparato de tratamiento de suelos dotado de traslación automática, del 4 de Marzo de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato de tratamiento de suelos dotado de traslación automática, especialmente robot de limpieza, que comprende un elemento de tratamiento de […]
Robot de limpieza con un dispositivo para detectar una colisión, del 26 de Febrero de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato de tratamiento de superficies dotado de movilidad automática, especialmente robot de limpieza, que comprende una carcasa y un dispositivo […]
Aparato electrodoméstico y procedimiento para el funcionamiento de un aparato electrodoméstico, del 5 de Febrero de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato electrodoméstico , que comprende: - al menos un acumulador de energía eléctrica diseñado para alimentar con potencia eléctrica […]