PROCEDIMIENTO PARA EVALUAR UNA SEÑAL DE UN DISPOSITIVO OPTOELECTRONICO DE MEDIDA DE TRAYECTORIA Y DE ANGULO, Y USO DE DICHO PROCEDIMIENTO.
Procedimiento para la evaluación de señales de un dispositivo optoelectrónico para la medida de ángulo o de recorrido,
con un disco codificado que se puede desplazar respecto de una unidad de emisión y recepción que comprende una fuente de luz y una alineación de sensores que contiene numerosos elementos convertidores, con por lo menos una pista de código digital, y a elección, por lo menos una pista de referencia, comprendiendo dicho procedimiento la asignación de por lo menos una pista de código a ciertos elementos convertidores de la alineación de sensores, caracterizado porque para la evaluación de las amplitudes de señal de los elementos convertidores asignados a por lo menos una pista de código, se determina la diferencia relativa de luminosidad entre una señal de pista de código que es relativamente más luminosa cuando está iluminada y una señal de &8220;no pista&8221; relativamente más oscura, y en dependencia de la diferencia de luminosidad detectada, tiene lugar una determinación de si el elemento convertidor asignado a una pista de código está iluminado o no está iluminado por el código
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2001/012394.
Solicitante: LEOPOLD KOSTAL GMBH & CO. KG.
Nacionalidad solicitante: Alemania.
Dirección: WIESENSTRASSE 47, 58507 LUDENSCHEID.
Inventor/es: BLISING, FRANK, SCHIRP, CHRISTIAN.
Fecha de Publicación: .
Fecha Concesión Europea: 23 de Junio de 2010.
Clasificación Internacional de Patentes:
- B62D15/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 15/00 Direcciones no previstas en otro lugar. › Indicadores de dirección.
- G01D5/244R2
Clasificación PCT:
- B62D15/02 B62D 15/00 […] › Indicadores de dirección.
- G01B7/30 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 7/00 Disposiciones de medida caracterizadas por la utilización de medios eléctricos o magnéticos. › para la medida de ángulos o conicidades; para ensayar la alineación de ejes.
- G01D5/244 G01 […] › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › que influyen en las características de pulsos o trenes de pulsos; que generan pulsos o trenes de pulsos.
Clasificación antigua:
Fragmento de la descripción:
La invención se refiere a un procedimiento para la evaluación de señales de un dispositivo optoelectrónico para la medida de ángulo o de recorrido con un disco codificado que se puede desplazar respecto de una unidad de emisión y recepción que comprende una fuente de luz y una alineación de sensores que contiene numerosos elementos convertidores, con por lo menos una pista de código digital, comprendiendo dicho procedimiento la asignación de por lo menos una pista de código a ciertos elementos convertidores de la alineación de sensores. La invención se refiere además a una aplicación preferida de un procedimiento de este tipo.
Los dispositivos de medición de recorrido y de ángulo se utilizan con frecuencia para el posicionamiento y la medición en máquinas herramientas y en aparatos de medición por coordenadas. Los sensores de ángulo de giro sirven por ejemplo en los vehículos automóviles para determinar la posición angular absoluta del volante y por este motivo son conocidos también como sensores de ángulo del volante. Los sensores de ángulo del volante optoelectrónico de este tipo constan esencialmente de un disco codificado acoplado a la rotación del volante como rotor, y de una unidad de emisión y recepción como estator. La unidad de emisión y recepción comprende una fuente de luz situada a un lado del disco codificado, por ejemplo una disposición de diodos LED y en el otro lado del disco codificado, una unidad de recepción que normalmente es un sensor en línea con numerosos elementos convertidores situados uno junto a otro. Como codificación del disco codificado se utiliza un código digital que consta de varias pistas de código paralelas y que por ejemplo está configurado según el modo de un código Gray.
En los vehículos automóviles el ángulo del volante se utiliza para poder influir con este valor un sistema de regulación de la dinámica de la trayectoria. Un sistema de regulación de la dinámica de la trayectoria de este tipo comprende además de los valores de ángulo del volante otras mediciones, como la velocidad de giro de las ruedas o la rotación del vehículo sobre su eje vertical. Se precisan por un lado la posición absoluta del volante y por otro la velocidad del volante, para con estos valores junto con los otros datos captados, evaluarlos mediante el sistema de regulación de la dinámica de la trayectoria y utilizarlos para el mando de actuadores, por ejemplo los frenos y/o la gestión del motor.
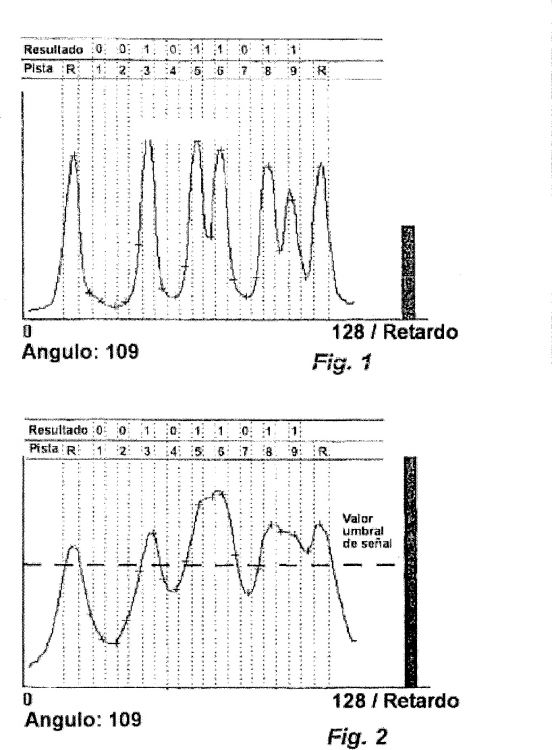
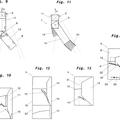
En los dispositivos de medida de ángulo o de recorrido conocidos, la evaluación de las amplitudes de señal del elemento convertidor asignado a cada pista de código, tiene lugar mediante la comparación de la amplitud de señal con un umbral de señal predeterminado. Si se supera el umbral de señal, la amplitud de señal del elemento convertidor asignado a esta pista de código se evalúa como codificación de pista de código iluminada. Si la amplitud de señal es menor que el valor umbral predeterminado, la evaluación indica que la codificación de la pista de código asignada a este elemento convertidor no está iluminada.
En el procedimiento conocido se utiliza una asignación de ciertos elementos convertidores a una pista de código para compensar un juego entre el disco de código en movimiento y la unidad de emisión y recepción. Para este fin, se asocia por lo menos una pista de referencia a la codificación. Puesto que la distancia entre las pistas de código y la pista de referencia es igual a lo largo de toda la longitud de las pistas de código, determinando la posición de la pista de referencia en la alineación de sensores, es posible deducir cuales son los elementos convertidores que pueden estar iluminados por cada pista de código.
Aunque con el procedimiento conocido es posible obtener resultados suficientemente precisos cuando son constantes las condiciones que influyen en la detección de la señal, sin embargo las mediciones de un dispositivo de medición de recorrido y de ángulo de este tipo pueden ser falseadas cuando cambian los parámetros de medición idealizados en la concepción del dispositivo de medición de ángulo o de recorrido, por ejemplo a causa de influencias ambientales. En particular, cuando se utiliza un dispositivo de medición de ángulo de este tipo como sensor de ángulo del volante en un automóvil, se debe garantizar una detección de ángulo exacta bajo distintas influencias. Por ejemplo, pueden influir sobre un dispositivo de medición de este tipo la luz difusa, el empañado o la congelación o también la formación de una capa de polvo sobre el disco codificado, siendo frecuente que en estos casos indicados como ejemplo, se sobrepase el valor umbral no solo cuando se ilumina directamente una pista de código a través del código de una pista de código, sino también cuando el elemento convertidor asignado a esta pista de código recibe luz difusa. De forma correspondiente, en el caso de la formación de una capa de polvo puede ocurrir que no se alcance el valor umbral incluso con la iluminación de una pista de código a través de la codificación. En estos casos el valor de ángulo indicado por un sensor de ángulo es erróneo; en consecuencia las evaluaciones y los análisis realizados con estos valores son a su vez erróneos.
El documento EP 0 911 610 A1 da a conocer un procedimiento según el preámbulo de la reivindicación 1.
Partiendo del estado de la técnica comentado, la invención tiene por objeto desarrollar el procedimiento anterior y descrito al principio, de manera que los inconvenientes explicados sean evitados con la mayor extensión posible
Según la invención, este objeto se consigue de modo que para la evaluación de las amplitudes de señal de los elementos convertidores asignados a una pista de código se determina la diferencia relativa de luminosidad entre una señal de pista de código que es relativamente más luminosa cuando está iluminada y una señal de “no pista” relativamente más oscura, y en dependencia de la diferencia de luminosidad detectada, tiene lugar una determinación de si los elementos convertidores asignados a una pista de código están
iluminados o no están iluminados por el código.
Al contrario que en el estado de la técnica conocido, en el procedimiento según la invención, la evaluación de la amplitud de señal asignada a una pista de código no se efectúa por comparación con un valor umbral absoluto fijo y predeterminado, sino mediante la determinación de la diferencia relativa de luminosidad entre una pista de código relativamente más clara cuando está iluminada y una señal de “no pista” relativamente más oscura respecto a aquella. La evaluación se realiza fundamentalmente con independencia de un valor umbral que tome en cuenta solamente la amplitud de señal absoluta. Así la evaluación de la amplitud de señal es mucho más sensible, de modo que el umbral de decisión puede establecerse a un nivel esencialmente más bajo. De este modo, mediante la evaluación relativa se pueden compensar las influencias ambientales. En el caso de una posible reducción de la intensidad de iluminación, incluso solo local, que incide sobre los elementos convertidores de la alineación de sensores, que por ejemplo, en el estado de la técnica conocido impediría el reconocimiento de la señal, se continúa disponiendo de un contraste detectable entre una pista de código o sección de pista de código que ilumina ciertos elementos convertidores de la alineación de sensores y las secciones de “no pista” no iluminadas por esta pista de código, de modo que la evaluación deseada puede realizarse sin restricciones. La evaluación de la señal de una pista de código se realiza en dependencia de la diferencia de luminosidad determinada entre una señal de pista de código relativamente más clara cuando está iluminada y una señal de “no pista” relativamente más oscura, mediante la determinación de si por lo menos un elemento de código asignado a una pista de código está iluminado o no lo está por el código.
La diferencia de luminosidad entre las amplitudes de señal de una pista de código y de una pista de “no código” puede realizarse por ejemplo considerando la diferencia de estas amplitudes de señal, utilizándose como valor umbral una diferencia de luminosidad predeterminada. Para determinar la diferencia de luminosidad relativa puede preverse también el cálculo de la proporción entre éstas, utilizándose como valor umbral una proporción predeterminada.
Como pista de “no código” relativamente más oscura se puede tomar una...
Reivindicaciones:
1. Procedimiento para la evaluación de señales de un dispositivo optoelectrónico para la medida de ángulo o de recorrido, con un disco codificado que se puede desplazar respecto de una unidad de emisión y recepción que comprende una fuente de luz y una alineación de sensores que contiene numerosos elementos convertidores, con por lo menos una pista de código digital, y a elección, por lo menos una pista de referencia, comprendiendo dicho procedimiento la asignación de por lo menos una pista de código a ciertos elementos convertidores de la alineación de sensores, caracterizado porque para la evaluación de las amplitudes de señal de los elementos convertidores asignados a por lo menos una pista de código, se determina la diferencia relativa de luminosidad entre una señal de pista de código que es relativamente más luminosa cuando está iluminada y una señal de “no pista” relativamente más oscura, y en dependencia de la diferencia de luminosidad detectada, tiene lugar una determinación de si el elemento convertidor asignado a una pista de código está iluminado o no está iluminado por el código.
2. Procedimiento según la reivindicación 1, caracterizado porque la diferencia de luminosidad se determina considerando la diferencia entre las amplitudes de señal de una pista de código y de una pista de “no código”, y para determinar si los elementos convertidores asociados a una pista de código están iluminados o no están iluminados por la codificación se utiliza como valor umbral una diferencia de luminosidad predeterminada.
3. Procedimiento según la reivindicación 1, caracterizado porque la diferencia relativa de luminosidad se determina considerando la proporción entre las amplitudes de señal de los elementos convertidores asignados a una pista de código y a una pista de “no código”, y para determinar si los elementos convertidores asociados a una pista de código están iluminados o no están iluminados por la codificación se utiliza como valor umbral una proporción predeterminada.
4. Procedimiento según una de las reivindicaciones 1 a 3, caracterizado porque para determinar si los elementos convertidores asignados a una pista de código están iluminados o no están iluminados por la codificación, la amplitud de señal de los elementos convertidores asignados a por lo menos una pista de código debe quedar por encima o por debajo de un valor umbral absoluto.
5. Procedimiento según una de las reivindicaciones 2 a 4, caracterizado porque el
valor de señal umbral se adapta a los parámetros de medición variables.
6. Procedimiento según la reivindicación 5, caracterizado porque la adaptación del valor umbral de señal comprende los siguientes pasos:
- Detección de la amplitud de una señal de referencia de por lo menos un elemento convertidor iluminado efectivamente por una pista de código o por una pista de referencia. -Evaluación de la amplitud de la señal de referencia. -Adaptación del valor umbral de señal a partir de la amplitud de la señal de referencia detectada.
7. Procedimiento según la reivindicación 6, caracterizado porque el paso de evaluación de la amplitud de la señal de referencia comprende el cálculo del promedio de un cierto número de pasos de medición, y una adaptación de por lo menos un parámetro relevante para la evaluación de las amplitudes en dependencia del valor medio determinado.
8. Procedimiento según la reivindicación 6 ó 7, caracterizado porque la evaluación de la amplitud de la señal de referencia comprende una comparación con una amplitud de señal de referencia.
9. Procedimiento según una de las reivindicaciones 6 a 8, caracterizado porque, para la adaptación de por lo menos un parámetro relevante para la evaluación de señal, se varía el tiempo de iluminación.
10. Procedimiento según una de las reivindicaciones 6 a 9, caracterizado porque para la adaptación de por lo menos un parámetro relevante para la evaluación de señal, se varía la intensidad de iluminación de la fuente de luz.
11. Procedimiento según una de las reivindicaciones 1 a 10, caracterizado porque para la adaptación de por lo menos un parámetro relevante para la evaluación de señal, se varía el valor umbral que permite distinguir si los elementos convertidores asignados a una pista de código están iluminados o no están iluminados por la codificación.
12. Aplicación de un procedimiento según una de las reivindicaciones 1 a 11 para la evaluación de las señales de un sensor optoelectrónico de ángulo del volante de un vehículo automóvil.
Patentes similares o relacionadas:
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]
Dirección asistida electromecánica, procedimiento para la determinación de un ángulo de giro absoluto y procedimiento para la calibración de un dispositivo de medición para la medición de un ángulo de giro absoluto, del 15 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un automóvil, que comprende • un árbol de dirección que está soportado de forma giratoria alrededor de un eje de giro […]
Sistemas y método de ayuda a la conducción de vehículos, del 19 de Febrero de 2020, de Siemens Mobility S.A.S: Sistema de ayuda a la conduccion de un vehiculo , dicho sistema comprende: un dispositivo de determinacion de trayectoria capaz de determinar una trayectoria para […]
 Sistema de visión para un vehículo, en particular para un vehículo comercial, del 29 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo , con
una unidad de captación para la captación de una zona de visión ;
una unidad de cálculo , que […]
Sistema de visión para un vehículo, en particular para un vehículo comercial, del 29 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo , con
una unidad de captación para la captación de una zona de visión ;
una unidad de cálculo , que […]
Dispositivo de asistencia para maniobras de atraque en una dársena, del 16 de Octubre de 2019, de NEWTL (Société par Actions Simplifiée): Vehículo de carretera que incluye ruedas delanteras montadas en un eje de dirección delantero y ruedas traseras montadas en un eje trasero […]
Procedimiento y dispositivo para adaptar un ángulo de volante de un volante y un ángulo de dirección de ruedas de una dirección de ruedas en un vehículo tras una maniobra de conducción automatizada efectuada, del 12 de Junio de 2019, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para adaptar un ángulo de volante real de un volante y un ángulo de dirección de ruedas real de una dirección de ruedas […]
Sistema de asistencia al conductor, del 11 de Junio de 2019, de ROBERT BOSCH GMBH: Sistema de asistencia al conductor para vehículos a motor, que comprende: - un regulador de guiado longitudinal , el cual está configurado […]
 Procedimiento para aparcar de manera, al menos parcialmente, autónoma un vehículo motorizado en un hueco de aparcamiento con un escalón, sistema de asistencia al conductor y vehículo motorizado, del 29 de Mayo de 2019, de VALEO SCHALTER UND SENSOREN GMBH: Un procedimiento para aparcar un vehículo motorizado de manera, al menos parcialmente, autónoma en hueco de aparcamiento con un escalón detectado […]
Procedimiento para aparcar de manera, al menos parcialmente, autónoma un vehículo motorizado en un hueco de aparcamiento con un escalón, sistema de asistencia al conductor y vehículo motorizado, del 29 de Mayo de 2019, de VALEO SCHALTER UND SENSOREN GMBH: Un procedimiento para aparcar un vehículo motorizado de manera, al menos parcialmente, autónoma en hueco de aparcamiento con un escalón detectado […]