Procedimiento de estimación de un parámetro de un máximo o mínimo local de una función de correlación derivada de una señal recibida.
Un procedimiento de estimación de un parámetro de un máximo o mínimo local de una función derivada a partir de una señal recibida,
realizado en un sistema de GPS usando muestras de la función, incluyendo las muestras un máximo o mínimo local muestreado, comprendiendo el procedimiento:
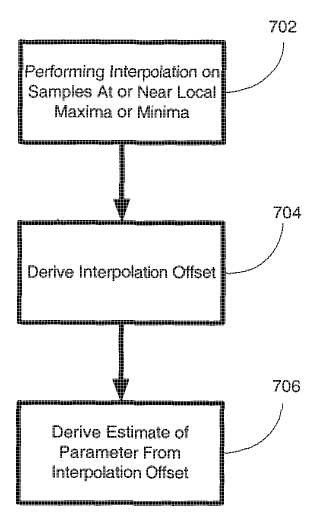
realizar la interpolación (702) sobre las muestras de la función en, o cerca de, un máximo o mínimo 5 local, dando como resultado un máximo o mínimo local interpolado;
derivar (704) un desplazamiento de interpolación que comprende una desviación entre ubicaciones del máximo o mínimo local interpolado y el máximo o mínimo local muestreado; y
derivar (706) una estimación del parámetro a partir del desplazamiento de interpolación, mediante uno entre: derivar un sesgo paramétrico a partir del desplazamiento de interpolación, usando una relación preexistente que esté presente entre el sesgo paramétrico y el desplazamiento de interpolación, y obteniendo luego una estimación del parámetro a partir del sesgo paramétrico, o bien
derivar una estimación del parámetro directamente a partir del desplazamiento de interpolación, usando una relación preexistente que esté presente entre el parámetro y el desplazamiento de interpolación.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2003/033122.
Solicitante: QUALCOMM INCORPORATED.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 5775 MOREHOUSE DRIVE SAN DIEGO, CALIFORNIA 92121 ESTADOS UNIDOS DE AMERICA.
Inventor/es: PATRICK,CHRISTOPHER, ROWITCH,DOUGLAS N.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S1/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › Balizas o sistemas de balizas que transmiten señales que tienen una o más características que pueden ser detectadas por receptores no direccionales y que definen direcciones, posiciones o líneas de posición fijas con relación a los transmisores de las balizas; Receptores asociados a ellas (fijación de la posición mediante la coordinación de una pluralidad de determinaciones de líneas de posición o direcciones G01S 5/00).
- G01S11/06 G01S […] › G01S 11/00 Sistemas para determinar la distancia o la velocidad que no utilizan la reflexión o la rerradiación (establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia G01S 5/00). › que utilizan medidas de intensidad.
- G01S11/10 G01S 11/00 […] › que utilizan el efecto Doppler.
- G01S19/24 G01S […] › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › Adquisición o seguimiento de señales transmitidas por el sistema.
- G01S19/25 G01S 19/00 […] › empleando datos de navegación asistida recibidos de un elemento cooperante, p. ej. GPS asistido.
- G01S19/29 G01S 19/00 […] › relacionado con la portadora.
- G01S19/30 G01S 19/00 […] › relacionado con el código.
- H04B1/707 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04B TRANSMISION. › H04B 1/00 Detalles de los sistemas de transmision, no cubiertos por uno de los grupos H04B 3/00 - H04B 13/00; Detalles de los sistemas de transmisión no caracterizados por el medio utilizado para la transmisión. › que usa modulación en secuencia directa.
- H04B1/7075 H04B 1/00 […] › con código de adquisición de fase.
PDF original: ES-2380665_T3.pdf
Fragmento de la descripción:
Procedimiento de estimación de un parámetro de un máximo o mínimo local de una función de correlación derivada de una señal recibida Solicitudes relacionadas La presente solicitud reivindica prioridad respecto de la Solicitud Provisoria Estadounidense Nº 60 / 419.626, presentada el 17 de octubre de 2002.
Campo de la invención Esta invención se refiere a los campos de determinación de posición, interpolación cuadrática y sistemas de geolocalización por GPS y, más específicamente, a procedimientos para estimar un parámetro, tal como un factor de localización o escala, de un máximo o mínimo local de una función, tal como una función de correlación del GPS.
Técnica relacionada El sistema de geolocalización del GPS es un sistema de satélites que orbitan la Tierra, a partir del cual las entidades visibles para los satélites son capaces de determinar su posición. Cada uno de los satélites transmite una señal marcada con un código repetido de PN (pseudo-ruido) de 1.023 segmentos, que identifica unívocamente al satélite. Los 1.023 segmentos se repiten cada milisegundo. La señal también se modula con bits de datos, donde cada bit de datos tiene una duración de 20 ms en la señal modulada.
Con referencia a la Figura 1, la estación abonada 100 en un sistema de comunicaciones inalámbricas recibe transmisiones desde los satélites 102a, 102b, 102c, 102d del GPS visibles para la estación, y deriva diversas mediciones y valores relacionados a partir de cada una entre cuatro o más de las transmisiones. La estación 100 comunica luego las mediciones y valores a la entidad de determinación de posición (PDE) 104, que estima la ubicación y velocidad de la estación 100 a partir de estas mediciones y valores. Alternativamente, la estación 100 determina su propia posición y velocidad a partir de estas mediciones y valores.
La estación 100 busca una transmisión proveniente de un satélite específico correlacionando el código de PN para el satélite con la señal recibida, que habitualmente es un compuesto de transmisiones desde uno o más de los satélites que son visibles para el receptor de la estación en presencia de ruido. La correlación se realiza habitualmente en dos dimensiones. En la primera dimensión, la dimensión de fase de código, la correlación se realiza sobre una gama de posibles desplazamientos del código de PN, conocida como la ventana W de búsqueda. Cada correlación se realiza sobre un tiempo I de integración que puede expresarse como el producto de Nc y M, donde Nc es el tiempo de integración coherente, y M es el número de integraciones coherentes que están combinadas de forma no coherente. En la segunda dimensión, la dimensión de la frecuencia Doppler, la correlación se realiza sobre una gama de hipótesis de frecuencia Doppler.
Los valores de correlación resultantes definen una función de correlación bidimensional. La función de correlación se muestrea, y los picos de la función de correlación se localizan a lo largo de cada una de las dos dimensiones. Habitualmente, los picos también se comparan con un umbral predeterminado, seleccionado de modo tal que la probabilidad de falsa alarma esté en, o por debajo de, un valor predeterminado. La ubicación del mayor pico en la dimensión de fase de código forma una medición temporal para el satélite. De manera similar, la ubicación del mayor pico en la dimensión de frecuencia Doppler forma una medición de frecuencia Doppler para el satélite. Las mediciones de picos de energía también se derivan de la altura del mayor pico tanto en la dimensión de fase de código como en la de frecuencia Doppler.
Debido a la falta de sincronización con el reloj de muestreo, a menudo hay una divergencia entre las ubicaciones de picos muestreadas y efectivas, en ambas dimensiones de fase de código y de frecuencia Doppler, y entre las alturas de picos muestreadas y efectivas en ambas dimensiones.
La interpolación se aplica a menudo a las muestras de la función de correlación, en un esfuerzo para estimar más precisamente las ubicaciones y alturas de los picos efectivos. En la interpolación cuadrática, por ejemplo, se ajusta una función cuadrática a tres muestras de la función de correlación. El pico de la función cuadrática a menudo es una estimación más precisa del pico efectivo que el pico muestreado.
Sin embargo, la forma de una función de correlación del GPS, en cualquiera de las dimensiones de fase de código o de frecuencia Doppler, raramente se parece a una función cuadrática. La forma efectiva del pulso de correlación dependerá del filtrado exacto usado en la cadena receptora del receptor y de los parámetros de búsqueda Nc y M. En consecuencia, las ubicaciones de picos interpoladas y efectivas divergirán a menudo entre sí, como lo harán las alturas de picos interpoladas y efectivas.
La Figura 2 ilustra un pulso 202 de una función de correlación del GPS en la dimensión de fase de código. La forma de este pulso específico corresponde a un conjunto específico de filtros y a un valor del parámetro Nc igual a 20 ms. El pico de este pulso está situado en los 0 segmentos, y la altura en términos normalizados es 1. Una primera función cuadrática 206 se ajusta a las muestras 204b, 204d y 204f del pulso 202. Una segunda función cuadrática 208 se ajusta a las muestras 204a, 204c y 204e del pulso 202. Tanto la ubicación 210 del pico de la primera función cuadrática 206 como la ubicación 212 del pico de la segunda función cuadrática 208 se desvían de la ubicación del verdadero pico (0 segmentos) . De manera similar, tanto la altura 214 del pico de la primera función cuadrática 206 como la altura 216 de la segunda función cuadrática 208 se desvían de la altura del verdadero pico (1 en términos normalizados) .
En consecuencia, las estimaciones de posición y velocidad derivadas de ubicaciones y alturas de picos interpoladas a menudo serán erróneas. El error en la ubicación del pico de la función de correlación en la dimensión de fase de código puede dar origen a un error significativo en la estimación de posición. En el ejemplo específico ilustrado en la Figura 2, el error en la ubicación del pico da origen a un error de + 15 m en la estimación de posición.
Además, los procedimientos de interpolación actualmente disponibles, que brindan más precisión que la interpolación cuadrática, son caros y consumen mucho tiempo y, por lo tanto, son menos adecuados para dispositivos electrónicos de consumo del mercado masivo, tal como los equipos inalámbricos de mano.
El documento US 6.201.828 B1 describe la estimación fina de retardos de multitrayecto en señales de espectro ensanchado. Se describe un sistema para refinar una estimación inicial del retardo y para rastrear el retardo durante una comunicación en marcha, correlacionando la señal en el retardo estimado, un incremento antes del retardo estimado, y el mismo incremento posterior al retardo estimado, e interpolando las correlaciones temprana y tardía, normalizadas por la correlación en el retardo estimado y por el incremento, para determinar una estimación refinada del retardo.
Resumen de la invención Un aspecto de la invención proporciona un procedimiento de estimación de un parámetro de un máximo o mínimo local de una función derivada de una señal recibida, llevado a cabo en un sistema de GPS según la reivindicación 1.
En una realización, la función es una función de correlación bidimensional, con una dimensión de fase de código y una dimensión de frecuencia Doppler. El parámetro que se busca determinar es la ubicación o factor de escala de un pico de la función de correlación a lo largo de una de las dos dimensiones. Una función cuadrática se ajusta a una pluralidad de muestras de la función de correlación en o cerca del pico, y el pico de la función cuadrática se determina luego.
Se deriva luego un desplazamiento de interpolación, igual a la diferencia entre la ubicación del pico de la función cuadrática y la ubicación del pico muestreado. Un parámetro del pico, tal como su ubicación o altura, se determina luego a partir del desplazamiento de interpolación.
En una implementación, un sesgo paramétrico tiene una relación preexistente con el desplazamiento de interpolación. En esta implementación, la estimación paramétrica se deriva usando un proceso en dos etapas. Primero, se deriva el sesgo paramétrico correspondiente al desplazamiento de interpolación, usando la relación preexistente. Luego, se deriva una estimación del parámetro... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento de estimación de un parámetro de un máximo o mínimo local de una función derivada a partir de una señal recibida, realizado en un sistema de GPS usando muestras de la función, incluyendo las muestras un máximo o mínimo local muestreado, comprendiendo el procedimiento:
realizar la interpolación (702) sobre las muestras de la función en, o cerca de, un máximo o mínimo local, dando como resultado un máximo o mínimo local interpolado;
derivar (704) un desplazamiento de interpolación que comprende una desviación entre ubicaciones del máximo o mínimo local interpolado y el máximo o mínimo local muestreado; y derivar (706) una estimación del parámetro a partir del desplazamiento de interpolación, mediante uno entre:
derivar un sesgo paramétrico a partir del desplazamiento de interpolación, usando una relación preexistente que esté presente entre el sesgo paramétrico y el desplazamiento de interpolación, y obteniendo luego una estimación del parámetro a partir del sesgo paramétrico, o bien derivar una estimación del parámetro directamente a partir del desplazamiento de interpolación, usando una relación preexistente que esté presente entre el parámetro y el desplazamiento de interpolación.
2. El procedimiento de la reivindicación 1, en el cual la función es una función de correlación.
3. El procedimiento de la reivindicación 2, en el cual la función de correlación se deriva de una señal recibida en el sistema del GPS.
4. El procedimiento de la reivindicación 1, en el cual el sistema del GPS comprende una señal de fase de código y el desplazamiento de interpolación comprende una desviación entre ubicaciones de picos interpolados y muestreados a lo largo de una dimensión de fase de código.
5. El procedimiento de la reivindicación 4, en el cual el sesgo paramétrico es un sesgo de fase de código.
6. El procedimiento de la reivindicación 5, en el cual el parámetro que se estima es la ubicación de un pico a lo largo de la dimensión de fase de código, y una estimación de este parámetro se deriva del sesgo de fase de código.
7. El procedimiento de la reivindicación 1, en el cual el sistema del GPS comprende una señal de frecuencia Doppler y el desplazamiento de interpolación comprende una desviación entre ubicaciones de picos interpolados y muestreados a lo largo de una dimensión de frecuencia Doppler.
8. El procedimiento de la reivindicación 7, en el cual el sesgo paramétrico es un sesgo de frecuencia Doppler.
9. El procedimiento de la reivindicación 8, en el cual el parámetro que se estima es la ubicación de un pico de la función a lo largo de la dimensión de frecuencia Doppler, y una estimación de este parámetro se deriva del sesgo de frecuencia Doppler.
10. El procedimiento de la reivindicación 4 o la reivindicación 8, en el cual el sesgo paramétrico es un sesgo de energía de pico.
11. El procedimiento de la reivindicación 10, en el cual el parámetro que se estima es la energía del pico, y una estimación de este parámetro se deriva del sesgo de energía de pico.
12. El procedimiento de la reivindicación 1, en el cual la relación preexistente entre el desplazamiento de interpolación y el sesgo paramétrico se realiza como una tabla de búsqueda.
13. El procedimiento de la reivindicación 1, en el cual la segunda etapa de derivación comprende derivar directamente una estimación del parámetro a partir del desplazamiento de interpolación, mediante un acceso a una tabla de búsqueda.
14. Una memoria (1704) configurada para ser usada en el procedimiento de cualquiera de las reivindicaciones 1 a 13, que realiza tangiblemente una tabla de búsqueda adaptada para ser usada en un sistema de GPS, implementando la tabla de búsqueda la relación preexistente entre un desplazamiento de interpolación y un sesgo paramétrico o estimación paramétrica, y comprendiendo el desplazamiento de interpolación una desviación entre ubicaciones de máximos o mínimos locales interpolados y muestreados de una función derivada a partir de una señal recibida.
15. La memoria de la reivindicación 14, en el cual la función es una función de correlación.
16. La memoria de la reivindicación 15, en el cual la función de correlación se deriva a partir de una señal recibida en el
sistema del GPS.
17. La memoria de la reivindicación 15, en la cual un acceso a la tabla de búsqueda produce un sesgo paramétrico.
18. La memoria de la reivindicación 15, en la cual un acceso a la tabla de búsqueda produce una estimación paramétrica.
19. La memoria de la reivindicación 17, en la cual un sistema del GPS comprende una señal de fase de código y el desplazamiento de interpolación comprende una desviación entre ubicaciones de picos interpolados y muestreados a lo largo de una dimensión de fase de código.
20. La memoria de la reivindicación 19, en la cual el sesgo paramétrico es un sesgo de fase de código.
21. La memoria de la reivindicación 20, en la cual la estimación paramétrica es una estimación de la ubicación de un pico a lo largo de una dimensión de fase de código.
22. La memoria de la reivindicación 21, en la cual la estimación paramétrica comprende una suma del desplazamiento de interpolación y del sesgo de fase de código.
23. La memoria de la reivindicación 19, en la cual el sesgo paramétrico es un sesgo de energía de pico.
24. La memoria de la reivindicación 23, en la cual la estimación paramétrica es una estimación de energía de pico.
25. La memoria de la reivindicación 24, en la cual la estimación paramétrica comprende una suma de energía de pico interpolado y un sesgo de energía de pico.
26. La memoria de la reivindicación 24, en la cual la estimación paramétrica comprende una suma de energía de pico muestreado y un sesgo de energía de pico.
27. La memoria de la reivindicación 17, en la cual el sistema del GPS comprende una señal de frecuencia Doppler y el desplazamiento de interpolación comprende una desviación entre ubicaciones de picos interpolados y muestreados a lo largo de una dimensión de frecuencia Doppler.
28. La memoria de la reivindicación 27, en la cual el sesgo paramétrico es un depósito de frecuencia Doppler.
29. La memoria de la reivindicación 28, en la cual la estimación paramétrica es una estimación de la ubicación de un pico a lo largo de una dimensión de frecuencia Doppler.
30. La memoria de la reivindicación 29, en la cual la estimación paramétrica comprende una suma del desplazamiento de interpolación y un sesgo de frecuencia Doppler.
31. La memoria de la reivindicación 27, en la cual el sesgo paramétrico es un sesgo de energía de pico.
32. La memoria de la reivindicación 31, en la cual la estimación paramétrica es una estimación de energía de pico.
33. La memoria de la reivindicación 32, en la cual la estimación comprende una suma de la energía del pico interpolado y el sesgo de energía de pico.
34. La memoria de la reivindicación 32, en la cual la estimación comprende una suma de la energía del pico muestreado y un sesgo de energía de pico.
35. Un sistema de GPS que comprende un procesador y la memoria de la reivindicación 14, en el cual el procesador está configurado para acceder a la tabla de búsqueda tangiblemente realizada por la memoria.
36. Una memoria (1704) que realiza tangiblemente una secuencia de instrucciones de software configurada para realizar un procedimiento de estimación de un parámetro de un máximo o mínimo local de una función derivada a partir de una señal recibida en un sistema del GPS, usando muestras de la función, incluyendo las muestras un máximo o mínimo local muestreado, comprendiendo el procedimiento:
realizar la interpolación (702) sobre muestras de la función en, o cerca de, un máximo o mínimo local, dando como resultado un máximo o mínimo local interpolado;
derivar (704) un desplazamiento de interpolación que comprende una desviación entre ubicaciones del máximo o mínimo local interpolado y un máximo o mínimo local muestreado; y derivar (706) una estimación del parámetro a partir del desplazamiento de interpolación, mediante uno entre:
derivar un sesgo paramétrico a partir del desplazamiento de interpolación, usando una relación preexistente que esté presente entre el sesgo paramétrico y el desplazamiento de interpolación, y obteniendo luego una estimación del parámetro a partir del sesgo paramétrico, o bien derivar una estimación del parámetro directamente a partir del desplazamiento de interpolación, usando una relación preexistente que esté presente entre el parámetro y el desplazamiento de interpolación.
37. La memoria de la reivindicación 36, en la cual la función es una función de correlación.
38. La memoria de la reivindicación 37, en la cual la función de correlación se deriva a partir de una señal recibida en el sistema del GPS.
39. La memoria de la reivindicación 36, en la cual el sistema del GPS comprende una señal de fase de código y el desplazamiento de interpolación comprende una desviación entre ubicaciones de picos interpolados y muestreados a lo largo de una dimensión de fase de código.
40. La memoria de la reivindicación 39, en el cual el sesgo paramétrico es un sesgo de fase de código.
41. La memoria de la reivindicación 40, en la cual el parámetro es la ubicación de un pico a lo largo de la dimensión de fase de código, y una estimación de este parámetro se deriva a partir del sesgo de fase de código.
42. La memoria de la reivindicación 36, en la cual el sistema del GPS comprende una señal de frecuencia Doppler y el desplazamiento de interpolación comprende una desviación entre ubicaciones de picos interpolados y muestreados a lo largo de una dimensión de frecuencia Doppler.
43. La memoria de la reivindicación 42, en la cual el sesgo paramétrico es un sesgo de frecuencia Doppler.
44. La memoria de la reivindicación 43, en la cual el parámetro que se estima es la ubicación de un pico de la función a lo largo de la dimensión de frecuencia Doppler, y una estimación de este parámetro se deriva del sesgo de frecuencia Doppler.
45. La memoria de la reivindicación 42, en la cual el sesgo paramétrico es un sesgo de energía de pico.
46. La memoria de la reivindicación 45, en la cual el parámetro que se estima es la energía del pico, y una estimación de este parámetro se deriva del sesgo de energía de pico.
47. La memoria de la reivindicación 42, en la cual el sesgo paramétrico es un sesgo de energía de pico
48. La memoria de la reivindicación 47, en la cual el parámetro que se estima es la energía del pico, y una estimación de este parámetro se deriva del sesgo de energía de pico.
49. La memoria de la reivindicación 36, en la cual la relación preexistente entre el desplazamiento de interpolación y el sesgo paramétrico se realiza como una tabla de búsqueda.
50. Un sistema GPS que comprende un procesador (1702) y la memoria (1704) de la reivindicación 36, en el que el procesador (1702) está configurado para acceder a, y ejecutar, la secuencia de instrucciones de software implementadas tangiblemente por la memoria (1704) .
Patentes similares o relacionadas:
Aparato de estación móvil de comunicación por radio y procedimiento de comunicación por radio, del 20 de Mayo de 2020, de OPTIS WIRELESS TECHNOLOGY, LLC: Un aparato de estación móvil que comprende: una sección de recepción por radio configurada para recibir una señal de control procedente de una estación base; una unidad […]
Aparato, método y producto de programa informático que proporciona multiplexación para canal de control de datos no asociados, del 22 de Abril de 2020, de Nokia Technologies OY: Un método para multiplexación de señalización de control de datos no asociados de enlace ascendente, que comprende: usar un desplazamiento cíclico de una secuencia predeterminada […]
 Módulo para controlar la compatibilidad electromagnética dentro de una señal cdma recibida por un receptor de datos cdma, del 25 de Marzo de 2020, de ALSTOM Transport Technologies: Modulo para verificar la compatibilidad electromagnetica dentro de una senal CDMA recibida por un receptor de datos CDMA ,
la senal CDMA recibida que comprende […]
Módulo para controlar la compatibilidad electromagnética dentro de una señal cdma recibida por un receptor de datos cdma, del 25 de Marzo de 2020, de ALSTOM Transport Technologies: Modulo para verificar la compatibilidad electromagnetica dentro de una senal CDMA recibida por un receptor de datos CDMA ,
la senal CDMA recibida que comprende […]
Sistema de comunicación, estación de telefonía móvil, estación base, método de decisión de respuesta, método de decisión de configuración de los recursos y programa, del 22 de Enero de 2020, de NEC CORPORATION: Un sistema de comunicaciones, que comprende una estación base y estaciones de telefonía móvil , en el que dicha estación base recibe un preámbulo a través […]
Asignación de canales de control, del 4 de Diciembre de 2019, de PANASONIC CORPORATION: Un aparato de estación base, que comprende: una unidad de asignación configurada para asignar un canal de control a uno o más elementos […]
Espacio de búsqueda basado en un tamaño de agregación de elementos de canal de control, del 4 de Diciembre de 2019, de OPTIS WIRELESS TECHNOLOGY, LLC: Un circuito integrado para una estación móvil , que comprende: un decodificador configurado para decodificar un canal de control de enlace […]
Métodos, aparatos y sistema para la comunicación de espectro ensanchado asíncrona, del 23 de Octubre de 2019, de AGENCE SPATIALE EUROPEENNE: Un método de recepción de paquetes de datos transmitidos de forma asíncrona por una serie de terminales de usuario (ST) utilizando un protocolo de acceso al medio Aloha ensanchado, […]
Señalización de información de potencia para transmisión MIMO en un sistema de comunicación inalámbrica, del 2 de Octubre de 2019, de QUALCOMM INCORPORATED: Un aparato de comunicación inalámbrica, que comprende: medios para determinar información de potencia indicativa de la potencia total para […]