Procedimiento y dispositivo para la especificación de un límite de corredor alrededor de un corredor que establece un área de permanencia y programa informático para la realización del procedimiento.
Procedimiento para la especificación de al menos un límite de corredor (U),
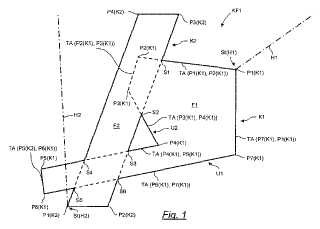
que separa al menos un corredor(KF), en particular una vía marítima, que establece un área de permanencia, en particular admisible, para unvehículo, de al menos un área de entorno, en particular inadmisible, en el que el corredor (KF) comprende variassubáreas (F) que se solapan entre sí al menos parcialmente por parejas y en el que el límite de corredor (U) presentalímites de subárea (K) que limitan segmentos de límite de subárea (TA) de estas subáreas (F),
caracterizado por
las siguientes etapas de procedimiento para la especificación del límite de corredor (U):
1.1) determinar al menos una intersección (S), en particular al menos dos puntos de intersección, en cadacaso de al menos un límite de subárea (K) de al menos una subárea (F) con en cada caso al menos otrolímite de subárea (K) de al menos otra subárea (F),
1.2) especificar los segmentos del límite de subárea (K) respectivo limitados por la intersección (S) respectiva,en particular por los puntos de intersección, como los segmentos de límite de subárea (TA) respectivosasí como, en el caso de que para al menos un límite de subárea (K) no se haya determinado ninguna intersección (S), especificar este límite de subárea (K) respectivo como segmento de límite de subárea(TA) respectivo,
1.3) determinar si estos segmentos de límite de subárea (TA) respectivos se encuentran fuera o dentro dela otra subárea (F) en cada caso, y
1.4) especificar el límite de corredor (U) a partir de los segmentos, que se encuentran fuera de cada unade las demás subáreas (F) en cada caso, de estos segmentos de límite de subárea (TA) determinadoscomo que se encuentran fuera de al menos otra subárea (F) en cada caso.
1.5) en el que
a) para cada subárea (F) del corredor (KF) se calculan segmentos de límite de subárea (TA), quehan de rechazarse, del límite de subárea (K) de esta subárea (F) respectiva, con respecto a cadasubárea (F) del corredor (KF) que se solapa con esta subárea (F) respectiva,
b) se produce una modificación del corredor (KF) mediante la retirada de al menos una subárea (F)de las subáreas (F) ya comprendidos por el corredor (KF) antes de esta modificación, no calculándosede nuevo los segmentos de límite de subárea (TA), que han de rechazarse, de los límites desubárea (K), con respecto a subáreas (F) que tras esta modificación todavía están comprendidaspor el corredor (KF), y
c) el límite de corredor (U) se obtiene a partir de los límites de subárea (K) de todas las subáreas(F) del corredor (KF) todavía comprendidas por el corredor (KF) tras esta modificación menos todoslos segmentos que han de rechazarse al menos una vez de todos estos límites de subárea (K),y se visualiza en un aparato de visualización.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10400036.
Solicitante: ATLAS ELEKTRONIK GMBH.
Nacionalidad solicitante: Alemania.
Dirección: SEBALDSBRUCKER HEERSTRASSE 235 28305 BREMEN ALEMANIA.
Inventor/es: SIMON,DETLEF.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C21/20 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 21/00 Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968). › Instrumentos para efectuar cálculos de navegación (G01C 21/24, G01C 21/26 tienen preferencia).
PDF original: ES-2424886_T3.pdf
Fragmento de la descripción:
Procedimiento y dispositivo para la especificación de un límite de corredor alrededor de un corredor que establece un área de permanencia y programa informático para la realización del procedimiento La invención se refiere a un procedimiento y a un dispositivo para la especificación de al menos un límite de corredor que limita al menos un corredor, en particular una vía marítima, en el que el corredor establece un área de permanencia para un vehículo y por ejemplo se especifica alrededor de un trayecto predeterminado para una embarcación. La invención se refiere además a un programa informático para la realización del procedimiento.
El corredor señala un área de permanencia, en particular admisible, dentro de la cual son admisibles desviaciones del trayecto predeterminado para la embarcación. En general, además, el corredor puede definir también un área de maniobra para una embarcación.
En general, el corredor o una parte del corredor se visualiza en una superficie gráfica que se encuentra por ejemplo en un puesto de mando de la embarcación que pasa de manera admisible por el trayecto predeterminado. Por el contrario, en general el trayecto en sí y/o el corredor se predeterminan desde fuera, por ejemplo desde un puesto de mando naval, donde igualmente el corredor puede representarse gráficamente.
Si una embarcación abandona el corredor predeterminado, en general se genera una señal de alarma que se proporciona al puesto de mando de la embarcación, por ejemplo a un puente, y/o al puesto de mando naval. El puesto respectivo puede entonces decidir cómo hay que manejar la situación.
En un procedimiento conocido para la especificación de un corredor se define este corredor como un rectángulo desplazable alrededor de una posición teórica, admisible en el momento correspondiente, de la embarcación. Este rectángulo y por consiguiente también un límite de corredor se desplaza en el tiempo a lo largo del trayecto con una velocidad predeterminada constante o variable.
El trayecto está definido normalmente por medio de puntos de trayectoria mediante secciones dispuestas en fila una tras otra, que unen en línea recta estos puntos de trayectoria. Por consiguiente, en los puntos de trayectoria puede modificarse el rumbo del trayecto. En una modificación del rumbo de este tipo, el área de permanencia teórica pivota, o igualmente el rectángulo, de modo que en el caso de este procedimiento conocido se produce repentinamente una modificación del área de permanencia admisible. Por tanto puede pasar que la embarcación se encuentre en una posición inoportuna dentro de esta área de permanencia antes del pivotamiento del área de permanencia de tal manera que después del pivotamiento del área de permanencia ya no se encuentre dentro de esta área de permanencia y por consiguiente dado el caso se dispare una alarma o alarma de fallo.
Se conoce otro procedimiento para la especificación de un corredor a partir del documento US 7.043.361 B1. En este procedimiento conocido, el área de permanencia admisible se define igualmente en su mayor parte por medio de rectángulos, definiéndose sin embargo en el área de los puntos de trayectoria mencionados anteriormente un área de permanencia admisible mediante dos rectángulos y un área intermedia entre estos que está limitada por un arco que une los rectángulos. Es cierto que este otro procedimiento puede evitar, con respecto al procedimiento mencionado al principio, alarmas de fallo debido a un abatimiento de áreas de permanencia permitidas. Sin embargo, este procedimiento conocido exige un gran esfuerzo de cálculo.
De la revista Transactions on Graphics, ACM, EE.UU., volumen 17, n.o 2, abril de 1988, páginas 71 a 83, se conoce un artículo con el título “Efficient clipping of arbitrar y polygons” de Günther Greiner y Kai Hormann, en el que se describe un procedimiento para intersecar polígonos entre sí y formar a partir de ello un conjunto intersección, un conjunto diferencia o un conjunto unión. En este sentido el procedimiento se sirve de un algoritmo para detectar si un punto se encuentra dentro o fuera de un polígono. En cuanto a este algoritmo, el artículo remite a una denominada regla par-impar o even-odd-rule que se da a conocer en una publicación con el título “Computer Graphics – Principles and Practice”, 1 de julio de 1995, Addison-Wesley. En esta publicación se describe trazar una línea partiendo de un punto y, mediante los puntos de intersección de esta línea con un polígono, establecer si el número de los puntos de intersección es par o impar, y a través de ello establecer si el punto se encuentra dentro o fuera del polígono.
Además está publicado en la revista Computers and Graphics, GB, vol. 24, n.o 6, 1 de diciembre de 2000 (01/12/2000) , páginas 881-896, un artículo de Rivero M et al. con el título “Boolean operations on general planar polygons”, en el que se determina el conjunto unión de dos polígonos a partir del conjunto unión de todos los bordes descontando los bordes interiores de ambos polígonos.
La invención se basa en el objetivo de poner a disposición otro procedimiento robusto y sencillo de implementar así como que requiera una baja capacidad de cálculo para la especificación un límite de corredor que limita un corredor, en particular para embarcaciones.
La invención soluciona este objetivo con el procedimiento según la reivindicación 1 con un dispositivo según la reivindicación 11, así como con un programa informático según la reivindicación 14.
En particular la invención ha reconocido que el límite de corredor de un corredor que establece el área de permanencia admisible, que comprende varias subáreas que se solapan entre sí al menos parcialmente puede componerse con poco esfuerzo de cálculo a partir de segmentos seleccionados de estos límites de subárea que limitan subáreas, concretamente a partir de justamente los segmentos que representan una transición entre un área de permanencia y el entorno. Por tanto, para la representación del límite de corredor como envolvente del corredor basta con indicar este límite de corredor o envolvente como conjunto de segmentos de los límites de subárea o como conjunto de subcurvas o subsuperficies no necesariamente cerradas. Por consiguiente no tiene que recurrirse a todos los segmentos de los límites de subárea ni a los límites de subárea completos para la descripción del límite de corredor. Ya no se necesitan intersecciones intermedias de las subáreas individuales entre sí para la especificación en última instancia del límite de corredor. Por tanto, por medio de la invención, pueden evitarse por lo demás problemas de redondeo que aparezcan eventualmente. Finalmente, del límite de corredor puede deducirse la ubicación del corredor, ya que para cada segmento al que se recurre para la formación del límite de corredor es conocido y puede representarse gráficamente qué lado apunta hacia el corredor y qué lado hacia el entorno.
Preferiblemente el área de permanencia es un área de permanencia permitida para un vehículo, siendo el entorno un área inadmisible. Sin embargo, alternativamente el corredor también puede definir, justamente al revés, un área inadmisible con respecto al entorno como área de permanencia admisible.
El corredor es una superficie bidimensional o un espacio tridimensional. La invención está o bien configurada de tal manera que especifica y visualiza un límite de corredor alrededor de un corredor bidimensional, o bien configurada de tal manera que especifica y visualiza un límite de corredor alrededor de un corredor tridimensional. Dado el caso también es posible por medio de la invención la especificación del límite de corredor alrededor del corredor bi y tridimensional.
Preferiblemente el corredor es una vía marítima bidimensional para barcos, en particular en una superficie del agua. Alternativamente el corredor es una vía marítima, en particular tridimensional, en particular para submarinos, discurriendo esta vía marítima al menos parcialmente por debajo de la superficie del agua.
En otra alternativa el corredor es una vía aérea, en particular para aviones. Finalmente el corredor también puede ser una vía terrestre o un área por encima o por debajo de la superficie de la tierra, por ejemplo definida como túnel. También es posible una combinación de estas vías.
En concreto la invención presenta varias etapas de procedimiento esenciales que preferiblemente se realizan por medio de un programa informático en una unidad de cálculo o por medio de esta unidad de cálculo. Según una etapa de procedimiento 1.1) se determina al menos una intersección de al menos un límite de... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la especificación de al menos un límite de corredor (U) , que separa al menos un corredor (KF) , en particular una vía marítima, que establece un área de permanencia, en particular admisible, para un vehículo, de al menos un área de entorno, en particular inadmisible, en el que el corredor (KF) comprende varias subáreas (F) que se solapan entre sí al menos parcialmente por parejas y en el que el límite de corredor (U) presenta límites de subárea (K) que limitan segmentos de límite de subárea (TA) de estas subáreas (F) ,
caracterizado por
las siguientes etapas de procedimiento para la especificación del límite de corredor (U) :
1.1) determinar al menos una intersección (S) , en particular al menos dos puntos de intersección, en cada caso de al menos un límite de subárea (K) de al menos una subárea (F) con en cada caso al menos otro límite de subárea (K) de al menos otra subárea (F) ,
1.2) especificar los segmentos del límite de subárea (K) respectivo limitados por la intersección (S) respectiva, en particular por los puntos de intersección, como los segmentos de límite de subárea (TA) respectivos así como, en el caso de que para al menos un límite de subárea (K) no se haya determinado ninguna intersección (S) , especificar este límite de subárea (K) respectivo como segmento de límite de subárea (TA) respectivo,
1.3) determinar si estos segmentos de límite de subárea (TA) respectivos se encuentran fuera o dentro de la otra subárea (F) en cada caso, y
1.4) especificar el límite de corredor (U) a partir de los segmentos, que se encuentran fuera de cada una de las demás subáreas (F) en cada caso, de estos segmentos de límite de subárea (TA) determinados como que se encuentran fuera de al menos otra subárea (F) en cada caso.
1.5) en el que a) para cada subárea (F) del corredor (KF) se calculan segmentos de límite de subárea (TA) , que han de rechazarse, del límite de subárea (K) de esta subárea (F) respectiva, con respecto a cada subárea (F) del corredor (KF) que se solapa con esta subárea (F) respectiva,
b) se produce una modificación del corredor (KF) mediante la retirada de al menos una subárea (F) de las subáreas (F) ya comprendidos por el corredor (KF) antes de esta modificación, no calculándose de nuevo los segmentos de límite de subárea (TA) , que han de rechazarse, de los límites de subárea (K) , con respecto a subáreas (F) que tras esta modificación todavía están comprendidas por el corredor (KF) , y
c) el límite de corredor (U) se obtiene a partir de los límites de subárea (K) de todas las subáreas (F) del corredor (KF) todavía comprendidas por el corredor (KF) tras esta modificación menos todos los segmentos que han de rechazarse al menos una vez de todos estos límites de subárea (K) , y se visualiza en un aparato de visualización.
2. Procedimiento según la reivindicación 1,
caracterizado porque el límite de subárea (K) de cada subárea (F) en cada caso no interseca consigo mismo y la etapa de procedimiento 1.3) presenta las siguientes etapas de procedimiento:
2.1) especificar para en cada caso al menos un segmento de límite de subárea (TA) limitado por la intersección (S) , en particular por los puntos de intersección, si este segmento de límite de subárea (TA) se encuentra fuera o dentro de la otra subárea (F) en cada caso, y
2.2) especificar en cada caso otros, en particular todos los otros, segmentos de límite de subárea (TA) limitados por la intersección (S) partiendo de este segmento de límite de subárea (TA) especificado como que se encuentra fuera o dentro de la otra subárea (F) en cada caso, de manera alterna como que se encuentra fuera o dentro de la otra subárea (F) en cada caso.
3. Procedimiento según la reivindicación 1 ó 2,
caracterizado porque la etapa de procedimiento 1.3) presenta las siguientes etapas de procedimiento: 3.1) especificar una semirrecta (H) que parte de un punto de inicio (St) como parte de una recta que interseca con un segmento de límite de subárea (TA) del límite de subárea (K) , siendo el punto de intersección de esta recta con el límite de subárea (K) el punto de inicio (St) de la semirrecta (H) ,
3.2) determinar el número de puntos de intersección de esta semirrecta (H) con el otro límite de subárea
(K) en cada caso y 3.3) especificar este segmento de límite de subárea (TA) como que se encuentra fuera de la otra subárea
(F) en cada caso, en el caso de que el número de puntos de intersección sea par o nulo, y como que se encuentra dentro de la otra subárea (F) en cada caso, en el caso de que el número de estos puntos de intersección sea impar.
4. Procedimiento según la reivindicación 3,
caracterizado porque la etapa de procedimiento 3.1) presenta las siguientes etapas de procedimiento:
4.1) determinar si un punto del límite de subárea (K) elegido como punto de inicio (St) de una semirrecta se encuentra sobre el otro límite de subárea (K) en cada caso, y
4.2) especificar otro punto del límite de subárea (K) como punto de inicio (St) en el caso de que se haya determinado que este punto elegido se encuentra sobre el otro límite de subárea (K) en cada caso.
5. Procedimiento según la reivindicación 3 ó 4,
caracterizado porque el límite de subárea (K) de cada subárea (F) es en cada caso un polígono o poliedro cerrado y viene dado mediante vértices (P) que se presentan en forma de coordenadas, en particular vértices de polígono o vértices de poliedro, que se encuentran sobre lados (Sg) , en particular rectas laterales o superficies laterales, de la subárea y
la etapa de procedimiento 3.1. presenta la siguiente etapa de procedimiento:
5.1) especificar una dirección de la semirrecta (H) de tal modo que esta dirección se desvíe, en particular lo más posible, preferiblemente al máximo, de las direcciones de todos los lados (Sg) de las subáreas (F) .
6. Procedimiento según una de las reivindicaciones anteriores,
caracterizado porque a la etapa de procedimiento 1.1) le preceden las siguientes etapas de procedimiento:
6.1) determinar si los límites de subárea (K) se tocan entre sí en al menos un punto de una de las subáreas (F) , que en particular no es ningún punto de intersección (S) de estos límites de subárea (K) , y
6.2) desplazar al menos una de las subáreas (F) con respecto a la otra subárea (F) en cada caso, en el caso de que se haya determinado que los límites de subárea (K) se tocan en este punto, hasta que estos límites de subárea (K) no se toquen más.
7. Procedimiento según la reivindicación 6,
caracterizado porque el límite de subárea (K) de cada subárea (F) es en cada caso un polígono o poliedro cerrado y viene dado mediante vértices (P) que se presentan en forma de coordenadas, en particular vértices de polígono o vértices de poliedro, que se encuentran sobre lados (Sg) , en particular rectas laterales o superficies laterales, de la subárea y
la etapa de procedimiento 6.2) presenta las siguientes etapas de procedimiento:
7.1) especificar un vector de desplazamiento para desplazar la subárea (TA) respectiva de tal modo que la dirección del vector de desplazamiento se desvíe de las direcciones de todos los lados (Sg) de la otra subárea (F) en cada caso, preferiblemente en la mayor medida posible, en particular al máximo, y
7.2) desplazar las coordenadas de los vértices (P) de la subárea (TA) según este vector de desplazamiento.
8. Procedimiento según una de las reivindicaciones 4 ó 5
caracterizado porque el límite de subárea (K) de cada subárea (F) es en cada caso un polígono o poliedro cerrado y viene dado mediante vértices (P) que se presentan en forma de coordenadas, en particular vértices de polígono o vértices de poliedro, que se encuentran sobre lados (Sg) , en particular rectas laterales o superficies laterales, de la subárea y
la etapa de procedimiento 4.1) presenta las siguientes etapas de procedimiento:
8.1) especificar la distancia del punto (St, P) con respecto a cada lado (Sg) que presenta un segmento de límite de subárea (TA) del otro límite de subárea (K) en cada caso y
8.2) especificar el punto (St, P) como que se encuentra sobre el otro segmento de límite de subárea (TA) respectivo y/o especificar el segmento de límite de subárea (TA) que presenta este punto (St, P) como que toca a éste otro segmento de límite de subárea (TA) cuando la distancia especificada con respecto a la recta lateral (Sg) que presenta este otro segmento de límite de subárea (TA) es menor que una distancia máxima predeterminada.
9. Procedimiento según una de las reivindicaciones 6 ó 7,
caracterizado porque el límite de subárea (K) de cada subárea (F) es en cada caso un polígono o poliedro cerrado y viene dado mediante vértices (P) que se presentan en forma de coordenadas, en particular vértices de polígono o vértices de poliedro, que se encuentran sobre lados (Sg) , en particular rectas laterales o superficies laterales, de la subárea y
las etapas de procedimiento 4.1) y/o 6.1) presentan las siguientes etapas de procedimiento:
9.1) especificar la distancia del punto (St, P) con respecto a cada lado (Sg) que presenta un segmento de límite de subárea (TA) del otro límite de subárea (K) en cada caso y
9.2) especificar el punto (St, P) como que se encuentra sobre el otro segmento de límite de subárea (TA) respectivo y/o especificar el segmento de límite de subárea (TA) que presenta este punto (St, P) como que toca a este otro segmento de límite de subárea (TA) cuando la distancia especificada con respecto a la recta lateral (Sg) que presenta este otro segmento de límite de subárea (TA) es menor que una distancia máxima predeterminada.
10. Procedimiento según una de las reivindicaciones anteriores para el caso en el que el corredor presenta dos dimensiones y las intersecciones (S) son puntos de intersección,
caracterizado porque la etapa de procedimiento 1.1) presenta las siguientes etapas de procedimiento:
10.1) determinar las coordenadas originales de estos puntos de intersección (S) y
10.2) ordenar estas coordenadas originales en orden creciente según la sucesión de estos puntos de intersección (S) sobre el límite de subárea (K) respectivo,
y la etapa de procedimiento 1.2) presenta la siguiente etapa de procedimiento:
10.3) especificar los segmentos de límite de subárea (TA) respectivos como secuencia de segmentos entre parejas de coordenadas originales sucesivas según la ordenación, siendo el punto final (P) del último segmento de límite de subárea (TA) del límite de subárea (K) respectivo a la vez el punto de inicio (P) del primer segmento de límite de subárea (TA) de este límite de subárea (K) y siendo el punto final (P) de cada uno de los demás segmentos de límite de subárea (TA) de este límite de subárea (K) a la vez el punto de inicio (P) del siguiente segmento de límite de subárea (TA) en cada caso de este límite de subárea (K) .
11. Procedimiento según una de las reivindicaciones anteriores caracterizado porque el límite de corredor (U) o una imagen bidimensional del límite de corredor (U) se representa gráficamente en un medio de visualización gráfico, en particular un display o monitor.
12. Dispositivo para la especificación de al menos un límite de corredor (U) , que separa al menos un corredor (KF) , en particular una vía marítima, que establece un área de permanencia, en particular admisible, para un vehículo, de al menos un área de entorno, en particular inadmisible, en el que el corredor (KF) comprende varias subáreas (F) que se solapan entre sí al menos parcialmente por parejas y en el que el límite de corredor (U) presenta límites de subárea (K) que limitan segmentos de límite de subárea (TA) de estas subáreas (F) ,
caracterizado por
los siguientes medios para la especificación del límite de corredor (U) :
12.1) medios de determinación de intersección para determinar al menos una intersección (S) , en particular al menos dos puntos de intersección, en cada caso de al menos un límite de subárea (K) de al menos una subárea (F) con en cada caso al menos otro límite de subárea (K) de al menos otra subárea (F) ,
12.2) medios de especificación de segmento para determinar los segmentos del límite de subárea (K) respectivo limitados por la intersección (S) respectiva, en particular por los puntos de intersección, como los segmentos de límite de subárea (TA) respectivos así como, en el caso de que para al menos un límite de subárea (K) no se haya determinado ninguna intersección (S) , para especificar este límite de subárea (K) respectivo como segmento de límite de subárea (TA) respectivo,
12.3) medios de determinación de posición para determinar si los segmentos de límite de subárea (TA) respectivos se encuentran fuera o dentro de la otra subárea (F) en cada caso, y
12.4) medios de especificación de límite de corredor para especificar el límite de corredor (U) a partir de los segmentos, que se encuentran fuera de cada una de las demás subáreas (F) en cada caso, de estos segmentos de límite de subárea (TA) determinados como que se encuentran fuera de al menos otra subárea (F) en cada caso,
y además caracterizado por
12.5) una configuración del dispositivo de tal manera que a) para cada subárea (F) del corredor (KF) se calculan segmentos de límite de subárea (TA) , que han de rechazarse, del límite de subárea (K) de esta subárea (F) respectiva, con respecto a cada subárea (F) del corredor (KF) que se solapa con esta subárea (F) respectiva,
b) puede producirse una modificación del corredor (KF) mediante la retirada de al menos una subárea (F) de las subáreas (F) ya comprendidas por el corredor (KF) antes de esta modificación, no calculándose de nuevo los segmentos de límite de subárea (TA) , que han de rechazarse, de los límites de subárea (K) , con respecto a subáreas (F) que tras esta modificación todavía están comprendidas por el corredor (KF) , y
c) el límite de corredor (U) se obtiene a partir de los límites de subárea (K) de todas las subáreas (F) del corredor (KF) todavía comprendidas por el corredor (KF) tras esta modificación menos todos los segmentos que han de rechazarse al menos una vez de todos estos límites de subárea (K) , y se visualiza en un aparato de visualización.
13. Dispositivo según la reivindicación 12,
caracterizado por
medios para la realización de la etapas de procedimiento según una de las reivindicaciones 2 a 9.
14. Dispositivo según la reivindicación 12 ó 13,
caracterizado por
un medio de visualización gráfico, en particular un display o monitor, en el que puede representarse gráficamente el límite de corredor (U) o una imagen bidimensional del límite de corredor (U) .
15. Programa informático que comprende medios de código de programa informático que son adecuados para la realización del procedimiento según una de las reivindicaciones 1 a 10 cuando este programa informático se ejecuta en un ordenador.
Patentes similares o relacionadas:
Sugerencia de ruta en tiempo real para un dispositivo móvil con localización habilitada, del 22 de Abril de 2020, de QUALCOMM INCORPORATED: Un procedimiento implementado por ordenador para navegar basándose en la direccionalidad, que comprende: determinar una posición de un […]
Arquitectura de seguridad para vehículos autónomos, del 1 de Abril de 2020, de CARNEGIE MELLON UNIVERSITY: Un sistema de arquitectura de seguridad para vehículos autónomos, que comprende: una primera fase, que comprende: una unidad […]
MÉTODO Y SISTEMA DE NAVEGACIÓN PERSONAL MEDIANTE SONIDO BINAURAL, del 2 de Marzo de 2020, de Geko Navsat S.L: Método y sistema de navegación personal mediante sonido binaural. El sistema comprende unos auriculares estereofónicos y un dispositivo portátil con […]
Aparato de sistema, servidor, terminal, programa y método de suministro de información, del 26 de Febrero de 2020, de RAKUTEN, INC: Un aparato servidor que comprende: un medio de recepción de solicitud de adquisición de información que recibe información de aceleración […]
Método y dispositivo para guiar inteligentemente un usuario a tomar un ascensor/escalera mecánica, del 25 de Diciembre de 2019, de Xiaomi Inc: Un método para guiar inteligentemente un usuario a un ascensor/escalera mecánica, que se aplica en un terminal, incluyendo: determinar […]
 Procedimiento de estimación del movimiento de un peatón, del 25 de Diciembre de 2019, de SYSNAV: Procedimiento de estimación del movimiento de un peatón en marcha que comprende las etapas de:
(a) medir una aceleración y una velocidad […]
Procedimiento de estimación del movimiento de un peatón, del 25 de Diciembre de 2019, de SYSNAV: Procedimiento de estimación del movimiento de un peatón en marcha que comprende las etapas de:
(a) medir una aceleración y una velocidad […]
Generación de mapa de punto de interés dependiente de localización, del 20 de Noviembre de 2019, de BMC Software, Inc: Método implementado por ordenador, comprendiendo el método: recibir , desde un dispositivo informático remoto, un mapa que indica una disposición […]
Optimización de ruta para un vehículo para medios fluidos, del 13 de Noviembre de 2019, de ThyssenKrupp Marine Systems GmbH: Procedimiento para calcular una ruta para un vehículo para medios fluidos, en donde el vehículo para medios fluidos es un vehículo subacuático, y en donde […]