PROCEDIMIENTO Y DISPOSITIVO PARA DETERMINAR LAS COORDENADAS ESPACIALES DE UN ARTÍCULO.
Procedimiento para determinar las coordenadas espaciales de un artículo,
en el que el artículo se ilumina con un dispositivo de proyección a partir de al menos dos direcciones con patrones de luz, y los patrones de luz proyectados en el artículo se registran por puntos con un primer dispositivo de registro de resolución bidimensional, determinándose valores de fase para los respectivos puntos registrados de la superficie del artículo y usándose éstos para calcular parámetros geométricos y coordenadas espaciales de los puntos, caracterizado porque los patrones de luz proyectados en el artículo a partir de las al menos dos direcciones o partes de los mismos se registran por puntos adicionalmente por al menos un segundo dispositivo de registro, permaneciendo la al menos una segunda disposición de registro fija con respecto al artículo que va a medirse y porque a partir de los puntos de los patrones de luz proyectados registrados con el segundo dispositivo de registro se determinan al menos cuatro valores de medición de fase, a partir de los cuales se calculan los parámetros geométricos del dispositivo de proyección para las al menos dos direcciones de proyección
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2003/004210.
Solicitante: FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V..
Nacionalidad solicitante: Alemania.
Dirección: HANSASTRASSE 27C 80686 MUNCHEN ALEMANIA.
Inventor/es: KUHMSTEDT, PETER, NOTNI, GUNTHER, HEINZE,Mathias.
Fecha de Publicación: .
Fecha Solicitud PCT: 23 de Abril de 2003.
Clasificación Internacional de Patentes:
- G01B11/25D
Clasificación PCT:
- G01B11/25 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › mediante la proyección de un patrón, p. ej.franjas de Moiré, sobre el objeto (G01B 11/255 tiene prioridad).
Clasificación antigua:
- G01B11/25 G01B 11/00 […] › mediante la proyección de un patrón, p. ej.franjas de Moiré, sobre el objeto (G01B 11/255 tiene prioridad).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre.
PDF original: ES-2356434_T3.pdf
Fragmento de la descripción:
La invención se refiere a un procedimiento para determinar las coordenadas espaciales de un artículo según el preámbulo de la reivindicación independiente así como a un dispositivo para realizar el procedimiento.
Para el registro en superficie sin contacto de formas de superficie, geometrías de superficie o coordenadas de puntos seleccionados se utilizan distintos principios ópticos. A este respecto todos los procedimientos tienen en 5 común que la determinación de las coordenadas tridimensionales de un punto de medición de superficie sólo es posible entonces cuando al menos existen tres valores de medición independientes para este punto. Adicionalmente se aceptan suposiciones sobre la geometría del sistema de medición en el resultado.
Un procedimiento es la clásica técnica de proyección de bandas que se realiza con una o varias cámaras CCD y un proyector. (Documentos DE 41 20 115 C2, DE 41 15 445 A1). En dispositivos de este tipo se proyectan 10 las líneas de rejilla o secuencias de código Gray en la superficie que va a medirse. Una cámara CCD registra en cada uno de sus elementos receptores la intensidad de un punto de imagen en la superficie. Con algoritmos matemáticos conocidos se calculan valores de medición de fase a partir de los valores de medición de intensidad. Las coordenadas del objeto solicitadas pueden calcularse a continuación a partir de los valores de medición de fase y las coordenadas de imagen de los puntos de medición en el plano de imagen del sistema de grabación. Sin 15 embargo para ello se requiere el conocimiento de la geometría del sistema de medición (parámetros de orientación del proyector y la cámara) así como las propiedades de imagen de la óptica de proyección y de imagen.
El número de los parámetros de orientación que van a determinarse puede limitarse considerablemente cuando se usan exclusivamente los valores de medición de fase para el cálculo de coordenadas. En tales sistemas, la posición de un elemento receptor individual en el sistema de grabación determina exclusivamente el sitio de 20 medición, sin embargo no se evalúa como información de medición. Mediante la iluminación de la escena a partir de varias, sin embargo al menos tres direcciones de proyección con líneas de rejilla o también secuencias de código Gray y la observación con una o varias cámaras colocadas de manera fija con respecto al objeto, pueden calcularse por ejemplo coordenadas en caso de geometría conocida del sistema de iluminación. En todos estos sistemas deben registrarse por separado los parámetros del sistema (parámetros de orientación), teniendo lugar esto 25 normalmente mediante una denominada calibración previa del sistema. A este respecto se miden los cuerpos de calibración con geometría conocida, con ayuda de los cuales se conforman los parámetros geométricos de la estructura de medición (documento DE 195 36 297 A1). Este modo de procedimiento siempre es inservible cuando los parámetros geométricos en mediciones adicionales no pueden mantenerse constantes, por ejemplo mediante la influencia de la temperatura o como consecuencia del esfuerzo mecánico del sistema o cuando condicionado por la 30 complejidad de la función de medición se requiere una disposición de sensor variable y por tanto no se tiene en cuenta una medición con disposición establecida previamente.
Los procedimientos de medición fotogramétricos superan la dificultad de un procedimiento de medición inicial separado. Como información de medición sirven en este caso las coordenadas de imagen, o sea la posición de los puntos de medición en la cuadrícula del sistema de grabación. A partir de al menos dos posiciones de cámara 35 diferentes deben conocerse las coordenadas de imagen para un punto del objeto. A este respecto es ventajoso, en caso de este procedimiento de medición, que pueda obtenerse por punto de medición un valor de medición excedente, es decir en caso de dos posiciones de cámara existe un valor de medición más que es necesario para el cálculo de las tres coordenadas de un punto. De esta manera es posible, en caso de suficientemente muchos puntos de medición, calcular de manera simultánea coordenadas, parámetros de orientación interiores y exteriores de las 40 cámaras así como parámetros de corrección para la distorsión. Sin embargo resultan dificultades en caso de la localización de los puntos homólogos necesarios para ello, sobre todo para muchos puntos de medición. Para esto, en procedimientos de procesamiento de imágenes costosos, deben colocarse en relación texturas o estructuraciones de superficie a partir de distintas grabaciones (documento DE 195 36 296 A1). Precisamente para un registro en superficie completo de una superficie del objeto no es posible esto con coste justificable. También se 45 requieren marcas como puntos de conexión para la unión de las vistas parciales.
En el documento DE 196 37 682 A1 se propone un sistema que supera estos problemas. A este respecto, un sistema de proyección ilumina la escena con una serie de imágenes de banda, compuestas por dos secuencias desplazadas en 90º una con respecto a la otra. Tales imágenes de banda proyectadas en el objeto a partir de dos posiciones distintas permiten, en caso de observación simultánea con una cámara colocada de manera fija, una 50 evaluación según el modelo funcional de la fotogrametría. Resultan inconvenientes de este concepto de sistema sobre todo en caso de medición completa de objetos complejos. Con la complejidad del objeto de medición aumenta también el número de las vistas necesarias. Sin embargo no es conveniente aumentar el número de cámaras, dado que existe una información de medición sólo en un punto del objeto que tanto se ilumina a partir de dos direcciones distintas, como se observa desde la cámara. El ajuste del sistema de medición, es decir el ajuste de las cámaras 55 necesarias se convierte además de ese modo en tanto más difícil cuantas más vistas deban ajustarse. Para funciones de medición complejas, un ajuste de este tipo prospectivo del sistema de sensor no es posible siempre de manera satisfactoria. En caso de procedimientos conocidos es inconveniente además que el resultado de la medición para una estimación no esté a disposición siempre hasta el final del procedimiento de medición completo. A este respecto no es posible una evaluación intermedia y después de manera constructiva una colocación 60 adaptada del proyector y de la(s) cámara(s).
Por el documento DE 100 25 741 A1 se conoce un procedimiento para determinar las coordenadas espaciales de artículos y/o su modificación temporal, en el que se ilumina el artículo en cada caso a partir de al menos dos direcciones con una serie de patrones de luz que se registran con una disposición de sensor de resolución bidimensional y concretamente para registrar vistas distintas en posiciones distintas de la disposición de sensor. A este respecto, en caso de una nueva posición de la disposición de sensor se selecciona al menos una 5 dirección de proyección de modo que coincida con una dirección de proyección de la posición anterior de la disposición de sensor. En caso de estas dos direcciones de proyección, los valores de medición de fase son idénticos y a partir de ello puede determinarse una norma de conexión entre los puntos de registro de la disposición de sensor en la posición nueva y la anterior. Este sistema puede autocalibrarse, es decir no debe conocerse antes de una medición ninguna variable del sistema geométrica u óptica, o debe calibrarse previamente. La calibración 10 tiene lugar en caso de este procedimiento conocido durante la medición, es decir la cámara de calibración es simultáneamente la cámara de medición. Este procedimiento no es satisfactorio por ejemplo en caso de objetos complejos, dado que no han de evitarse sombreados.
La invención se basa en el objetivo de crear un procedimiento para determinar las coordenadas espaciales de un artículo, con el que es posible una medición de artículos complejos sin marcas o texturas, sin la localización 15 de puntos homólogos y sin que deban conocerse variables del sistema geométricas u ópticas o deban calibrarse previamente, no estando limitado el número de posibles direcciones de grabación por el número de cámaras y pudiendo reducirse el tiempo de medición.
Este objetivo se soluciona según la invención mediante las características de la reivindicación independiente. 20
Dado que los patrones de luz proyectados en el artículo a partir de las al menos dos direcciones se registran por puntos como imagen no sólo en cada caso por un primer dispositivo de registro... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para determinar las coordenadas espaciales de un artículo, en el que el artículo se ilumina con un dispositivo de proyección a partir de al menos dos direcciones con patrones de luz, y los patrones de luz proyectados en el artículo se registran por puntos con un primer dispositivo de registro de resolución bidimensional, determinándose valores de fase para los respectivos puntos registrados de la superficie del artículo y usándose éstos para calcular parámetros geométricos y coordenadas espaciales de los puntos, caracterizado porque los 5 patrones de luz proyectados en el artículo a partir de las al menos dos direcciones o partes de los mismos se registran por puntos adicionalmente por al menos un segundo dispositivo de registro, permaneciendo la al menos una segunda disposición de registro fija con respecto al artículo que va a medirse y porque a partir de los puntos de los patrones de luz proyectados registrados con el segundo dispositivo de registro se determinan al menos cuatro valores de medición de fase, a partir de los cuales se calculan los parámetros geométricos del dispositivo de 10 proyección para las al menos dos direcciones de proyección.
2. Procedimiento según la reivindicación 1, caracterizado porque tras determinar los parámetros geométricos del dispositivo de proyección se calculan los parámetros geométricos del primer dispositivo de registro usando los parámetros geométricos del dispositivo de proyección en la respectiva dirección de proyección y al menos dos valores de medición de fase, que se determinan a partir de los patrones de luz proyectados a partir de la respectiva 15 dirección, registrados con el primer dispositivo de registro.
3. Procedimiento según la reivindicación 1 ó 2, caracterizado porque usando los parámetros geométricos determinados anteriormente del dispositivo de proyección y el primer dispositivo de registro y al menos un valor de medición de fase, que se determina a partir de los patrones de luz proyectados a partir de la respectiva dirección, registrados con el primer dispositivo de registro, se calculan las coordenadas tridimensionales de los respectivos 20 puntos del artículo.
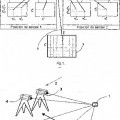
4. Procedimiento según una de las reivindicaciones 1 a 3, caracterizado porque tras proyectar los patrones de luz a partir de una primera dirección y registrar la vista del artículo a partir de una primera dirección se trasladan el dispositivo de proyección y el primer dispositivo de registro para proyectar a partir de una segunda dirección y registrar otra vista del artículo a partir de una segunda dirección desde una primera posición hacia una segunda 25 posición.
5. Procedimiento según una de las reivindicaciones 1 a 4, caracterizado porque para medir diferentes vistas del artículo se trasladan el dispositivo de proyección y el primer dispositivo de registro juntos hacia diferentes posiciones.
6. Procedimiento según una de las reivindicaciones 1 a 5, caracterizado porque los parámetros geométricos 30 del dispositivo de proyección y del primer dispositivo de registro son parámetros de orientación.
7. Procedimiento según la reivindicación 3, caracterizado porque se usan dos valores de medición de fase y se calcula dos veces cada coordenada espacial y se realiza una determinación del promedio.
8. Procedimiento según una de las reivindicaciones 1 a 7, caracterizado porque el artículo se ilumina a partir de cada dirección de proyección en una primera etapa con una rejilla de líneas y/o secuencias de código Gray y en 35 una segunda etapa con la rejilla de líneas girada 90º con respecto a la dirección de proyección y/o las secuencias de código Gray giradas 90º.
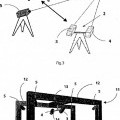
9. Dispositivo para realizar el procedimiento según una de las reivindicaciones 1 a 8 con al menos una disposición de sensor, que presenta un dispositivo de proyección que proyecta patrones de luz y un primer dispositivo de registro de resolución bidimensional para registrar un artículo iluminado con los patrones de luz, con al 40 menos un segundo dispositivo de registro para registrar el artículo iluminado con los patrones de luz, con una mesa de medición que soporta al artículo que va a medirse y una unidad de evaluación para determinar parámetros del sistema de medición y/o coordenadas espaciales del artículo, estando fijo el al menos un segundo dispositivo de fijación con respecto al artículo alojado en la mesa de medición y pudiendo moverse la disposición de sensor y el artículo relativamente uno con respecto al otro. 45
10. Dispositivo según la reivindicación 9, caracterizado porque el dispositivo de proyección y el primer dispositivo de registro de la disposición de sensor están conectados de manera fija entre sí.
11. Dispositivo según la reivindicación 9, caracterizado porque el dispositivo de proyección y el primer dispositivo de registro de la disposición de sensor pueden trasladarse y/o moverse independientemente entre sí.
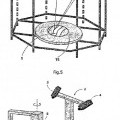
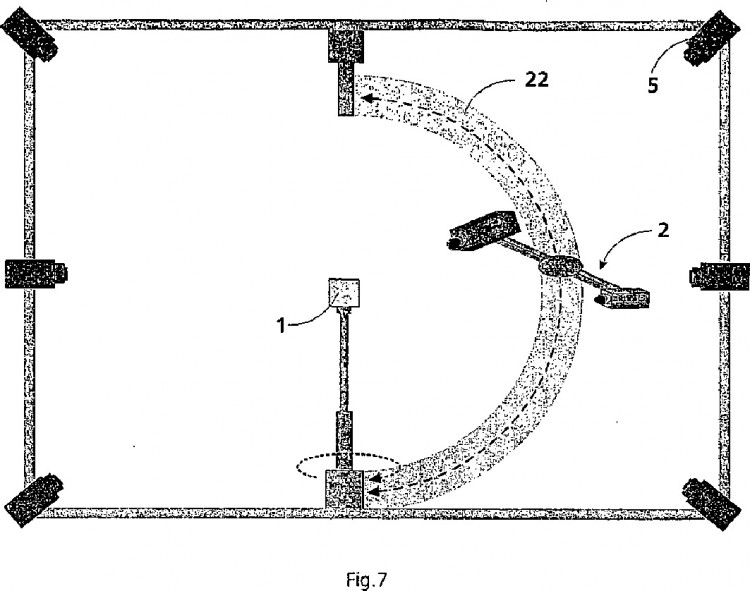
12. Dispositivo según una de las reivindicaciones 9 a 11, caracterizado porque la disposición de sensor está 50 dispuesta en una unidad giratoria, en cuyo punto central se encuentra la mesa de medición y la disposición de sensor realiza un movimiento de giro con respecto al artículo.
13. Dispositivo según una de las reivindicaciones 9 a 11, caracterizado porque la mesa de medición puede girarse y al menos un segundo dispositivo de registro está conectado de manera fija con la mesa de medición
giratoria, mientras que la disposición de sensor está dispuesta de manera fija.
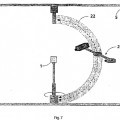
14. Dispositivo según una de las reivindicaciones 9 a 11, caracterizado porque la disposición de sensor está fijada de manera que puede colocarse libremente a una pista de guiado que puede girar alrededor de la mesa de medición preferiblemente en 360ºC.
15. Dispositivo según una de las reivindicaciones 9 a 14, caracterizado porque se prevé una pluralidad de 5 segundos dispositivos de registro fijos a la mesa de medición.
16. Dispositivo según una de las reivindicaciones 9 a 15, caracterizado porque el segundo dispositivo de registro presenta al menos tres fotodetectores.
Patentes similares o relacionadas:
PROCEDIMIENTO Y APARATO PARA DETERMINAR LA DIMENSIÓN GEOMÉTRICA DE UNA RUEDA DE VEHÍCULO QUE COMPRENDE SENSORES ÓPTICOS, del 24 de Noviembre de 2011, de SNAP-ON EQUIPMENT SRL A UNICO SOCIO.: Un procedimiento de montaje o desmontaje de un neumático de vehículo a motor que comprende las etapas de: - fijar una llanta de una rueda de vehículo a […]
 LUZ ESTRUCTURADA CODIFICADA, del 20 de Enero de 2011, de 3SHAPE A/S: Sistema para crear un modelo tridimensional de una superficie que comprende lo siguiente: (a) una fuente de luz que proyecta un patrón […]
LUZ ESTRUCTURADA CODIFICADA, del 20 de Enero de 2011, de 3SHAPE A/S: Sistema para crear un modelo tridimensional de una superficie que comprende lo siguiente: (a) una fuente de luz que proyecta un patrón […]
 ESCANEADO OPTICO DE UN PERFIL, del 21 de Abril de 2010, de DELTARAIL GROUP LIMITED: Un método de determinación de un perfil de una superficie de un objeto , teniendo el objeto un eje longitudinal y siendo el perfil perpendicular al eje longitudinal, […]
ESCANEADO OPTICO DE UN PERFIL, del 21 de Abril de 2010, de DELTARAIL GROUP LIMITED: Un método de determinación de un perfil de una superficie de un objeto , teniendo el objeto un eje longitudinal y siendo el perfil perpendicular al eje longitudinal, […]
Dispositivo y procedimiento para la detección sin contacto de estructuras de tejido rojas, así como disposición para desprender una banda de estructuras de tejido rojas, del 22 de Julio de 2020, de NORDISCHER MASCHINENBAU RUD. BAADER GMBH + CO KG: Dispositivo para la detección sin contacto de estructuras de tejido rojas en productos de carcasas de animales sacrificados, que comprende un equipo […]
Imagen detallada de video de la geometría de vía, del 17 de Junio de 2020, de VolkerRail Nederland BV: Tren de medición con un sistema óptico que cuenta con medios para realizar un registro de imágenes con una cámara y una lámpara, por ejemplo, imágenes detalladas de […]
Método y dispositivo de medida de planicidad de un producto metálico, del 3 de Junio de 2020, de Primetals Technologies Austria GmbH: Metodo de medida de planicidad de un producto metalico, en forma o bien de una banda o bien de una placa de una linea de tratamiento metalurgico, dicho producto […]
Transmisión de máscara espacial afín e invariante para la detección de profundidad activa, del 6 de Mayo de 2020, de QUALCOMM INCORPORATED: Un procedimiento operativo en un dispositivo transmisor para proyectar una máscara de código compuesta , que comprende: obtener […]
Sistema para la detección óptica de objetos, del 6 de Mayo de 2020, de Phenospex B.V: Sistema para la detección óptica de objetos, por medio de triangulación láser con una fuente para la generación de luz de una primera longitud de onda, donde […]